- 通达信 强势突破战法:百战百成 量价齐升+均线多头擒牛指标幅图指标
q125500612
通达信指标通达信指标
指标用法详解核心逻辑该指标旨在筛选强势突破+量价齐升+趋势向上的个股,适用于短线或波段交易策略。一、趋势判断条件均线系统股价开盘低于20日/40日/60日均线(短期调整后蓄势)收盘价突破20/40/60日均线的最高值(确认趋势反转)5/10/30/60/120日均线呈多头排列(开盘在最低均线下,收盘站上最高均线,代表短期强势)EXPMA趋势强化股价站稳50日EXPMA(指数平滑均线)上方50日EX
- 使用 SQLite 和 Brighter 实现发件箱模式
actor_dev
c#.netbrightersqlite
简介本指南演示如何使用SQLite和.NET8,结合Brighter库实现**发件箱模式(OutboxPattern)**,以确保数据库更新与消息发布之间的事务一致性。项目目标处理CreateNewOrder命令,在事务成功时发布两个事件(OrderPlaced,OrderPaid)。如果发生错误(例如业务规则冲突),则回滚数据库更改和消息发布。要求.NET8+使用Podman(或Docker)运
- Elixir 中的状态管理:进程、Agent 与 GenServer 实践
actor_dev
elixirerlangstate
简介当我第一次学习Elixir时,我曾困惑于如何管理状态。与通过可变全局变量实现状态管理的命令式语言不同,Elixir的不可变数据模型和基于BEAM虚拟机的并发设计要求采用不同的方法。本文将探讨Elixir中状态的处理方式。上下文:BEAM虚拟机与并发Elixir运行在专为高并发和容错设计的BEAM虚拟机上。受Actor模型启发,BEAM将进程视为通过消息传递通信的轻量级实体。由于数据不可变,状态
- 使用 MySQL 和 Brighter 实现出站箱模式
actor_dev
.netc#brighterrabbitmqmysql发件箱模式
简介本指南演示了如何使用Brighter库在MySQL和.NET8中实现Outbox模式(出站箱模式),以确保数据库更新和消息发布之间的事务一致性。项目目标处理一个CreateNewOrder命令,并且只有在事务成功时才发布两个事件(OrderPlaced,OrderPaid)。如果发生错误(例如业务规则冲突),则数据库更改和消息发布都将回滚。要求.NET8+Podman(或Docker)运行本地
- Java线程池任务停止机制全面指南:优雅终止与强制中断
Java线程池任务停止机制全面指南:优雅终止与强制中断一、线程池任务停止概述在Java并发编程中,线程池任务的停止是一个需要谨慎处理的问题。不当的任务停止方式可能导致数据不一致、资源泄漏等问题。本文将深入探讨Java线程池中各种任务停止的方法和最佳实践。1.1为什么需要关注任务停止资源管理:避免线程和资源泄漏系统稳定性:防止任务意外中断导致系统状态异常响应性:快速响应系统关闭或配置变更需求数据一致
- 信创适配实践:ARM64 架构 KylinOS 系统下 Docker 部署 Nginx 及跨架构数据迁移全攻略
H03004
架构dockernginx
目录一、信创背景与实践价值二、环境筹备:ARM64+KylinOS基础配置(一)系统预检:锁定架构与版本(二)Docker安装:适配KylinOS的踩坑指南1.依赖预处理(解决KylinOS源差异)2.配置ARM64专属镜像源3.安装与加速优化4.验证安装三、Nginx容器全流程:从镜像到运维(一)镜像选择:ARM64适配的核心逻辑(二)容器启动:参数解析与权限踩坑1.启动命令(含持久化挂载)2.
- 【EI会议征稿】东北大学主办第三届机器视觉、图像处理与影像技术国际会议(MVIPIT 2025)
诗远Yolanda
图像处理计算机视觉考研视频机器学习论文阅读
一、会议信息大会官网:www.mvipit.org官方邮箱:
[email protected]会议地点:辽宁沈阳主办单位:东北大学会议时间:2025年9月27日-9月29日二、征稿主题集中但不限于“机器视觉、图像处理与影像技术”等其他相关主题。机器视觉:视觉中的统计机器学习;立体视觉标定;几何建模与处理;人脸识别与手势识别;早期视觉和生物学启发的视觉;光流法和运动追踪;图像分割和图像分类;基于模型的视觉
- Sentinel 授权规则详解与自定义异常处理
述雾学java
SpringCloudsentinel
Sentinel授权规则详解与自定义异常处理在微服务系统中,权限控制和访问保护是至关重要的一环。本文将详细介绍如何通过Sentinel的授权规则(AuthorityRule)控制资源访问权限,并结合实际案例说明如何设置白名单与黑名单,以及如何实现自定义异常返回,提升系统的稳定性与用户体验。一、Sentinel授权规则授权规则用于对资源进行访问权限控制,其核心思想是:给指定资源配置“流控应用”,然后
- Python3爬虫笔记 -- urllib
Alst0n
PythonPython3urlliburllib.request
urllib库是Python内置的HTTP请求库,不需要额外安装。它包含如下4个模块:request:HTTP请求模块error:异常处理模块parse:提供URL处理方法,包括拆分、解析、合并等robotparser:识别网站等robot.txt文件1、urllib.request发送请求连接URL,获取返回页面的源代码;默认请求方式为GETimporturllib.requestrespons
- Python网络爬虫---urllib库介绍
db_hsk_2099
python爬虫开发语言
1·urllib库简介·用途:urllib库是python的标准库之一,是python内置的HTTP请求库,用于发送HTTP/FTP请求,它可以看作处理URL的组件集合。·特点:简单易用,支持HTTP、HTTPS、FTP等协议。2.urllib库包含4大模块:目录:(1)urllib.request(2)urllib.parse(3)urllib.error(4)urllib.robotparse
- (全网最全,打光测试解决高反光产品)在机器视觉2D中,遇到高反光产品打光测试怎么办?
苏州大视通机器视觉
杂说科技人工智能计算机视觉opencv
关键原则:优先从物理层面消除反光(光源/光学),算法作为补充。偏振方案成本通常低于更换光源,且效果显著,建议优先尝试。在机器视觉打光测试中出现反光问题会严重影响图像质量,导致特征模糊、边缘丢失或检测失败。以下是系统性的解决方案,可根据实际情况组合应用:一、调整光源方案改变光源角度斜射照明:避免光源直射反光区域(如30°-60°环光、条形光侧打)。同轴光优化:对镜面物体改用低角度环形光(如<15°)
- [Python] -基础篇6-Python中的字符串处理技巧合集
踏雪无痕老爷子
Pythonpython开发语言
Python中的字符串类型是非常常用的基础类型。不管是处理文本、数据分析,还是系统管理等场景,都不能离开字符串的操作。本文将分类整理Python字符串的常用技巧和方法,帮助你接地气地接触字符串处理的本质。1.基础操作1.1字符串切片s="Hello,Python!"print(s[0:5])#Helloprint(s[-7:])#Python!1.2字符串连接和处理name="Alice"gree
- InnoDB 索引数据结构的详解
lanbing
Mysql数据结构mysql
InnoDB存储引擎的索引结构基于B+树(B+Tree),这是其核心特性之一。B+树的设计结合了磁盘存储特性和数据库查询需求,能够高效地处理大规模数据的查找、插入、删除和范围查询操作。以下是InnoDB索引数据结构的详细说明:1.B+树的结构特点B+树是一种自平衡的多路搜索树,其核心特性如下:所有数据存储在叶子节点:B+树的非叶子节点仅存储键值(Key)和子节点指针,而实际的数据(记录)只存在于叶
- 外观模式 - Flutter中的一键操作大师,复杂功能的极简入口!
明似水
flutter外观模式flutterjavascript
痛点场景:多步骤的用户注册流程假设你的应用需要处理以下注册步骤:验证邮箱格式检查密码强度调用注册API保存用户Token初始化用户配置同步基础数据发送欢迎邮件传统实现方式:FutureregisterUser(Stringemail,Stringpassword)async{//1.验证邮箱if(!EmailValidator.validate(email)){throwInvalidEmailE
- Cortex-A9解码H265遇到的程序崩溃问题
melonbo
FFMPEGffmpeg
1、应用背景处理器采用Cortex-A9,从网络摄像机拉取RTSP视频流,编码格式为H265,在打开rtsp视频流时有小概率出现程序崩溃的问题。2、分析根据coredump文件显示,问题出现在hevcdsp_sao_neon.s文件,它的作用是优化HEVC视频编码器的性能,特别是在处理视频帧时,通过NEON指令集实现的并行处理能力,可以显著提高视频编码的速度。ARMNEON指令集是ARM平台上的S
- RK3288解码视频时遇到的奇葩问题
melonbo
百问-音视频音视频
1、亮线问题用rk3288做视频显示,qt界面是1024x768,在切换视频源时,屏幕偶尔会出现亮线,位置在屏幕的正中间。解决方法是将qt的界面设置为1023x767,完美解决。2、亮点rk3288在解码显示h264视频时,界面的图像会出现斑驳的亮点,不仔细看还看不出来,出现的亮点有的在视频图像上,有的在qt界面上。解决方法是在现实图像界面前,先用ffplay播放一个全屏的画面,然后再显示程序的界
- 音频采样数据格式
melonbo
百问-音视频音视频
音频信号在模拟到数字转换时,会涉及到多个关键参数,如采样率、位深度、通道数等。下面是常见的音频采样数据格式及其相关概念:1.采样率(SampleRate)采样率指的是每秒钟对音频信号进行采样的次数,单位为赫兹(Hz)。常见的值如下:44.1kHz:常用于音频CD和大多数音乐文件格式(如WAV、MP3)。48kHz:常用于专业音频录制、电影和视频音频处理。96kHz、192kHz:常用于高保真音频(
- LangGraph 多智能体系统深度解析:从监督式到群体式架构实战
佑瞻
LangGraphLangChainlanggraph
在智能体开发过程中,我们常常会遇到这样的困境:当单个智能体需要同时处理多个领域的任务(如同时管理航班预订和酒店预订)时,其处理效率和专业性会大幅下降。是让单个智能体强行兼容多领域?还是寻找更合理的架构方案?今天我们就来聊聊LangGraph中的多智能体系统,看看如何通过分解任务到独立智能体,再组合成高效协作的系统,解决这一现实挑战。一、多智能体系统的核心概念与优势1.1为什么需要多智能体系统想象一
- HTML之常用基础标签
AA-代码批发V哥
HTMLhtml前端
HTML之常用基础标签一、HTML文档基本结构标签1.``标签2.``标签3.``标签二、文本相关基础标签1.标题标签(``-``)2.段落标签(``)3.换行标签(``)4.强调标签(``和``)5.代码标签(``、``等)三、链接相关基础标签1.超链接标签(``)2.图像标签(``)四、列表相关基础标签1.无序列表(``和``)2.有序列表(``和``)3.自定义列表(``、``和``)五、表
- 如何进行 iOS App 混淆加固?IPA 加壳与资源保护实战流程
2501_91600747
httpudphttpswebsocket网络安全网络协议tcp/ip
在日常iOS开发中,应用打包完成后,如何对成品IPA文件进行安全加固,一直是很多团队关注的重点。尤其是当源码无法提供、或交付时间紧张的情况下,直接对IPA文件进行处理成为一种可行且高效的方案。以下是一套我们在实际项目中使用过的IPA级别混淆与资源保护流程,每一步都使用了不同工具协同完成,通过工具组合来覆盖各个安全角度。实战流程总览静态扫描→类与符号提取→代码混淆与重命名→资源文件处理→重签名测试工
- ffmpeg下载地址
珊珊而川
ffmpeg
你已经通过pipinstallffmpeg安装了一个名为ffmpeg的Python包,但这并不等于你真正安装了系统级别的FFmpeg可执行程序,而roop的代码是通过调用系统的ffmpeg命令行工具来处理视频的。问题分析你遇到的报错:[ROOP.CORE]ffmpegisnotinstalled.说明roop在运行时检查系统中是否能调用ffmpeg,而不是是否安装了Python包ffmpeg。✅解
- SDL2渲染RGB图像
qq_52484093
音视频音视频
SDL的相关函数使用SDL渲染RGB图像#include#include#include#undefmain#pragmacomment(lib,"SDL2.lib")usingnamespacestd;intmain(){constintw=800;constinth=600;//1.初始化SDLVideo库if(SDL_Init(SDL_INIT_VIDEO)){coutpixels(newu
- SDL渲染应用(1)
好想吃杏干
音视频开发应用c++
SDL渲染应用(1)基本流程案例一:使用SDL渲染一幅RGB图像数据#include#include#pragmacomment(lib,"SDL2.lib")#undefmain()usingnamespacestd;intmain(intargc,char*argv[]){/*1.创建窗口的大小*/intw=800;inth=600;/*初始SDLvideio库,并判断是初始化成功返回0视为成
- SDL渲染一幅图像
环境配置下载源码:http://www.libsdl.org/download-2.0.php进入到SDL2-2.0.14\VisualC用visualstudio2019打开SDL.sln将工程升级到vs2019选择对的,debug|releasex64|x86进行编译生成相应的.dll、.pdb和.lib然后将对应的.dll、.pdb和.lib放到对应目录中,并配置值相应的工程目录API介绍1
- 从零开始:Python实现语音识别的完整教程_副本
AIGC应用创新大全
AI大模型与大数据技术AI人工智能与大数据应用开发MCP&Agent云算力网络python语音识别开发语言ai
从零开始:Python实现语音识别的完整教程关键词:Python、语音识别、语音转文本、音频处理、机器学习、深度学习、自然语言处理摘要:本文将带你从零开始学习如何使用Python实现语音识别功能。我们将从基础概念讲起,逐步深入到实际代码实现,涵盖音频处理、特征提取、模型训练等关键环节,最终构建一个完整的语音识别系统。无论你是初学者还是有一定经验的开发者,都能从本教程中获得实用的知识和技能。背景介绍
- markdown语法教学
7忆--栅
markdownvscode笔记visualstudiocode其他
目录1.文章前面的目录生成2.标题3.字体3.1、字体的斜体/粗体/...3.2、字体的颜色3.3、字体的格式3.4、字体的大小3.5、文本注音3.6、文本高亮显示3.7、添加背景颜色附1:颜色+格式+大小+高亮+注音合体附2:颜色+格式+大小+背景颜色+注音合体4.引用5.分割线6.删除线7.下划线8.代码块9.公式块10.列表10.1、有序列表10.2、无序列表11.待办事项12.特殊符号13
- 从零开始:用Python构建AI语音识别应用的完整指南
AI大模型应用之禅
人工智能python语音识别ai
从零开始:用Python构建AI语音识别应用的完整指南关键词:Python语音识别、AI语音处理、语音转文本、SpeechRecognition库、端到端模型摘要:本文从0到1带您掌握用Python构建AI语音识别应用的全流程。我们将用“给小学生讲故事”的方式,拆解语音识别的核心概念(如音频采集、特征提取、模型解码),结合代码实战(从调用API到自定义模型),并覆盖环境搭建、常见问题和未来趋势。无
- 爬虫实战之图片及人物信息爬取
nightunderblackcat
Python进阶爬虫python
爬虫对于许多Python初学者来说都是一个好玩有趣的技能,但大多数人都是从网上得来的经验,会认为学习爬虫是件很难的事,像处理反爬机制以及反反爬,总是让人望而却步,今天我们来进行爬虫实操,需要注意爬虫本身并不违法,但恶意爬取文件将会涉及相关法律,为避免不必要的纠纷,本文采取一个不存在的网站进行演示,本文适合Python初学者以及爬虫初学者学习,博主是大一.所以讲的话和相关技能并不特别专业,望大家谅解
- 面向大语言模型幻觉的关键数据集:系统性综述与分类法
致Great
语言模型人工智能自然语言处理
面向大语言模型幻觉的关键数据集:系统性综述与分类法摘要大语言模型(LargeLanguageModels,LLMs)在自然语言处理的多个领域取得了革命性进展,但其固有的“幻觉”问题——即生成看似合理但与事实不符或与上下文无关的内容——严重制约了其在关键应用中的可靠性与安全性。为了系统性地评估、理解并缓解LLM的幻觉现象,学术界和工业界开发了大量多样化的数据集与基准。本文对大模型幻觉领域的关键数据集
- Oracle 进阶语法实战:从多维分析到数据清洗的深度应用(第四课)
AI、少年郎
oracle数据库
在《Oracle树形统计再进阶》(第三课)基础上,我们跳出传统SQL聚合框架,探索Oracle特有的高级语法特性,包括多维分析神器MODEL子句、数据清洗利器正则表达式、PL/SQL存储过程优化,以及基于执行计划的查询调优技巧。这些技术能解决传统方法难以处理的复杂场景,如动态列生成、不规则数据清洗、批量数据处理等。一、MODEL子句:多维数据建模与动态透视业务场景:动态生成各部门全年度各季度请假类
- Java开发中,spring mvc 的线程怎么调用?
小麦麦子
springmvc
今天逛知乎,看到最近很多人都在问spring mvc 的线程http://www.maiziedu.com/course/java/ 的启动问题,觉得挺有意思的,那哥们儿问的也听仔细,下面的回答也很详尽,分享出来,希望遇对遇到类似问题的Java开发程序猿有所帮助。
问题:
在用spring mvc架构的网站上,设一线程在虚拟机启动时运行,线程里有一全局
- maven依赖范围
bitcarter
maven
1.test 测试的时候才会依赖,编译和打包不依赖,如junit不被打包
2.compile 只有编译和打包时才会依赖
3.provided 编译和测试的时候依赖,打包不依赖,如:tomcat的一些公用jar包
4.runtime 运行时依赖,编译不依赖
5.默认compile
依赖范围compile是支持传递的,test不支持传递
1.传递的意思是项目A,引用
- Jaxb org.xml.sax.saxparseexception : premature end of file
darrenzhu
xmlprematureJAXB
如果在使用JAXB把xml文件unmarshal成vo(XSD自动生成的vo)时碰到如下错误:
org.xml.sax.saxparseexception : premature end of file
很有可能时你直接读取文件为inputstream,然后将inputstream作为构建unmarshal需要的source参数。InputSource inputSource = new In
- CSS Specificity
周凡杨
html权重Specificitycss
有时候对于页面元素设置了样式,可为什么页面的显示没有匹配上呢? because specificity
CSS 的选择符是有权重的,当不同的选择符的样式设置有冲突时,浏览器会采用权重高的选择符设置的样式。
规则:
HTML标签的权重是1
Class 的权重是10
Id 的权重是100
- java与servlet
g21121
servlet
servlet 搞java web开发的人一定不会陌生,而且大家还会时常用到它。
下面是java官方网站上对servlet的介绍: java官网对于servlet的解释 写道
Java Servlet Technology Overview Servlets are the Java platform technology of choice for extending and enha
- eclipse中安装maven插件
510888780
eclipsemaven
1.首先去官网下载 Maven:
http://www.apache.org/dyn/closer.cgi/maven/binaries/apache-maven-3.2.3-bin.tar.gz
下载完成之后将其解压,
我将解压后的文件夹:apache-maven-3.2.3,
并将它放在 D:\tools目录下,
即 maven 最终的路径是:D:\tools\apache-mave
- jpa@OneToOne关联关系
布衣凌宇
jpa
Nruser里的pruserid关联到Pruser的主键id,实现对一个表的增删改,另一个表的数据随之增删改。
Nruser实体类
//*****************************************************************
@Entity
@Table(name="nruser")
@DynamicInsert @Dynam
- 我的spring学习笔记11-Spring中关于声明式事务的配置
aijuans
spring事务配置
这两天学到事务管理这一块,结合到之前的terasoluna框架,觉得书本上讲的还是简单阿。我就把我从书本上学到的再结合实际的项目以及网上看到的一些内容,对声明式事务管理做个整理吧。我看得Spring in Action第二版中只提到了用TransactionProxyFactoryBean和<tx:advice/>,定义注释驱动这三种,我承认后两种的内容很好,很强大。但是实际的项目当中
- java 动态代理简单实现
antlove
javahandlerproxydynamicservice
dynamicproxy.service.HelloService
package dynamicproxy.service;
public interface HelloService {
public void sayHello();
}
dynamicproxy.service.impl.HelloServiceImpl
package dynamicp
- JDBC连接数据库
百合不是茶
JDBC编程JAVA操作oracle数据库
如果我们要想连接oracle公司的数据库,就要首先下载oralce公司的驱动程序,将这个驱动程序的jar包导入到我们工程中;
JDBC链接数据库的代码和固定写法;
1,加载oracle数据库的驱动;
&nb
- 单例模式中的多线程分析
bijian1013
javathread多线程java多线程
谈到单例模式,我们立马会想到饿汉式和懒汉式加载,所谓饿汉式就是在创建类时就创建好了实例,懒汉式在获取实例时才去创建实例,即延迟加载。
饿汉式:
package com.bijian.study;
public class Singleton {
private Singleton() {
}
// 注意这是private 只供内部调用
private static
- javascript读取和修改原型特别需要注意原型的读写不具有对等性
bijian1013
JavaScriptprototype
对于从原型对象继承而来的成员,其读和写具有内在的不对等性。比如有一个对象A,假设它的原型对象是B,B的原型对象是null。如果我们需要读取A对象的name属性值,那么JS会优先在A中查找,如果找到了name属性那么就返回;如果A中没有name属性,那么就到原型B中查找name,如果找到了就返回;如果原型B中也没有
- 【持久化框架MyBatis3六】MyBatis3集成第三方DataSource
bit1129
dataSource
MyBatis内置了数据源的支持,如:
<environments default="development">
<environment id="development">
<transactionManager type="JDBC" />
<data
- 我程序中用到的urldecode和base64decode,MD5
bitcarter
cMD5base64decodeurldecode
这里是base64decode和urldecode,Md5在附件中。因为我是在后台所以需要解码:
string Base64Decode(const char* Data,int DataByte,int& OutByte)
{
//解码表
const char DecodeTable[] =
{
0, 0, 0, 0, 0, 0
- 腾讯资深运维专家周小军:QQ与微信架构的惊天秘密
ronin47
社交领域一直是互联网创业的大热门,从PC到移动端,从OICQ、MSN到QQ。到了移动互联网时代,社交领域应用开始彻底爆发,直奔黄金期。腾讯在过去几年里,社交平台更是火到爆,QQ和微信坐拥几亿的粉丝,QQ空间和朋友圈各种刷屏,写心得,晒照片,秀视频,那么谁来为企鹅保驾护航呢?支撑QQ和微信海量数据背后的架构又有哪些惊天内幕呢?本期大讲堂的内容来自今年2月份ChinaUnix对腾讯社交网络运营服务中心
- java-69-旋转数组的最小元素。把一个数组最开始的若干个元素搬到数组的末尾,我们称之为数组的旋转。输入一个排好序的数组的一个旋转,输出旋转数组的最小元素
bylijinnan
java
public class MinOfShiftedArray {
/**
* Q69 旋转数组的最小元素
* 把一个数组最开始的若干个元素搬到数组的末尾,我们称之为数组的旋转。输入一个排好序的数组的一个旋转,输出旋转数组的最小元素。
* 例如数组{3, 4, 5, 1, 2}为{1, 2, 3, 4, 5}的一个旋转,该数组的最小值为1。
*/
publ
- 看博客,应该是有方向的
Cb123456
反省看博客
看博客,应该是有方向的:
我现在就复习以前的,在补补以前不会的,现在还不会的,同时完善完善项目,也看看别人的博客.
我刚突然想到的:
1.应该看计算机组成原理,数据结构,一些算法,还有关于android,java的。
2.对于我,也快大四了,看一些职业规划的,以及一些学习的经验,看看别人的工作总结的.
为什么要写
- [开源与商业]做开源项目的人生活上一定要朴素,尽量减少对官方和商业体系的依赖
comsci
开源项目
为什么这样说呢? 因为科学和技术的发展有时候需要一个平缓和长期的积累过程,但是行政和商业体系本身充满各种不稳定性和不确定性,如果你希望长期从事某个科研项目,但是却又必须依赖于某种行政和商业体系,那其中的过程必定充满各种风险。。。
所以,为避免这种不确定性风险,我
- 一个 sql优化 ([精华] 一个查询优化的分析调整全过程!很值得一看 )
cwqcwqmax9
sql
见 http://www.itpub.net/forum.php?mod=viewthread&tid=239011
Web翻页优化实例
提交时间: 2004-6-18 15:37:49 回复 发消息
环境:
Linux ve
- Hibernat and Ibatis
dashuaifu
Hibernateibatis
Hibernate VS iBATIS 简介 Hibernate 是当前最流行的O/R mapping框架,当前版本是3.05。它出身于sf.net,现在已经成为Jboss的一部分了 iBATIS 是另外一种优秀的O/R mapping框架,当前版本是2.0。目前属于apache的一个子项目了。 相对Hibernate“O/R”而言,iBATIS 是一种“Sql Mappi
- 备份MYSQL脚本
dcj3sjt126com
mysql
#!/bin/sh
# this shell to backup mysql
#
[email protected] (QQ:1413161683 DuChengJiu)
_dbDir=/var/lib/mysql/
_today=`date +%w`
_bakDir=/usr/backup/$_today
[ ! -d $_bakDir ] && mkdir -p
- iOS第三方开源库的吐槽和备忘
dcj3sjt126com
ios
转自
ibireme的博客 做iOS开发总会接触到一些第三方库,这里整理一下,做一些吐槽。 目前比较活跃的社区仍旧是Github,除此以外也有一些不错的库散落在Google Code、SourceForge等地方。由于Github社区太过主流,这里主要介绍一下Github里面流行的iOS库。 首先整理了一份
Github上排名靠
- html wlwmanifest.xml
eoems
htmlxml
所谓优化wp_head()就是把从wp_head中移除不需要元素,同时也可以加快速度。
步骤:
加入到function.php
remove_action('wp_head', 'wp_generator');
//wp-generator移除wordpress的版本号,本身blog的版本号没什么意义,但是如果让恶意玩家看到,可能会用官网公布的漏洞攻击blog
remov
- 浅谈Java定时器发展
hacksin
java并发timer定时器
java在jdk1.3中推出了定时器类Timer,而后在jdk1.5后由Dou Lea从新开发出了支持多线程的ScheduleThreadPoolExecutor,从后者的表现来看,可以考虑完全替代Timer了。
Timer与ScheduleThreadPoolExecutor对比:
1.
Timer始于jdk1.3,其原理是利用一个TimerTask数组当作队列
- 移动端页面侧边导航滑入效果
ini
jqueryWebhtml5cssjavascirpt
效果体验:http://hovertree.com/texiao/mobile/2.htm可以使用移动设备浏览器查看效果。效果使用到jquery-2.1.4.min.js,该版本的jQuery库是用于支持HTML5的浏览器上,不再兼容IE8以前的浏览器,现在移动端浏览器一般都支持HTML5,所以使用该jQuery没问题。HTML文件代码:
<!DOCTYPE html>
<h
- AspectJ+Javasist记录日志
kane_xie
aspectjjavasist
在项目中碰到这样一个需求,对一个服务类的每一个方法,在方法开始和结束的时候分别记录一条日志,内容包括方法名,参数名+参数值以及方法执行的时间。
@Override
public String get(String key) {
// long start = System.currentTimeMillis();
// System.out.println("Be
- redis学习笔记
MJC410621
redisNoSQL
1)nosql数据库主要由以下特点:非关系型的、分布式的、开源的、水平可扩展的。
1,处理超大量的数据
2,运行在便宜的PC服务器集群上,
3,击碎了性能瓶颈。
1)对数据高并发读写。
2)对海量数据的高效率存储和访问。
3)对数据的高扩展性和高可用性。
redis支持的类型:
Sring 类型
set name lijie
get name lijie
set na
- 使用redis实现分布式锁
qifeifei
在多节点的系统中,如何实现分布式锁机制,其中用redis来实现是很好的方法之一,我们先来看一下jedis包中,有个类名BinaryJedis,它有个方法如下:
public Long setnx(final byte[] key, final byte[] value) {
checkIsInMulti();
client.setnx(key, value);
ret
- BI并非万能,中层业务管理报表要另辟蹊径
张老师的菜
大数据BI商业智能信息化
BI是商业智能的缩写,是可以帮助企业做出明智的业务经营决策的工具,其数据来源于各个业务系统,如ERP、CRM、SCM、进销存、HER、OA等。
BI系统不同于传统的管理信息系统,他号称是一个整体应用的解决方案,是融入管理思想的强大系统:有着系统整体的设计思想,支持对所有
- 安装rvm后出现rvm not a function 或者ruby -v后提示没安装ruby的问题
wudixiaotie
function
1.在~/.bashrc最后加入
[[ -s "$HOME/.rvm/scripts/rvm" ]] && source "$HOME/.rvm/scripts/rvm"
2.重新启动terminal输入:
rvm use ruby-2.2.1 --default
把当前安装的ruby版本设为默
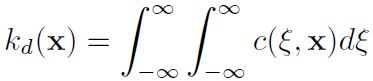
 ) 是输入像素值 (i.e.
) 是输入像素值 (i.e.  )的加权和 :
)的加权和 :
 称为 核, 它仅仅是一个加权系数。
称为 核, 它仅仅是一个加权系数。


和
必须是正奇数,否则将使用
和
参数来计算内核大小。
则
 : 颜色空间的标准方差
: 颜色空间的标准方差 : 坐标空间的标准方差(像素单位)
: 坐标空间的标准方差(像素单位)
 用来对结果进行单位化。
用来对结果进行单位化。

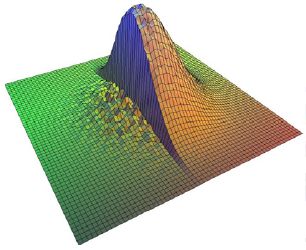
 同样用来对结果进行单位化。对两者进行结合即可以得到基于空间距离、相似程度综合考量的Bilateral滤波:
同样用来对结果进行单位化。对两者进行结合即可以得到基于空间距离、相似程度综合考量的Bilateral滤波:

 综合了两种高斯权重于一起而得到,其中的c与s计算可以详细描述如下:
综合了两种高斯权重于一起而得到,其中的c与s计算可以详细描述如下:





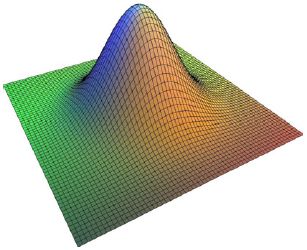



 就表示两个像素间的距离,比如当前像素与其右边紧邻的一个像素之间的距离我们就可以用
就表示两个像素间的距离,比如当前像素与其右边紧邻的一个像素之间的距离我们就可以用 来计算,也即两个二维向量{0 , 0}以及{0 , 1}之间的欧氏距离。直接计算一个区域上的高斯权重并单位化后就可以进行高斯模糊了。
来计算,也即两个二维向量{0 , 0}以及{0 , 1}之间的欧氏距离。直接计算一个区域上的高斯权重并单位化后就可以进行高斯模糊了。
 表示两个像素值之间的距离,可以直接使用其灰度值之间的差值或者RGB向量之间的欧氏距离。
表示两个像素值之间的距离,可以直接使用其灰度值之间的差值或者RGB向量之间的欧氏距离。