OpenRisc-59-jtag_tap模块分析
引言
“知其然,还要知其所以然”,在搭建好ORPSoC的仿真环境和调试环境之后,我们有必要对仿真和调试系统中扮演重要角色的jtag_tap模块和adv_dbg_if模块进行进一步的分析,以了解其工作机制。
本小节就来分析advanced debug system中的tap_top模块。
1,from SPI to JTAG
在分析JTAG的具体实现之前,我们先了解一下JTAGF的基本知识。
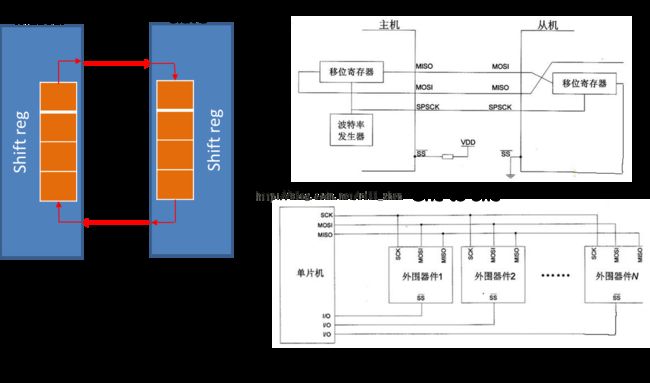
A、JTAG协议的本质与SPI协议并没有什么不同,它等于一个复杂的SS状态机+变长的MOSI和MISO数据移位操作。不过所谓的变长,都是事先约定好的。
B、JTAG协议是一个同步通讯协议,它是全双工的。它的通讯原则是“以物易物”——即你如果想得到某些东西,你必须先给与相同长度的内容;你如果只是想发送一些数据,也会自动获取相同长度的内容,至于交换的内容是否有意义,这是另外一回事了。
C、JTAG协议无论多么复杂,实际上只有4根线起作用(有时候还有两根鸡肋的nSRST和TRST),他们分别是TMS、TCK、TDI和TDO,他们分别对应SPI协议里面的SS、SCK、MOSI和MISO。在本质上,他们并没有什么不同。即便是ARM的JTAG那么多的引脚,实际上起作用JTAG的也就这4根线而已。
D、JTAG的数据操作都是基于移位寄存器的。
E、如果JTAG协议在某个下载仿真协议中只是用来发送控制信息和少量的数据,而大量的数据传输是通过额外的其它引脚进行的,即便这个协议被称为JTAG仿真其本质也早已超过JTAG了,严格来说,不应该称之为JTAG。因为JTAG协议中就只有4根线(有时候也算上nSRST和TRST)而已。典型的如NEXUS协议。
B、JTAG协议是一个同步通讯协议,它是全双工的。它的通讯原则是“以物易物”——即你如果想得到某些东西,你必须先给与相同长度的内容;你如果只是想发送一些数据,也会自动获取相同长度的内容,至于交换的内容是否有意义,这是另外一回事了。
C、JTAG协议无论多么复杂,实际上只有4根线起作用(有时候还有两根鸡肋的nSRST和TRST),他们分别是TMS、TCK、TDI和TDO,他们分别对应SPI协议里面的SS、SCK、MOSI和MISO。在本质上,他们并没有什么不同。即便是ARM的JTAG那么多的引脚,实际上起作用JTAG的也就这4根线而已。
D、JTAG的数据操作都是基于移位寄存器的。
E、如果JTAG协议在某个下载仿真协议中只是用来发送控制信息和少量的数据,而大量的数据传输是通过额外的其它引脚进行的,即便这个协议被称为JTAG仿真其本质也早已超过JTAG了,严格来说,不应该称之为JTAG。因为JTAG协议中就只有4根线(有时候也算上nSRST和TRST)而已。典型的如NEXUS协议。
这里面重点理解的是“以物易物”,这个概念,下面是SPI的工作机制以及one-to-one和one-to-many的组织。如下图所示:
2,jtag_tap
1>architecture
TAP(test access port)的作用是提供adv_dbg_if模块和外部JTAG cable之间的桥梁作用,负责将jtag cable传来的数据传给tap支持的所有device,并将来自device的数据shift out到tdo上。
下面是adv_debug_sys系统硬件部分的结构:
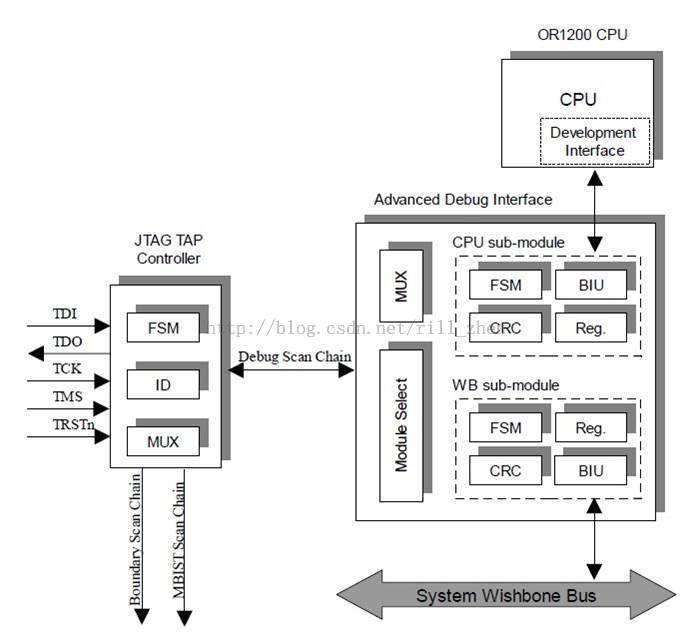
jtag_tap一共支持4个chain(相当于SPI中SPI总线上挂有4个device),其中IDCODEchain在jtag_tap模块内部,其它3个在外部,如上图所示。
2>tap fsm
IEEE 1149.1中定义了FSM,所以几乎所有的JTAG模块都会实现相同的FSM。如下所示:

说明:
整个状态机分为三个部分:信道选择部分、数据信道和指令信道。所谓的信道选择,就是图中最顶上由四个状态组成的矩形,分别对应着四个状态:
a,JTAG TAP状态机复位状态
顾名思义,就是进入该状态,将导致整个硬件TAP控制器复位,所有的寄存器都将被初始化。在TCK的上升沿,TMS为低电平时,进入下一个状态;否则保持不变。
b,JTAG TAP的Run-Test/Idle状态
其实就是“开工”和“休息”的选择分支点。在TCK的上升沿,TMS的高电平将导致状态切换,进入数据信道的通讯状态;否则保持不变。
c,JTAG TAP的Select-DR Scan状态
Select DR Scan,就是当我们在该状态下,TCK的上升沿读取到了TMS的低电平将直接进入数据信道的操作子状态机;在TCK的上升沿读取到了TMS的高电平,将切换到指令信道的通讯状态。
d,JTAG TAP的Select-IR Scan状态
Select-IR Scan,就是当我们在该状态下,TCK的上升沿读取到了TMS的低电平将直接进入指令信道的操作状态机;在TCK的上升沿读取到了TMS的高电平,将重新回到JTAG的复位状态。
数据信道和指令信道对应着两个子状态机,从本质上数据和指令并没有任何不同,只是习惯上,指令的长度固定为4个二进制位(AVR32的JTAG是5个),而数据则随着不同的指令选择了不同长度的指令寄存器,这个就需要具体查阅相关的协议说明了,比如JTAG IDCODE的长度固定为32位,而AVR32的复位指令却有5位。下面,只就常见的几个状态进行解释(以数据信道为例)。
a,Capture DR状态
JTAG协议是基于移位寄存器的,其通讯具有“以物易物”的特性,在我们进入真正的数据传输之前,需要告知JTAG“准备通讯了哦?你有没有东西要给我哈?”,于是Capture DR就是一个给JTAG机会将需要传达给我们的数据放入指定的移位寄存器中的状态。
b,Shift DR状态
这个状态就是通过TDI和TDO进行数据传输的状态。需要说明的是,即便进入了该状态,TMS上的电平在TCK的上升沿也是会被读取的,从图中看到,一旦在TMS上读取到高电平,系统就会跳出Shift DR状态
如果此时数据没有传输完成,造成的后果是不确定的。请大家注意,我所说的是不确定,而不是“很严重”:同样是因为移位寄存的传输特性,有时候并不要求一定要将所有的数据都完整的进行传输,比如在AVR32中,针对SAB的数据操作,往往只需要进行最关键的部分,详细地内容可以参照相关的数据手册;
但有的时候,数据的不完整传输则会导致很严重的后果,这取决于具体的JTAG通讯协议。所以,为了保险起见,一旦进入Shift DR状态,在发送最后一个数据之前,请保持TMS为低电平,当要发送最后一个数据时,应该将TMS设置为高电平,这样,当TCK跳变为上升沿时,系统既完成了最后一个数据的传输,也成功的退出了Shift DR状态。
c,Exit1 DR状态
该状态提供了我们一个在刚才输入的数据生效前,重新修改的机会。一般情况下,我们直接保持TMS的高电平,并在TCK的上升沿驱动TAP状态机,直接进入Update-DR状态。
d,Update-DR状态
顾名思义,就是使我们输入的数据生效——一般JTAG内部的动作就是触发一个锁存信号,将移位寄存器中的内容并行的读取到对应的寄存器中。Update-DR有两个出口,一个是,TMS的低电平对应Run-test/ Idle,还有一个是TMS的高电平对应的Select-DR Scan。这两个操作看似区别不大,但是意义非凡。前者往往会导致JTAG内部产生额外的时序(比如发生一个信号,表示完成了一个特定的周期操作,在AVR的JTAG下载中有此实例);后者则表示完成了一次数据操作,将进行下一个数据的操作,但是这些操作属于同一个操作周期。当然有些情况下,这两种方法是没有区别的。
a,JTAG TAP状态机复位状态
顾名思义,就是进入该状态,将导致整个硬件TAP控制器复位,所有的寄存器都将被初始化。在TCK的上升沿,TMS为低电平时,进入下一个状态;否则保持不变。
b,JTAG TAP的Run-Test/Idle状态
其实就是“开工”和“休息”的选择分支点。在TCK的上升沿,TMS的高电平将导致状态切换,进入数据信道的通讯状态;否则保持不变。
c,JTAG TAP的Select-DR Scan状态
Select DR Scan,就是当我们在该状态下,TCK的上升沿读取到了TMS的低电平将直接进入数据信道的操作子状态机;在TCK的上升沿读取到了TMS的高电平,将切换到指令信道的通讯状态。
d,JTAG TAP的Select-IR Scan状态
Select-IR Scan,就是当我们在该状态下,TCK的上升沿读取到了TMS的低电平将直接进入指令信道的操作状态机;在TCK的上升沿读取到了TMS的高电平,将重新回到JTAG的复位状态。
数据信道和指令信道对应着两个子状态机,从本质上数据和指令并没有任何不同,只是习惯上,指令的长度固定为4个二进制位(AVR32的JTAG是5个),而数据则随着不同的指令选择了不同长度的指令寄存器,这个就需要具体查阅相关的协议说明了,比如JTAG IDCODE的长度固定为32位,而AVR32的复位指令却有5位。下面,只就常见的几个状态进行解释(以数据信道为例)。
a,Capture DR状态
JTAG协议是基于移位寄存器的,其通讯具有“以物易物”的特性,在我们进入真正的数据传输之前,需要告知JTAG“准备通讯了哦?你有没有东西要给我哈?”,于是Capture DR就是一个给JTAG机会将需要传达给我们的数据放入指定的移位寄存器中的状态。
b,Shift DR状态
这个状态就是通过TDI和TDO进行数据传输的状态。需要说明的是,即便进入了该状态,TMS上的电平在TCK的上升沿也是会被读取的,从图中看到,一旦在TMS上读取到高电平,系统就会跳出Shift DR状态
如果此时数据没有传输完成,造成的后果是不确定的。请大家注意,我所说的是不确定,而不是“很严重”:同样是因为移位寄存的传输特性,有时候并不要求一定要将所有的数据都完整的进行传输,比如在AVR32中,针对SAB的数据操作,往往只需要进行最关键的部分,详细地内容可以参照相关的数据手册;
但有的时候,数据的不完整传输则会导致很严重的后果,这取决于具体的JTAG通讯协议。所以,为了保险起见,一旦进入Shift DR状态,在发送最后一个数据之前,请保持TMS为低电平,当要发送最后一个数据时,应该将TMS设置为高电平,这样,当TCK跳变为上升沿时,系统既完成了最后一个数据的传输,也成功的退出了Shift DR状态。
c,Exit1 DR状态
该状态提供了我们一个在刚才输入的数据生效前,重新修改的机会。一般情况下,我们直接保持TMS的高电平,并在TCK的上升沿驱动TAP状态机,直接进入Update-DR状态。
d,Update-DR状态
顾名思义,就是使我们输入的数据生效——一般JTAG内部的动作就是触发一个锁存信号,将移位寄存器中的内容并行的读取到对应的寄存器中。Update-DR有两个出口,一个是,TMS的低电平对应Run-test/ Idle,还有一个是TMS的高电平对应的Select-DR Scan。这两个操作看似区别不大,但是意义非凡。前者往往会导致JTAG内部产生额外的时序(比如发生一个信号,表示完成了一个特定的周期操作,在AVR的JTAG下载中有此实例);后者则表示完成了一次数据操作,将进行下一个数据的操作,但是这些操作属于同一个操作周期。当然有些情况下,这两种方法是没有区别的。
3,RTL分析
jtag_tap是advanced debug system项目的一部分,整个advanced debug system我们之前已经介绍过,如有疑问请参考。
jtag_tap模块包含两个RTL文件:tap_defines.v和tap_top.v两个文件。
在了解了JTAG的一般知识之后,我们下面就分析jtag_tap的RTL。
1>tap_defines.v
首先,其内容如下:
// Define IDCODE Value `define IDCODE_VALUE 32'h149511c3 // 0001 version // 0100100101010001 part number (IQ) // 00011100001 manufacturer id (flextronics) // 1 required by standard // Length of the Instruction register `define IR_LENGTH 4 // Supported Instructions `define EXTEST 4'b0000 `define SAMPLE_PRELOAD 4'b0001 `define IDCODE 4'b0010 `define DEBUG 4'b1000 `define MBIST 4'b1001 `define BYPASS 4'b1111
文件包含三部分内容,IDCODE,IR_LENGTH,和instruction定义。
a,一般情况下,每个jtag device对应唯一的一个IDCODE,就像人的名字一样,这个名字用来jtag chain建立的时候‘点名’用的。jtag chain初始化时,读取所有的device的IDCODE,和BSDL文件中的IDCODE比较,获得device name,显示出来。
b,IR_LENGTH是一个非常重要的变量。上面我们在介绍JTAG时,说过,JTAG是基于shift register的总线,所以这个shift register长度的重要性不言而喻。IR_LENGTH的值不是随便设置的,而是根据其对应的jtag具体实现来决定的。大多jtag tap的IR_LENGTH都是4(bit),当然也有不是4的。比如我用的ML501的板子上的4个jtag device的IR_LENGTH分别是10,8,8,12。
c,instruction就是操作jtag tap模块支持的指令,这个参数,不同的tap大不相同,具体支持什么指令,可从bsdl文件中获得。下面就是jtag_tap的bsdl文件:
-- This is a minimal BSDL file describing the particulars -- of the OpenCores standard / native TAP. It is designed -- only to be used by the adv_jtag_bridge program. This -- file almost certainly lacks key entries and attributes -- required by other JTAG / BSDL systems. -- -- by Nathan Yawn ([email protected]) -- Copyright: This file is released into the public domain. -- entity OC_TAP is attribute INSTRUCTION_LENGTH of OC_TAP : entity is 4; attribute INSTRUCTION_OPCODE of OC_TAP : entity is "EXTEST (0000)," & "SAMPLE_PRELOAD (0001)," & "IDCODE (0010)," & "MBIST (1001)," & "DEBUG (1000)," & "BYPASS (1111),"; attribute IDCODE_REGISTER of OC_TAP : entity is "0001" & -- version "0100100101010001" & -- part number "00011100001" & -- manufacturer (flextronics) "1"; -- required by 1149.1 end OC_TAP;
2>tap_top.v
这个文件是jtag_tap模块的具体逻辑实现文件。
a,接口定义
// Top module
module tap_top(
// JTAG pads
tms_pad_i,
tck_pad_i,
trstn_pad_i,
tdi_pad_i,
tdo_pad_o,
tdo_padoe_o,
// TAP states
test_logic_reset_o,
run_test_idle_o,
shift_dr_o,
pause_dr_o,
update_dr_o,
capture_dr_o,
// Select signals for boundary scan or mbist
extest_select_o,
sample_preload_select_o,
mbist_select_o,
debug_select_o,
// TDO signal that is connected to TDI of sub-modules.
tdi_o,
// TDI signals from sub-modules
debug_tdo_i, // from debug module
bs_chain_tdo_i, // from Boundary Scan Chain
mbist_tdo_i // from Mbist Chain
);
jtag_tap接口可分成5个部分:jtag信号,tap states信号,片选信号,tdi_o,以及从device来的数据信号。
1》首先是jtag信号,除了我们常见的tms,tck,tdi,tdo之外还有两个鸡肋信号:trstn,tdo_oe,前者用来复位tap,后者用来使能tdo。其实这两个信号有没有都可以,tap的复位可以通过tms来实现,tdo使能也可不用。
说到这里,有一个小问题,如果不用trstn信号,上电之后tap的状态是随机的,那么有没有一个固定的tms序列来实现tap的复位呢?答案就在本小节中,如果有疑问的话就找找看吧。
2》其次是ap states信号,给device用的,指示tap的当前状态,device根据这个状态来完成某些操作。
3》片选信号,这个就不用多说了。对于jtag_tap来说,片选信号时根据IR reg中的不同位来决定片选的。
代码如下:
/**********************************************************************************
* *
* Selecting active data register *
* *
**********************************************************************************/
always @ (latched_jtag_ir)
begin
extest_select = 1'b0;
sample_preload_select = 1'b0;
idcode_select = 1'b0;
mbist_select = 1'b0;
debug_select = 1'b0;
bypass_select = 1'b0;
case(latched_jtag_ir) /* synthesis parallel_case */
`EXTEST: extest_select = 1'b1; // External test
`SAMPLE_PRELOAD: sample_preload_select = 1'b1; // Sample preload
`IDCODE: idcode_select = 1'b1; // ID Code
`MBIST: mbist_select = 1'b1; // Mbist test
`DEBUG: debug_select = 1'b1; // Debug
`BYPASS: bypass_select = 1'b1; // BYPASS
default: bypass_select = 1'b1; // BYPASS
endcase
end
b,fsm
jtag_tap的核心就是tap controller的FSM了,常见的三段式风格:
/********************************************************************************** * * * TAP State Machine: Fully JTAG compliant * * * **********************************************************************************/ // Definition of machine state values. We could one-hot encode this, and use 16 // registers, but this uses binary encoding for the minimum of 4 DFF's instead. `define STATE_test_logic_reset 4'hF `define STATE_run_test_idle 4'hC `define STATE_select_dr_scan 4'h7 `define STATE_capture_dr 4'h6 `define STATE_shift_dr 4'h2 `define STATE_exit1_dr 4'h1 `define STATE_pause_dr 4'h3 `define STATE_exit2_dr 4'h0 `define STATE_update_dr 4'h5 `define STATE_select_ir_scan 4'h4 `define STATE_capture_ir 4'hE `define STATE_shift_ir 4'hA `define STATE_exit1_ir 4'h9 `define STATE_pause_ir 4'hB `define STATE_exit2_ir 4'h8 `define STATE_update_ir 4'hD reg [3:0] TAP_state = `STATE_test_logic_reset; // current state of the TAP controller reg [3:0] next_TAP_state; // state TAP will take at next rising TCK, combinational signal // sequential part of the FSM always @ (posedge tck_pad_i or negedge trstn_pad_i) begin if(trstn_pad_i == 0) TAP_state = `STATE_test_logic_reset; else TAP_state = next_TAP_state; end // Determination of next state; purely combinatorial always @ (TAP_state or tms_pad_i) begin case(TAP_state) `STATE_test_logic_reset: begin if(tms_pad_i) next_TAP_state = `STATE_test_logic_reset; else next_TAP_state = `STATE_run_test_idle; end `STATE_run_test_idle: begin if(tms_pad_i) next_TAP_state = `STATE_select_dr_scan; else next_TAP_state = `STATE_run_test_idle; end `STATE_select_dr_scan: begin if(tms_pad_i) next_TAP_state = `STATE_select_ir_scan; else next_TAP_state = `STATE_capture_dr; end `STATE_capture_dr: begin if(tms_pad_i) next_TAP_state = `STATE_exit1_dr; else next_TAP_state = `STATE_shift_dr; end `STATE_shift_dr: begin if(tms_pad_i) next_TAP_state = `STATE_exit1_dr; else next_TAP_state = `STATE_shift_dr; end `STATE_exit1_dr: begin if(tms_pad_i) next_TAP_state = `STATE_update_dr; else next_TAP_state = `STATE_pause_dr; end `STATE_pause_dr: begin if(tms_pad_i) next_TAP_state = `STATE_exit2_dr; else next_TAP_state = `STATE_pause_dr; end `STATE_exit2_dr: begin if(tms_pad_i) next_TAP_state = `STATE_update_dr; else next_TAP_state = `STATE_shift_dr; end `STATE_update_dr: begin if(tms_pad_i) next_TAP_state = `STATE_select_dr_scan; else next_TAP_state = `STATE_run_test_idle; end `STATE_select_ir_scan: begin if(tms_pad_i) next_TAP_state = `STATE_test_logic_reset; else next_TAP_state = `STATE_capture_ir; end `STATE_capture_ir: begin if(tms_pad_i) next_TAP_state = `STATE_exit1_ir; else next_TAP_state = `STATE_shift_ir; end `STATE_shift_ir: begin if(tms_pad_i) next_TAP_state = `STATE_exit1_ir; else next_TAP_state = `STATE_shift_ir; end `STATE_exit1_ir: begin if(tms_pad_i) next_TAP_state = `STATE_update_ir; else next_TAP_state = `STATE_pause_ir; end `STATE_pause_ir: begin if(tms_pad_i) next_TAP_state = `STATE_exit2_ir; else next_TAP_state = `STATE_pause_ir; end `STATE_exit2_ir: begin if(tms_pad_i) next_TAP_state = `STATE_update_ir; else next_TAP_state = `STATE_shift_ir; end `STATE_update_ir: begin if(tms_pad_i) next_TAP_state = `STATE_select_dr_scan; else next_TAP_state = `STATE_run_test_idle; end default: next_TAP_state = `STATE_test_logic_reset; // can't actually happen endcase end // Outputs of state machine, pure combinatorial always @ (TAP_state) begin // Default everything to 0, keeps the case statement simple test_logic_reset = 1'b0; run_test_idle = 1'b0; select_dr_scan = 1'b0; capture_dr = 1'b0; shift_dr = 1'b0; exit1_dr = 1'b0; pause_dr = 1'b0; exit2_dr = 1'b0; update_dr = 1'b0; select_ir_scan = 1'b0; capture_ir = 1'b0; shift_ir = 1'b0; exit1_ir = 1'b0; pause_ir = 1'b0; exit2_ir = 1'b0; update_ir = 1'b0; case(TAP_state) `STATE_test_logic_reset: test_logic_reset = 1'b1; `STATE_run_test_idle: run_test_idle = 1'b1; `STATE_select_dr_scan: select_dr_scan = 1'b1; `STATE_capture_dr: capture_dr = 1'b1; `STATE_shift_dr: shift_dr = 1'b1; `STATE_exit1_dr: exit1_dr = 1'b1; `STATE_pause_dr: pause_dr = 1'b1; `STATE_exit2_dr: exit2_dr = 1'b1; `STATE_update_dr: update_dr = 1'b1; `STATE_select_ir_scan: select_ir_scan = 1'b1; `STATE_capture_ir: capture_ir = 1'b1; `STATE_shift_ir: shift_ir = 1'b1; `STATE_exit1_ir: exit1_ir = 1'b1; `STATE_pause_ir: pause_ir = 1'b1; `STATE_exit2_ir: exit2_ir = 1'b1; `STATE_update_ir: update_ir = 1'b1; default: ; endcase end /********************************************************************************** * * * End: TAP State Machine * * * **********************************************************************************/
c,shift reg
上面说过,JTAG的本质和SPI相同,都是基于shift register的,也就是“以物易物”的思想。那么,如何操作tap呢?通过向tap中写入相应的指令。那么如何将指令写入tap呢?向tap移入任何IR_LENGTH的支持的指令,tap就会移出等长的数据,这个数据没用,直接舍弃即可。
整个过程非常简单,代码如下:
/**********************************************************************************
* *
* jtag_ir: JTAG Instruction Register *
* *
**********************************************************************************/
reg [`IR_LENGTH-1:0] jtag_ir; // Instruction register
reg [`IR_LENGTH-1:0] latched_jtag_ir; //, latched_jtag_ir_neg;
wire instruction_tdo;
always @ (posedge tck_pad_i or negedge trstn_pad_i)
begin
if(trstn_pad_i == 0)
jtag_ir[`IR_LENGTH-1:0] <= `IR_LENGTH'b0;
else if (test_logic_reset == 1)
jtag_ir[`IR_LENGTH-1:0] <= `IR_LENGTH'b0;
else if(capture_ir)
jtag_ir <= 4'b0101; // This value is fixed for easier fault detection
else if(shift_ir)
jtag_ir[`IR_LENGTH-1:0] <= {tdi_pad_i, jtag_ir[`IR_LENGTH-1:1]};
end
assign instruction_tdo = jtag_ir[0]; // This is latched on a negative TCK edge after the output MUX
// Updating jtag_ir (Instruction Register)
// jtag_ir should be latched on FALLING EDGE of TCK when capture_ir == 1
always @ (negedge tck_pad_i or negedge trstn_pad_i)
begin
if(trstn_pad_i == 0)
latched_jtag_ir <= `IDCODE; // IDCODE selected after reset
else if (test_logic_reset)
latched_jtag_ir <= `IDCODE; // IDCODE selected after reset
else if(update_ir)
latched_jtag_ir <= jtag_ir;
end
/**********************************************************************************
* *
* End: jtag_ir *
* *
**********************************************************************************/
上面的代码可分成三部分来看,指令移入,指令移出,指令生效。需要注意的地方有以下几点:
首先,在移出之前,如果想读指令的话(进入 capture_ir状态),移出的将是0101。
其次,从jtag cable移进来的数据放在jtag_ir寄存器里面,实际生效以后存放在latched_jtag_ir中。
最后,移出的数据来自jtag_ir,而不是latched_jtag_ir。所以说latched_jtag_ir是送给device的,而从device来的数据是放在jtag_ir中的。但是,需要移出的数据暂时存放在instruction_tdo中,最终移到tap外面的数据(tdo)并不一定是instruction_tdo,还有其他很多来源。这个后面会看清楚。
d,read IDCODE
上面,我们解释过IDCODE的作用,那么怎么才能读到IDCODE呢,还是“以物易物”的思想,代码如下:
/**********************************************************************************
* *
* idcode logic *
* *
**********************************************************************************/
reg [31:0] idcode_reg;
wire idcode_tdo;
always @ (posedge tck_pad_i or negedge trstn_pad_i)
begin
if(trstn_pad_i == 0)
idcode_reg <= `IDCODE_VALUE; // IDCODE selected after reset
else if (test_logic_reset)
idcode_reg <= `IDCODE_VALUE; // IDCODE selected after reset
else if(idcode_select & capture_dr)
idcode_reg <= `IDCODE_VALUE;
else if(idcode_select & shift_dr)
idcode_reg <= {tdi_pad_i, idcode_reg[31:1]};
end
assign idcode_tdo = idcode_reg[0]; // This is latched on a negative TCK edge after the output MUX
/**********************************************************************************
* *
* End: idcode logic *
* *
**********************************************************************************/
读IDCODE的过程和写指令的过程相同,不同在于向tap写指令是不用关心tap移出的内容(0101),但读IDCODE,不用关心向tap移入的内容,关心的是tap移出的内容(IDCODE)。
e,bypass
adv_dbg_if在使用时,和他在一条jtag chain上的设备必须全部bypass,否则,数据就到不了adv_dbg_if,也就无法工作。这个很好理解,jtag chain,顾名思义,就是一条链,就好像打电话时的总机和分机。如果你想给某个分机打电话的话,那么总机肯定不能接,也就是总机bypass。
jtag_tap 工作在bypass模式是时,一个耳朵进,一个耳朵出,唯一的影响是会造成1个cycle的延迟。
代码如下:
/**********************************************************************************
* *
* Bypass logic *
* *
**********************************************************************************/
wire bypassed_tdo;
reg bypass_reg; // This is a 1-bit register
always @ (posedge tck_pad_i or negedge trstn_pad_i)
begin
if (trstn_pad_i == 0)
bypass_reg <= 1'b0;
else if (test_logic_reset == 1)
bypass_reg <= 1'b0;
else if (bypass_select & capture_dr)
bypass_reg<= 1'b0;
else if(bypass_select & shift_dr)
bypass_reg<= tdi_pad_i;
end
assign bypassed_tdo = bypass_reg; // This is latched on a negative TCK edge after the output MUX
/**********************************************************************************
* *
* End: Bypass logic *
* *
**********************************************************************************/
f,mux output
tap扮演着多个device(分机)的总机的角色。当公司内部的分机有很多,但总机只有一个。所以总机需要有多路选择器的功能。
代码如下:
/**********************************************************************************
* *
* Multiplexing TDO data *
* *
**********************************************************************************/
reg tdo_mux_out; // really just a wire
always @ (shift_ir or instruction_tdo or latched_jtag_ir or idcode_tdo or
debug_tdo_i or bs_chain_tdo_i or mbist_tdo_i or bypassed_tdo or
bs_chain_tdo_i)
begin
if(shift_ir)
tdo_mux_out = instruction_tdo;
else
begin
case(latched_jtag_ir) // synthesis parallel_case
`IDCODE: tdo_mux_out = idcode_tdo; // Reading ID code
`DEBUG: tdo_mux_out = debug_tdo_i; // Debug
`SAMPLE_PRELOAD: tdo_mux_out = bs_chain_tdo_i; // Sampling/Preloading
`EXTEST: tdo_mux_out = bs_chain_tdo_i; // External test
`MBIST: tdo_mux_out = mbist_tdo_i; // Mbist test
default: tdo_mux_out = bypassed_tdo; // BYPASS instruction
endcase
end
end
// TDO changes state at negative edge of TCK
always @ (negedge tck_pad_i)
begin
tdo_pad_o = tdo_mux_out;
end
// Tristate control for tdo_pad_o pin
always @ (posedge tck_pad_i)
begin
tdo_padoe_o <= shift_ir | shift_dr;
end
/**********************************************************************************
* *
* End: Multiplexing TDO data *
* *
**********************************************************************************/
4,jtag_tap的使用
要想使用jtag_tap,需要相应的驱动程序,才行。驱动的作用就是根据FSM的定义,以及命令格式,以及adv_dbg_if的实现,来操作jtag的4根线,达到某种目的。在adv_debug_sys的adv_jtag_bridge中的chain_commamds.c中有相关函数,代码如下:
//////////////////////////////////////////////////////////////////////
// Functions which operate on the JTAG TAP
/* Resets JTAG - Writes TRST=1, and TRST=0. Sends 8 TMS to put the TAP
* in test_logic_reset mode, for good measure.
*/
int tap_reset(void) {
int i;
int err = APP_ERR_NONE;
debug("\nreset(");
err |= jtag_write_bit(0);
JTAG_RETRY_WAIT();
/* In case we don't have TRST reset it manually */
for(i = 0; i < 8; i++) err |= jtag_write_bit(TMS);
err |= jtag_write_bit(TRST); // if TRST not supported, this puts us in test logic/reset
JTAG_RETRY_WAIT();
err |= jtag_write_bit(0); // run test / idle
debug(")\n");
// Reset data on current module/register selections
current_chain = -1;
// (this is only for the adv. debug i/f...bit of a kludge)
for(i = 0; i < DBG_MAX_MODULES; i++)
current_reg_idx[i] = -1;
return err;
}
// Set the IR with the DEBUG command, one way or the other
int tap_enable_debug_module(void)
{
uint32_t data;
int err = APP_ERR_NONE;
if(global_altera_virtual_jtag) {
/* Set for virtual IR shift */
err |= tap_set_ir(vjtag_cmd_vir); // This is the altera virtual IR scan command
err |= jtag_write_bit(TMS); /* SELECT_DR SCAN */
err |= jtag_write_bit(0); /* CAPTURE_DR */
err |= jtag_write_bit(0); /* SHIFT_DR */
/* Select debug scan chain in virtual IR */
data = (0x1<<ALT_VJTAG_IR_SIZE)|ALT_VJTAG_CMD_DEBUG;
err |= jtag_write_stream(&data, (ALT_VJTAG_IR_SIZE+1), 1); // EXIT1_DR
err |= jtag_write_bit(TMS); /* UPDATE_DR */
err |= jtag_write_bit(0); /* IDLE */
// This is a command to set an altera device to the "virtual DR shift" command
err |= tap_set_ir(vjtag_cmd_vdr);
}
else {
/* select debug scan chain and stay in it forever */
err |= tap_set_ir(global_jtag_cmd_debug);
}
return err;
}
/* Moves a value into the TAP instruction register (IR)
* Includes adjustment for scan chain IR length.
*/
uint32_t *ir_chain = NULL;
int tap_set_ir(int ir) {
int chain_size;
int chain_size_words;
int i;
int startoffset, startshift;
int err = APP_ERR_NONE;
// Adjust desired IR with prefix, postfix bits to set other devices in the chain to BYPASS
chain_size = global_IR_size + global_IR_prefix_bits + global_IR_postfix_bits;
chain_size_words = (chain_size/32)+1;
if(ir_chain == NULL) { // We have no way to know in advance how many bits there are in the combined IR register
ir_chain = (uint32_t *) malloc(chain_size_words * sizeof(uint32_t));
if(ir_chain == NULL)
return APP_ERR_MALLOC;
}
for(i = 0; i < chain_size_words; i++)
ir_chain[i] = 0xFFFFFFFF; // Set all other devices to BYPASS
// Copy the IR value into the output stream
startoffset = global_IR_postfix_bits/32;
startshift = (global_IR_postfix_bits - (startoffset*32));
ir_chain[startoffset] &= (ir << startshift);
ir_chain[startoffset] |= ~(0xFFFFFFFF << startshift); // Put the 1's back in the LSB positions
ir_chain[startoffset] |= (0xFFFFFFFF << (startshift + global_IR_size)); // Put 1's back in MSB positions, if any
if((startshift + global_IR_size) > 32) { // Deal with spill into the next word
ir_chain[startoffset+1] &= ir >> (32-startshift);
ir_chain[startoffset+1] |= (0xFFFFFFFF << (global_IR_size - (32-startshift))); // Put the 1's back in the MSB positions
}
// Do the actual JTAG transaction
debug("Set IR 0x%X\n", ir);
err |= jtag_write_bit(TMS); /* SELECT_DR SCAN */
err |= jtag_write_bit(TMS); /* SELECT_IR SCAN */
err |= jtag_write_bit(0); /* CAPTURE_IR */
err |= jtag_write_bit(0); /* SHIFT_IR */
/* write data, EXIT1_IR */
debug("Setting IR, size %i, IR_size = %i, pre_size = %i, post_size = %i, data 0x%X\n", chain_size, global_IR_size, global_IR_prefix_bits, global_IR_postfix_bits, ir);
err |= cable_write_stream(ir_chain, chain_size, 1); // Use cable_ call directly (not jtag_), so we don't add DR prefix bits
debug("Done setting IR\n");
err |= jtag_write_bit(TMS); /* UPDATE_IR */
err |= jtag_write_bit(0); /* IDLE */
current_chain = -1;
return err;
}
// This assumes we are in the IDLE state, and we want to be in the SHIFT_DR state.
int tap_set_shift_dr(void)
{
int err = APP_ERR_NONE;
err |= jtag_write_bit(TMS); /* SELECT_DR SCAN */
err |= jtag_write_bit(0); /* CAPTURE_DR */
err |= jtag_write_bit(0); /* SHIFT_DR */
return err;
}
// This transitions from EXIT1 to IDLE. It should be the last thing called
// in any debug unit transaction.
int tap_exit_to_idle(void)
{
int err = APP_ERR_NONE;
err |= jtag_write_bit(TMS); /* UPDATE_DR */
err |= jtag_write_bit(0); /* IDLE */
return err;
}
////////////////////////////////////////////////////////////////////
// Operations to read / write data over JTAG
/* Writes TCLK=0, TRST=1, TMS=bit1, TDI=bit0
and TCLK=1, TRST=1, TMS=bit1, TDI=bit0
*/
int jtag_write_bit(uint8_t packet) {
debug("Wbit(%i)\n", packet);
return cable_write_bit(packet);
}
int jtag_read_write_bit(uint8_t packet, uint8_t *in_bit) {
int retval = cable_read_write_bit(packet, in_bit);
debug("RWbit(%i,%i)", packet, *in_bit);
return retval;
}
// This automatically adjusts for the DR length (other devices on scan chain)
// when the set_TMS flag is true.
int jtag_write_stream(uint32_t *out_data, int length_bits, unsigned char set_TMS)
{
int i;
int err = APP_ERR_NONE;
if(!set_TMS)
err |= cable_write_stream(out_data, length_bits, 0);
else if(global_DR_prefix_bits == 0)
err |= cable_write_stream(out_data, length_bits, 1);
else {
err |= cable_write_stream(out_data, length_bits, 0);
// It could be faster to do a cable_write_stream for all the prefix bits (if >= 8 bits),
// but we'd need a data array of unknown (and theoretically unlimited)
// size to hold the 0 bits to write. TODO: alloc/realloc one.
for(i = 0; i < (global_DR_prefix_bits-1); i++)
err |= jtag_write_bit(0);
err |= jtag_write_bit(TMS);
}
return err;
}
// When set_TMS is true, this function insures the written data is in the desired position (past prefix bits)
// before sending TMS. When 'adjust' is true, this function insures that the data read in accounts for postfix
// bits (they are shifted through before the read starts).
int jtag_read_write_stream(uint32_t *out_data, uint32_t *in_data, int length_bits, unsigned char adjust, unsigned char set_TMS)
{
int i;
int err = APP_ERR_NONE;
if(adjust && (global_DR_postfix_bits > 0)) {
// It would be faster to do a cable_write_stream for all the postfix bits,
// but we'd need a data array of unknown (and theoretically unlimited)
// size to hold the '0' bits to write.
for(i = 0; i < global_DR_postfix_bits; i++)
err |= cable_write_bit(0);
}
// If there are both prefix and postfix bits, we may shift more bits than strictly necessary.
// If we shifted out the data while burning through the postfix bits, these shifts could be subtracted
// from the number of prefix shifts. However, that way leads to madness.
if(!set_TMS)
err |= cable_read_write_stream(out_data, in_data, length_bits, 0);
else if(global_DR_prefix_bits == 0)
err |= cable_read_write_stream(out_data, in_data, length_bits, 1);
else {
err |= cable_read_write_stream(out_data, in_data, length_bits, 0);
// It would be faster to do a cable_write_stream for all the prefix bits,
// but we'd need a data array of unknown (and theoretically unlimited)
// size to hold the '0' bits to write.
for(i = 0; i < (global_DR_prefix_bits-1); i++)
err |= jtag_write_bit(0);
err |= jtag_write_bit(TMS);
}
return err;
}
// This function attempts to determine the structure of the JTAG chain
// It can determine how many devices are present.
// If the devices support the IDCODE command, it will be read and stored.
// There is no way to automatically determine the length of the IR registers -
// this must be read from a BSDL file, if IDCODE is supported.
// When IDCODE is not supported, IR length of the target device must be entered on the command line.
#define ALLOC_SIZE 64
#define MAX_DEVICES 1024
int jtag_enumerate_chain(uint32_t **id_array, int *num_devices)
{
uint32_t invalid_code = 0x7f; // Shift this out, we know we're done when we get it back
const unsigned int done_code = 0x3f; // invalid_code is altered, we keep this for comparison (minus the start bit)
int devindex = 0; // which device we are currently trying to detect
uint32_t tempID;
uint32_t temp_manuf_code;
uint32_t temp_rest_code;
uint8_t start_bit = 0;
uint32_t *idcodes;
int reallocs = 0;
int err = APP_ERR_NONE;
// Malloc a reasonable number of entries, we'll expand if we must. Linked lists are overrated.
idcodes = (uint32_t *) malloc(ALLOC_SIZE*sizeof(uint32_t));
if(idcodes == NULL) {
printf("Failed to allocate memory for device ID codes!\n");
return APP_ERR_MALLOC;
}
// Put in SHIFT-DR mode
err |= jtag_write_bit(TMS); /* SELECT_DR SCAN */
err |= jtag_write_bit(0); /* CAPTURE_DR */
err |= jtag_write_bit(0); /* SHIFT_DR */
printf("Enumerating JTAG chain...\n");
// Putting a limit on the # of devices supported has the useful side effect
// of insuring we still exit in error cases (we never get the 0x7f manuf. id)
while(devindex < MAX_DEVICES) {
// get 1 bit. 0 = BYPASS, 1 = start of IDCODE
err |= jtag_read_write_bit(invalid_code&0x01, &start_bit);
invalid_code >>= 1;
if(start_bit == 0) {
if(devindex >= (ALLOC_SIZE << reallocs)) { // Enlarge the memory array if necessary, double the size each time
idcodes = (uint32_t *) realloc(idcodes, (ALLOC_SIZE << ++reallocs)*sizeof(uint32_t));
if(idcodes == NULL) {
printf("Failed to allocate memory for device ID codes during enumeration!\n");
return APP_ERR_MALLOC;
}
}
idcodes[devindex] = -1;
devindex++;
}
else {
// get 11 bit manufacturer code
err |= jtag_read_write_stream(&invalid_code, &temp_manuf_code, 11, 0, 0);
invalid_code >>= 11;
if(temp_manuf_code != done_code) {
// get 20 more bits, rest of ID
err |= jtag_read_write_stream(&invalid_code, &temp_rest_code, 20, 0, 0);
invalid_code >>= 20;
tempID = (temp_rest_code << 12) | (temp_manuf_code << 1) | 0x01;
if(devindex >= (ALLOC_SIZE << reallocs)) { // Enlarge the memory array if necessary, double the size each time
idcodes = (uint32_t *) realloc(idcodes, (ALLOC_SIZE << ++reallocs)*sizeof(unsigned long));
if(idcodes == NULL) {
printf("Failed to allocate memory for device ID codes during enumeration!\n");
return APP_ERR_MALLOC;
}
}
idcodes[devindex] = tempID;
devindex++;
} else {
break;
}
}
if(err) // Don't try to keep probing if we get a comm. error
return err;
}
if(devindex >= MAX_DEVICES)
printf("WARNING: maximum supported devices on JTAG chain (%i) exceeded.\n", MAX_DEVICES);
// Put in IDLE mode
err |= jtag_write_bit(TMS); /* EXIT1_DR */
err |= jtag_write_bit(TMS); /* UPDATE_DR */
err |= jtag_write_bit(0); /* IDLE */
*id_array = idcodes;
*num_devices = devindex;
return err;
}
int jtag_get_idcode(uint32_t cmd, uint32_t *idcode)
{
uint32_t data_out = 0;
int err = APP_ERR_NONE;
unsigned char saveconfig = global_altera_virtual_jtag;
global_altera_virtual_jtag = 0; // We want the actual IDCODE, not the virtual device IDCODE
err |= tap_set_ir(cmd);
err |= tap_set_shift_dr();
err |= jtag_read_write_stream(&data_out, idcode, 32, 1, 1); /* EXIT1_DR */
if(err)
printf("Error getting ID code!\n");
// Put in IDLE mode
err |= jtag_write_bit(TMS); /* UPDATE_DR */
err |= jtag_write_bit(0); /* IDLE */
global_altera_virtual_jtag = saveconfig;
return err;
}
/////////////////////////////////////////////////////////////////
// Helper functions
/* counts retries and returns zero if we should abort */
/* TODO: dynamically adjust timings */
int retry_do() {
int err = APP_ERR_NONE;
if (soft_retry_no >= NUM_SOFT_RETRIES) {
return 0;
// *** TODO: Add a 'hard retry', which re-initializes the cable, re-enumerates the bus, etc.
} else { /* quick reset */
if(err |= tap_reset()) {
printf("Error %s while resetting for retry.\n", get_err_string(err));
return 0;
}
// Put us back into DEBUG mode
if(err |= tap_enable_debug_module()) {
printf("Error %s enabling debug module during retry.\n", get_err_string(err));
return 0;
}
soft_retry_no++;
printf("Retry...\n");
}
return 1;
}
5,小结
本小节我们分析了advanced debug system中的jtag_tap模块的具体实现。用一句话来概括的话就是,JTAG就是类似SPI总线的一种总线,jtag_tap就相当于SPI总线的arbiter。