FFmpeg的HEVC解码器源代码简单分析:解析器(Parser)部分
=====================================================
HEVC源代码分析文章列表:
【解码 -libavcodec HEVC 解码器】
FFmpeg的HEVC解码器源代码简单分析:概述
FFmpeg的HEVC解码器源代码简单分析:解析器(Parser)部分
FFmpeg的HEVC解码器源代码简单分析:解码器主干部分
FFmpeg的HEVC解码器源代码简单分析:CTU解码(CTU Decode)部分-PU
FFmpeg的HEVC解码器源代码简单分析:CTU解码(CTU Decode)部分-TU
FFmpeg的HEVC解码器源代码简单分析:环路滤波(LoopFilter)
=====================================================
上篇文章概述了FFmpeg的libavcodec中HEVC(H.265)解码器的结构;从这篇文章开始,具体研究HEVC解码器的源代码。本文分析HEVC解码器中解析器(Parser)部分的源代码。这部分的代码用于分割HEVC的NALU,并且解析SPS、PPS、SEI等信息。解析HEVC码流(对应AVCodecParser结构体中的函数)和解码HEVC码流(对应AVCodec结构体中的函数)的时候都会调用该部分的代码完成相应的功能。
函数调用关系图
FFmpeg HEVC解析器(Parser)部分在整个HEVC解码器中的位置如下图所示。
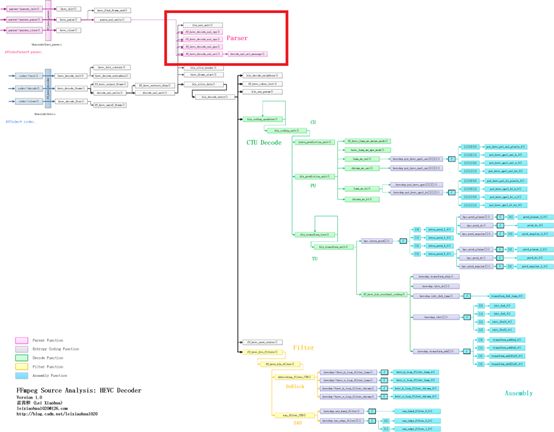
单击查看更清晰的大图
HEVC解析器(Parser)部分的源代码的调用关系如下图所示。
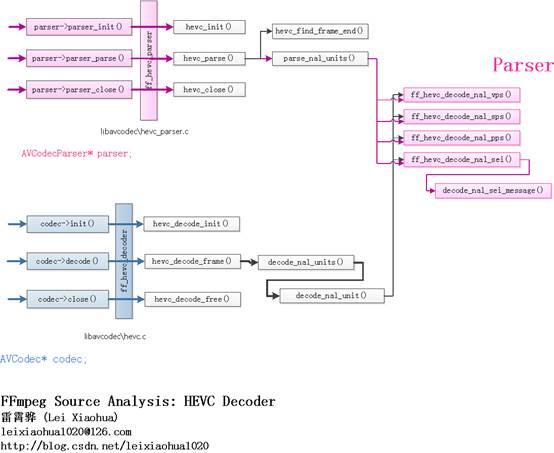
单击查看更清晰的大图
ff_hevc_decode_nal_vps():解析VPS。下文将会分别这几个函数。
ff_hevc_decode_nal_sps():解析SPS。
ff_hevc_decode_nal_pps():解析PPS。
ff_hevc_decode_nal_sei():解析SEI。
ff_hevc_decoder
ff_hevc_decoder是HEVC解码器对应的AVCodec结构体。该结构体的定义位于libavcodec\hevc.c,如下所示。AVCodec ff_hevc_decoder = {
.name = "hevc",
.long_name = NULL_IF_CONFIG_SMALL("HEVC (High Efficiency Video Coding)"),
.type = AVMEDIA_TYPE_VIDEO,
.id = AV_CODEC_ID_HEVC,
.priv_data_size = sizeof(HEVCContext),
.priv_class = &hevc_decoder_class,
.init = hevc_decode_init,
.close = hevc_decode_free,
.decode = hevc_decode_frame,
.flush = hevc_decode_flush,
.update_thread_context = hevc_update_thread_context,
.init_thread_copy = hevc_init_thread_copy,
.capabilities = CODEC_CAP_DR1 | CODEC_CAP_DELAY |
CODEC_CAP_SLICE_THREADS | CODEC_CAP_FRAME_THREADS,
.profiles = NULL_IF_CONFIG_SMALL(profiles),
};从源代码中可以看出,HEVC解码器的解码函数是hevc_decode_frame()。由于本文主要分析HEVC解析器,所以不对解码函数进行分析。在这里只需要知道hevc_decode_frame()调用了decode_nal_units(),而decode_nal_units()最终调用了ff_hevc_decode_nal_sps()等解析函数即可。
ff_hevc_parser
ff_hevc_parser是HEVC解析器对应的AVCodecParser结构体。该结构体的定义位于libavcodec\hevc_parser.c,如下所示。AVCodecParser ff_hevc_parser = {
.codec_ids = { AV_CODEC_ID_HEVC },
.priv_data_size = sizeof(HEVCParseContext),
.parser_init = hevc_init,
.parser_parse = hevc_parse,
.parser_close = hevc_close,
.split = hevc_split,
};从源代码可以看出,HEVC解析器的初始化函数是hevc_init(),解析函数是hevc_parse(),关闭函数是hevc_close()。
hevc_init()
hevc_init()是HEVC解析器的初始化函数,该函数的定义如下所示。static int hevc_init(AVCodecParserContext *s)
{
HEVCContext *h = &((HEVCParseContext *)s->priv_data)->h;
h->HEVClc = av_mallocz(sizeof(HEVCLocalContext));
h->skipped_bytes_pos_size = INT_MAX;
return 0;
}可以看出hevc_init()简单地给内部成员变量分配了内存。
hevc_close()
hevc_close()是HEVC解析器的关闭函数,该函数的定义如下所示。static void hevc_close(AVCodecParserContext *s)
{
int i;
HEVCContext *h = &((HEVCParseContext *)s->priv_data)->h;
ParseContext *pc = &((HEVCParseContext *)s->priv_data)->pc;
av_freep(&h->skipped_bytes_pos);
av_freep(&h->HEVClc);
av_freep(&pc->buffer);
for (i = 0; i < FF_ARRAY_ELEMS(h->vps_list); i++)
av_buffer_unref(&h->vps_list[i]);
for (i = 0; i < FF_ARRAY_ELEMS(h->sps_list); i++)
av_buffer_unref(&h->sps_list[i]);
for (i = 0; i < FF_ARRAY_ELEMS(h->pps_list); i++)
av_buffer_unref(&h->pps_list[i]);
av_buffer_unref(&h->current_sps);
h->sps = NULL;
for (i = 0; i < h->nals_allocated; i++)
av_freep(&h->nals[i].rbsp_buffer);
av_freep(&h->nals);
h->nals_allocated = 0;
}可以看出hevc_close()释放了内部成员变量的内存。
hevc_parse()
hevc_parse()是HEVC解析器中最关键的解析函数。该函数的定义如下所示。/* * 解析码流 * * 注释:雷霄骅 * [email protected] * http://blog.csdn.net/leixiaohua1020 */ static int hevc_parse(AVCodecParserContext *s, AVCodecContext *avctx, const uint8_t **poutbuf, int *poutbuf_size, const uint8_t *buf, int buf_size) { int next; ParseContext *pc = &((HEVCParseContext *)s->priv_data)->pc; //PARSER_FLAG_COMPLETE_FRAMES为1的时候说明传入的就是完整的1帧数据 //这时候不用再分割NALU //PARSER_FLAG_COMPLETE_FRAMES为0的时候说明传入的是任意一段数据 //需要先分离出完整的NALU if (s->flags & PARSER_FLAG_COMPLETE_FRAMES) { next = buf_size; } else { //分割NALU //通过查找起始码0x000001的方法 next = hevc_find_frame_end(s, buf, buf_size); //合并 if (ff_combine_frame(pc, next, &buf, &buf_size) < 0) { *poutbuf = NULL; *poutbuf_size = 0; return buf_size; } } //解析NALU内容(不解码) parse_nal_units(s, avctx, buf, buf_size); *poutbuf = buf; *poutbuf_size = buf_size; return next; }
从源代码可以看出,hevc_parse()主要做了两步工作:
(1)判断传入的flags 中是否包含PARSER_FLAG_COMPLETE_FRAMES。如果包含,则说明传入的是完整的一帧数据,不作任何处理;如果不包含,则说明传入的不是完整的一帧数据而是任意一段HEVC数据,则需要调用hevc_find_frame_end()通过查找“起始码”(0x00000001或者0x000001)的方法,分离出完整的一帧数据。下面分别看一下这两步中的两个函数。
(2)调用parse_nal_units()完成了NALU的解析工作。
hevc_find_frame_end()
hevc_find_frame_end()用于从HEVC码流中分离出完整的NALU。该函数的定义位于libavcodec\hevc_parser.c,如下所示。/**
* Find the end of the current frame in the bitstream.
* @return the position of the first byte of the next frame, or END_NOT_FOUND
*/
//分割NALU
static int hevc_find_frame_end(AVCodecParserContext *s, const uint8_t *buf,
int buf_size)
{
int i;
ParseContext *pc = &((HEVCParseContext *)s->priv_data)->pc;
//一个一个字节进行处理
for (i = 0; i < buf_size; i++) {
int nut;
//state64可以存8个字节
//buf[i]存入state64
pc->state64 = (pc->state64 << 8) | buf[i];
//起始码定义#define START_CODE 0x000001
//state64右移24bit之后,再对比是否为起始码0x000001
if (((pc->state64 >> 3 * 8) & 0xFFFFFF) != START_CODE)
continue;
//找到起始码之后
/*
* 此时state64内容如下:
* | Start Code | NALU Header |
* |------|------|------|------|------|------|------|------|
*
* | buf | buf | buf | buf | buf | buf |
* | [t-5]| [t-4]| [t-3]| [t-2]| [t-1]| [t] |
*
* Start Code:
* 0x000001
*
* NALU Header:
* forbidden_zero_bit: 1bit。取值0。
* nal_unit_type: 6 bit。NALU类型。
* nuh_layer_id: 6 bit。目前取值为0(保留以后使用).
* nuh_temporal_id_plus1: 3 bit。减1后为NALU时域层标识号TemporalID。
*
*/
//state64右移16bit之后,state64最低字节为起始码后面的1Byte。即为NALU Header的前一个字节
//NALU Header的前一个字节中,第1bit为forbidden_zero_bit,取值为0;
//2-7bit为nal_unit_type;第8bit为nuh_layer_id,取值为0。
//在这里state64右移(16+1)bit,然后相与0x3F(00111111)
//即得到了nal_unit_type
nut = (pc->state64 >> 2 * 8 + 1) & 0x3F;
// Beginning of access unit
if ((nut >= NAL_VPS && nut <= NAL_AUD) || nut == NAL_SEI_PREFIX ||
(nut >= 41 && nut <= 44) || (nut >= 48 && nut <= 55)) {
if (pc->frame_start_found) {
pc->frame_start_found = 0;
//返回起始码开始位置
return i - 5;
}
} else if (nut <= NAL_RASL_R ||
(nut >= NAL_BLA_W_LP && nut <= NAL_CRA_NUT)) {
int first_slice_segment_in_pic_flag = buf[i] >> 7;
if (first_slice_segment_in_pic_flag) {
if (!pc->frame_start_found) {
pc->frame_start_found = 1;
} else { // First slice of next frame found
pc->frame_start_found = 0;
//返回起始码开始位置
return i - 5;
}
}
}
}
return END_NOT_FOUND;
}
从源代码可以看出,hevc_find_frame_end()使用ParseContext中的state64临时缓存读取的字节。state64是一个uint64_t类型的变量,一共可以存储8Byte的数据。函数体的for()循环一次读取一个字节,读取完成后将该字节放入state64变量中;接着与起始码“0x000001”进行比较,如果不相等则继续读取,如果相等的话则提取NALU Header中nal_unit_type信息做相应处理后返回起始码开始的位置。
parse_nal_units()
parse_nal_units()用于解析一些NALU(VPS、SPS、PPS)的信息。该函数的定义位于libavcodec\hevc_parser.c,如下所示。/** * Parse NAL units of found picture and decode some basic information. * * @param s parser context. * @param avctx codec context. * @param buf buffer with field/frame data. * @param buf_size size of the buffer. * * 解析NALU内容(不解码) * 注释:雷霄骅 * [email protected] * http://blog.csdn.net/leixiaohua1020 * */ static inline int parse_nal_units(AVCodecParserContext *s, AVCodecContext *avctx, const uint8_t *buf, int buf_size) { HEVCContext *h = &((HEVCParseContext *)s->priv_data)->h; GetBitContext *gb = &h->HEVClc->gb; SliceHeader *sh = &h->sh; const uint8_t *buf_end = buf + buf_size; int state = -1, i; HEVCNAL *nal; /* set some sane default values */ s->pict_type = AV_PICTURE_TYPE_I; s->key_frame = 0; s->picture_structure = AV_PICTURE_STRUCTURE_UNKNOWN; h->avctx = avctx; if (!buf_size) return 0; if (h->nals_allocated < 1) { HEVCNAL *tmp = av_realloc_array(h->nals, 1, sizeof(*tmp)); if (!tmp) return AVERROR(ENOMEM); h->nals = tmp; memset(h->nals, 0, sizeof(*tmp)); h->nals_allocated = 1; } nal = &h->nals[0]; for (;;) { int src_length, consumed; buf = avpriv_find_start_code(buf, buf_end, &state); if (--buf + 2 >= buf_end) break; src_length = buf_end - buf; h->nal_unit_type = (*buf >> 1) & 0x3f; h->temporal_id = (*(buf + 1) & 0x07) - 1; if (h->nal_unit_type <= NAL_CRA_NUT) { // Do not walk the whole buffer just to decode slice segment header if (src_length > 20) src_length = 20; } //类似于H.264解析器中的ff_h264_decode_nal() consumed = ff_hevc_extract_rbsp(h, buf, src_length, nal); if (consumed < 0) return consumed; init_get_bits8(gb, nal->data + 2, nal->size); /* * 几种NALU之间的关系 * +--SS1 * | * +--PPS1<--+ * | | * +--SPS1<--+ +--SS2 * | | * VPS<--+ +--PPS2 * | * +--SPS2 * */ //解析不同种类的NALU switch (h->nal_unit_type) { case NAL_VPS: //解析VPS //VPS主要传输视频分级信息,有利于兼容可分级视频编码以及多视点视频编码 ff_hevc_decode_nal_vps(h); break; case NAL_SPS: //解析SPS ff_hevc_decode_nal_sps(h); break; case NAL_PPS: //解析PPS ff_hevc_decode_nal_pps(h); break; case NAL_SEI_PREFIX: case NAL_SEI_SUFFIX: //解析SEI ff_hevc_decode_nal_sei(h); break; case NAL_TRAIL_N: case NAL_TRAIL_R: case NAL_TSA_N: case NAL_TSA_R: case NAL_STSA_N: case NAL_STSA_R: case NAL_RADL_N: case NAL_RADL_R: case NAL_RASL_N: case NAL_RASL_R: case NAL_BLA_W_LP: case NAL_BLA_W_RADL: case NAL_BLA_N_LP: case NAL_IDR_W_RADL: case NAL_IDR_N_LP: case NAL_CRA_NUT: //解析 SS Header //按照解码顺序,当前SS是否为第1个SS(Slice Segment) sh->first_slice_in_pic_flag = get_bits1(gb); s->picture_structure = h->picture_struct; s->field_order = h->picture_struct; //IRAP, Intra Random Access Point, 随机介入点 //包括 IDR, CRA, BLA if (IS_IRAP(h)) { //设置关键帧 s->key_frame = 1; sh->no_output_of_prior_pics_flag = get_bits1(gb); } //当前Slice引用的PPS的ID号 sh->pps_id = get_ue_golomb(gb); if (sh->pps_id >= MAX_PPS_COUNT || !h->pps_list[sh->pps_id]) { av_log(h->avctx, AV_LOG_ERROR, "PPS id out of range: %d\n", sh->pps_id); return AVERROR_INVALIDDATA; } h->pps = (HEVCPPS*)h->pps_list[sh->pps_id]->data; if (h->pps->sps_id >= MAX_SPS_COUNT || !h->sps_list[h->pps->sps_id]) { av_log(h->avctx, AV_LOG_ERROR, "SPS id out of range: %d\n", h->pps->sps_id); return AVERROR_INVALIDDATA; } if (h->sps != (HEVCSPS*)h->sps_list[h->pps->sps_id]->data) { h->sps = (HEVCSPS*)h->sps_list[h->pps->sps_id]->data; h->vps = (HEVCVPS*)h->vps_list[h->sps->vps_id]->data; } //当前Slice不是第一个SS if (!sh->first_slice_in_pic_flag) { int slice_address_length; //当前SS是否依赖SS if (h->pps->dependent_slice_segments_enabled_flag) sh->dependent_slice_segment_flag = get_bits1(gb); else sh->dependent_slice_segment_flag = 0; slice_address_length = av_ceil_log2_c(h->sps->ctb_width * h->sps->ctb_height); //当前SS中第一个CTU的地址 sh->slice_segment_addr = get_bits(gb, slice_address_length); if (sh->slice_segment_addr >= h->sps->ctb_width * h->sps->ctb_height) { av_log(h->avctx, AV_LOG_ERROR, "Invalid slice segment address: %u.\n", sh->slice_segment_addr); return AVERROR_INVALIDDATA; } } else sh->dependent_slice_segment_flag = 0;//独立SS if (sh->dependent_slice_segment_flag)//依赖SS break; for (i = 0; i < h->pps->num_extra_slice_header_bits; i++) skip_bits(gb, 1); // slice_reserved_undetermined_flag[] //slice type定义: // 0: B Slice // 1: P Slice // 2: I Slice sh->slice_type = get_ue_golomb(gb);// if (!(sh->slice_type == I_SLICE || sh->slice_type == P_SLICE || sh->slice_type == B_SLICE)) { av_log(h->avctx, AV_LOG_ERROR, "Unknown slice type: %d.\n", sh->slice_type); return AVERROR_INVALIDDATA; } s->pict_type = sh->slice_type == B_SLICE ? AV_PICTURE_TYPE_B : sh->slice_type == P_SLICE ? AV_PICTURE_TYPE_P : AV_PICTURE_TYPE_I; if (h->pps->output_flag_present_flag) sh->pic_output_flag = get_bits1(gb); if (h->sps->separate_colour_plane_flag) sh->colour_plane_id = get_bits(gb, 2); if (!IS_IDR(h)) { //不是IDR,则计算POC sh->pic_order_cnt_lsb = get_bits(gb, h->sps->log2_max_poc_lsb); s->output_picture_number = h->poc = ff_hevc_compute_poc(h, sh->pic_order_cnt_lsb); } else s->output_picture_number = h->poc = 0; if (h->temporal_id == 0 && h->nal_unit_type != NAL_TRAIL_N && h->nal_unit_type != NAL_TSA_N && h->nal_unit_type != NAL_STSA_N && h->nal_unit_type != NAL_RADL_N && h->nal_unit_type != NAL_RASL_N && h->nal_unit_type != NAL_RADL_R && h->nal_unit_type != NAL_RASL_R) h->pocTid0 = h->poc; return 0; /* no need to evaluate the rest */ } buf += consumed; } /* didn't find a picture! */ av_log(h->avctx, AV_LOG_ERROR, "missing picture in access unit\n"); return -1; }
从源代码可以看出,parse_nal_units()根据nal_unit_type的不同,调用不同的解析函数进行处理。例如:
a)解析VPS的时候调用ff_hevc_decode_nal_vps()下文简单分析这几种NALU的解析函数。
b)解析SPS的时候调用ff_hevc_decode_nal_sps()
c)解析PPS的时候调用ff_hevc_decode_nal_pps()
d)解析SEI的时候调用ff_hevc_decode_nal_sei()
e)解析SS Header的一部分信息。
ff_hevc_decode_nal_vps()
目前还没有研究过VPS,所以没有分析该函数。ff_hevc_decode_nal_sps()
ff_hevc_decode_nal_sps()用于解析HEVC码流中的SPS。该函数的定义位于libavcodec\hevc_ps.c,如下所示。//解析SPS
int ff_hevc_decode_nal_sps(HEVCContext *s)
{
const AVPixFmtDescriptor *desc;
GetBitContext *gb = &s->HEVClc->gb;
int ret = 0;
unsigned int sps_id = 0;
int log2_diff_max_min_transform_block_size;
int bit_depth_chroma, start, vui_present, sublayer_ordering_info;
int i;
HEVCSPS *sps;
AVBufferRef *sps_buf = av_buffer_allocz(sizeof(*sps));
if (!sps_buf)
return AVERROR(ENOMEM);
sps = (HEVCSPS*)sps_buf->data;
av_log(s->avctx, AV_LOG_DEBUG, "Decoding SPS\n");
// Coded parameters
// 当前引用的VPS的ID
sps->vps_id = get_bits(gb, 4);
if (sps->vps_id >= MAX_VPS_COUNT) {
av_log(s->avctx, AV_LOG_ERROR, "VPS id out of range: %d\n", sps->vps_id);
ret = AVERROR_INVALIDDATA;
goto err;
}
if (!s->vps_list[sps->vps_id]) {
av_log(s->avctx, AV_LOG_ERROR, "VPS %d does not exist\n",
sps->vps_id);
ret = AVERROR_INVALIDDATA;
goto err;
}
//时域子层的最大数目
sps->max_sub_layers = get_bits(gb, 3) + 1;
if (sps->max_sub_layers > MAX_SUB_LAYERS) {
av_log(s->avctx, AV_LOG_ERROR, "sps_max_sub_layers out of range: %d\n",
sps->max_sub_layers);
ret = AVERROR_INVALIDDATA;
goto err;
}
skip_bits1(gb); // temporal_id_nesting_flag
if (parse_ptl(s, &sps->ptl, sps->max_sub_layers) < 0)
goto err;
//当前SPS的ID
sps_id = get_ue_golomb_long(gb);
if (sps_id >= MAX_SPS_COUNT) {
av_log(s->avctx, AV_LOG_ERROR, "SPS id out of range: %d\n", sps_id);
ret = AVERROR_INVALIDDATA;
goto err;
}
/*
* chroma_format_idc色度取样格式
* 0: Y
* 1: YUV420P
* 2: YUV422P
* 3: YUV444P
*/
sps->chroma_format_idc = get_ue_golomb_long(gb);
if (!(sps->chroma_format_idc == 1 || sps->chroma_format_idc == 2 || sps->chroma_format_idc == 3)) {
avpriv_report_missing_feature(s->avctx, "chroma_format_idc != {1, 2, 3}\n");
ret = AVERROR_PATCHWELCOME;
goto err;
}
//YUV444的时候,标记是否对3个分量单独编码
if (sps->chroma_format_idc == 3)
sps->separate_colour_plane_flag = get_bits1(gb);
if (sps->separate_colour_plane_flag)
sps->chroma_format_idc = 0;
//宽和高
sps->width = get_ue_golomb_long(gb);
sps->height = get_ue_golomb_long(gb);
if ((ret = av_image_check_size(sps->width,
sps->height, 0, s->avctx)) < 0)
goto err;
//裁剪相关
if (get_bits1(gb)) { // pic_conformance_flag
//TODO: * 2 is only valid for 420
sps->pic_conf_win.left_offset = get_ue_golomb_long(gb) * 2;
sps->pic_conf_win.right_offset = get_ue_golomb_long(gb) * 2;
sps->pic_conf_win.top_offset = get_ue_golomb_long(gb) * 2;
sps->pic_conf_win.bottom_offset = get_ue_golomb_long(gb) * 2;
if (s->avctx->flags2 & CODEC_FLAG2_IGNORE_CROP) {
av_log(s->avctx, AV_LOG_DEBUG,
"discarding sps conformance window, "
"original values are l:%u r:%u t:%u b:%u\n",
sps->pic_conf_win.left_offset,
sps->pic_conf_win.right_offset,
sps->pic_conf_win.top_offset,
sps->pic_conf_win.bottom_offset);
sps->pic_conf_win.left_offset =
sps->pic_conf_win.right_offset =
sps->pic_conf_win.top_offset =
sps->pic_conf_win.bottom_offset = 0;
}
sps->output_window = sps->pic_conf_win;
}
//亮度像素的颜色位深
sps->bit_depth = get_ue_golomb_long(gb) + 8;
//色度像素的颜色位深
bit_depth_chroma = get_ue_golomb_long(gb) + 8;
if (bit_depth_chroma != sps->bit_depth) {
av_log(s->avctx, AV_LOG_ERROR,
"Luma bit depth (%d) is different from chroma bit depth (%d), "
"this is unsupported.\n",
sps->bit_depth, bit_depth_chroma);
ret = AVERROR_INVALIDDATA;
goto err;
}
//根据颜色位深和色度采样格式设定pix_fmt
switch (sps->bit_depth) {
case 8:
if (sps->chroma_format_idc == 1) sps->pix_fmt = AV_PIX_FMT_YUV420P;
if (sps->chroma_format_idc == 2) sps->pix_fmt = AV_PIX_FMT_YUV422P;
if (sps->chroma_format_idc == 3) sps->pix_fmt = AV_PIX_FMT_YUV444P;
break;
case 9:
if (sps->chroma_format_idc == 1) sps->pix_fmt = AV_PIX_FMT_YUV420P9;
if (sps->chroma_format_idc == 2) sps->pix_fmt = AV_PIX_FMT_YUV422P9;
if (sps->chroma_format_idc == 3) sps->pix_fmt = AV_PIX_FMT_YUV444P9;
break;
case 10:
if (sps->chroma_format_idc == 1) sps->pix_fmt = AV_PIX_FMT_YUV420P10;
if (sps->chroma_format_idc == 2) sps->pix_fmt = AV_PIX_FMT_YUV422P10;
if (sps->chroma_format_idc == 3) sps->pix_fmt = AV_PIX_FMT_YUV444P10;
break;
case 12:
if (sps->chroma_format_idc == 1) sps->pix_fmt = AV_PIX_FMT_YUV420P12;
if (sps->chroma_format_idc == 2) sps->pix_fmt = AV_PIX_FMT_YUV422P12;
if (sps->chroma_format_idc == 3) sps->pix_fmt = AV_PIX_FMT_YUV444P12;
break;
default:
av_log(s->avctx, AV_LOG_ERROR,
"4:2:0, 4:2:2, 4:4:4 supports are currently specified for 8, 10 and 12 bits.\n");
ret = AVERROR_PATCHWELCOME;
goto err;
}
desc = av_pix_fmt_desc_get(sps->pix_fmt);
if (!desc) {
ret = AVERROR(EINVAL);
goto err;
}
sps->hshift[0] = sps->vshift[0] = 0;
sps->hshift[2] = sps->hshift[1] = desc->log2_chroma_w;
sps->vshift[2] = sps->vshift[1] = desc->log2_chroma_h;
sps->pixel_shift = sps->bit_depth > 8;
//用于计算POC
sps->log2_max_poc_lsb = get_ue_golomb_long(gb) + 4;
if (sps->log2_max_poc_lsb > 16) {
av_log(s->avctx, AV_LOG_ERROR, "log2_max_pic_order_cnt_lsb_minus4 out range: %d\n",
sps->log2_max_poc_lsb - 4);
ret = AVERROR_INVALIDDATA;
goto err;
}
sublayer_ordering_info = get_bits1(gb);
start = sublayer_ordering_info ? 0 : sps->max_sub_layers - 1;
for (i = start; i < sps->max_sub_layers; i++) {
sps->temporal_layer[i].max_dec_pic_buffering = get_ue_golomb_long(gb) + 1;
sps->temporal_layer[i].num_reorder_pics = get_ue_golomb_long(gb);
sps->temporal_layer[i].max_latency_increase = get_ue_golomb_long(gb) - 1;
if (sps->temporal_layer[i].max_dec_pic_buffering > MAX_DPB_SIZE) {
av_log(s->avctx, AV_LOG_ERROR, "sps_max_dec_pic_buffering_minus1 out of range: %d\n",
sps->temporal_layer[i].max_dec_pic_buffering - 1);
ret = AVERROR_INVALIDDATA;
goto err;
}
if (sps->temporal_layer[i].num_reorder_pics > sps->temporal_layer[i].max_dec_pic_buffering - 1) {
av_log(s->avctx, AV_LOG_WARNING, "sps_max_num_reorder_pics out of range: %d\n",
sps->temporal_layer[i].num_reorder_pics);
if (s->avctx->err_recognition & AV_EF_EXPLODE ||
sps->temporal_layer[i].num_reorder_pics > MAX_DPB_SIZE - 1) {
ret = AVERROR_INVALIDDATA;
goto err;
}
sps->temporal_layer[i].max_dec_pic_buffering = sps->temporal_layer[i].num_reorder_pics + 1;
}
}
if (!sublayer_ordering_info) {
for (i = 0; i < start; i++) {
sps->temporal_layer[i].max_dec_pic_buffering = sps->temporal_layer[start].max_dec_pic_buffering;
sps->temporal_layer[i].num_reorder_pics = sps->temporal_layer[start].num_reorder_pics;
sps->temporal_layer[i].max_latency_increase = sps->temporal_layer[start].max_latency_increase;
}
}
//亮度编码块-最小尺寸
sps->log2_min_cb_size = get_ue_golomb_long(gb) + 3;
//亮度编码块-最大尺寸和最小尺寸插值
sps->log2_diff_max_min_coding_block_size = get_ue_golomb_long(gb);
//亮度变换块-最小尺寸
sps->log2_min_tb_size = get_ue_golomb_long(gb) + 2;
//亮度变换块-最大尺寸和最小尺寸插值
log2_diff_max_min_transform_block_size = get_ue_golomb_long(gb);
sps->log2_max_trafo_size = log2_diff_max_min_transform_block_size +
sps->log2_min_tb_size;
if (sps->log2_min_tb_size >= sps->log2_min_cb_size) {
av_log(s->avctx, AV_LOG_ERROR, "Invalid value for log2_min_tb_size");
ret = AVERROR_INVALIDDATA;
goto err;
}
//帧间预测变换块-最大划分深度
sps->max_transform_hierarchy_depth_inter = get_ue_golomb_long(gb);
//帧内预测变换块-最大划分深度
sps->max_transform_hierarchy_depth_intra = get_ue_golomb_long(gb);
//是否使用量化矩阵
sps->scaling_list_enable_flag = get_bits1(gb);
if (sps->scaling_list_enable_flag) {
set_default_scaling_list_data(&sps->scaling_list);
if (get_bits1(gb)) {
ret = scaling_list_data(s, &sps->scaling_list, sps);
if (ret < 0)
goto err;
}
}
//是否使用非对称划分模式
sps->amp_enabled_flag = get_bits1(gb);
//是否在去块效应滤波过程中使用样点自适应补偿SAO
sps->sao_enabled = get_bits1(gb);
//允许PCM编码
sps->pcm_enabled_flag = get_bits1(gb);
//有关PCM编码的参数
if (sps->pcm_enabled_flag) {
sps->pcm.bit_depth = get_bits(gb, 4) + 1;
sps->pcm.bit_depth_chroma = get_bits(gb, 4) + 1;
sps->pcm.log2_min_pcm_cb_size = get_ue_golomb_long(gb) + 3;
sps->pcm.log2_max_pcm_cb_size = sps->pcm.log2_min_pcm_cb_size +
get_ue_golomb_long(gb);
if (sps->pcm.bit_depth > sps->bit_depth) {
av_log(s->avctx, AV_LOG_ERROR,
"PCM bit depth (%d) is greater than normal bit depth (%d)\n",
sps->pcm.bit_depth, sps->bit_depth);
ret = AVERROR_INVALIDDATA;
goto err;
}
sps->pcm.loop_filter_disable_flag = get_bits1(gb);
}
//短期参考num_short_term_ref_pic_set
sps->nb_st_rps = get_ue_golomb_long(gb);
if (sps->nb_st_rps > MAX_SHORT_TERM_RPS_COUNT) {
av_log(s->avctx, AV_LOG_ERROR, "Too many short term RPS: %d.\n",
sps->nb_st_rps);
ret = AVERROR_INVALIDDATA;
goto err;
}
for (i = 0; i < sps->nb_st_rps; i++) {
if ((ret = ff_hevc_decode_short_term_rps(s, &sps->st_rps[i],
sps, 0)) < 0)
goto err;
}
//长期参考num_long_term_ref_pic_set
sps->long_term_ref_pics_present_flag = get_bits1(gb);
if (sps->long_term_ref_pics_present_flag) {
sps->num_long_term_ref_pics_sps = get_ue_golomb_long(gb);
if (sps->num_long_term_ref_pics_sps > 31U) {
av_log(0, AV_LOG_ERROR, "num_long_term_ref_pics_sps %d is out of range.\n",
sps->num_long_term_ref_pics_sps);
goto err;
}
for (i = 0; i < sps->num_long_term_ref_pics_sps; i++) {
sps->lt_ref_pic_poc_lsb_sps[i] = get_bits(gb, sps->log2_max_poc_lsb);
sps->used_by_curr_pic_lt_sps_flag[i] = get_bits1(gb);
}
}
//是否使用时域MV预测
sps->sps_temporal_mvp_enabled_flag = get_bits1(gb);
//滤波过程是否使用双线性插值
sps->sps_strong_intra_smoothing_enable_flag = get_bits1(gb);
sps->vui.sar = (AVRational){0, 1};
vui_present = get_bits1(gb);
if (vui_present)
decode_vui(s, sps);
if (get_bits1(gb)) { // sps_extension_flag
int sps_extension_flag[1];
for (i = 0; i < 1; i++)
sps_extension_flag[i] = get_bits1(gb);
skip_bits(gb, 7); //sps_extension_7bits = get_bits(gb, 7);
if (sps_extension_flag[0]) {
int extended_precision_processing_flag;
int high_precision_offsets_enabled_flag;
int cabac_bypass_alignment_enabled_flag;
sps->transform_skip_rotation_enabled_flag = get_bits1(gb);
sps->transform_skip_context_enabled_flag = get_bits1(gb);
sps->implicit_rdpcm_enabled_flag = get_bits1(gb);
sps->explicit_rdpcm_enabled_flag = get_bits1(gb);
extended_precision_processing_flag = get_bits1(gb);
if (extended_precision_processing_flag)
av_log(s->avctx, AV_LOG_WARNING,
"extended_precision_processing_flag not yet implemented\n");
sps->intra_smoothing_disabled_flag = get_bits1(gb);
high_precision_offsets_enabled_flag = get_bits1(gb);
if (high_precision_offsets_enabled_flag)
av_log(s->avctx, AV_LOG_WARNING,
"high_precision_offsets_enabled_flag not yet implemented\n");
sps->persistent_rice_adaptation_enabled_flag = get_bits1(gb);
cabac_bypass_alignment_enabled_flag = get_bits1(gb);
if (cabac_bypass_alignment_enabled_flag)
av_log(s->avctx, AV_LOG_WARNING,
"cabac_bypass_alignment_enabled_flag not yet implemented\n");
}
}
if (s->apply_defdispwin) {
sps->output_window.left_offset += sps->vui.def_disp_win.left_offset;
sps->output_window.right_offset += sps->vui.def_disp_win.right_offset;
sps->output_window.top_offset += sps->vui.def_disp_win.top_offset;
sps->output_window.bottom_offset += sps->vui.def_disp_win.bottom_offset;
}
if (sps->output_window.left_offset & (0x1F >> (sps->pixel_shift)) &&
!(s->avctx->flags & CODEC_FLAG_UNALIGNED)) {
sps->output_window.left_offset &= ~(0x1F >> (sps->pixel_shift));
av_log(s->avctx, AV_LOG_WARNING, "Reducing left output window to %d "
"chroma samples to preserve alignment.\n",
sps->output_window.left_offset);
}
sps->output_width = sps->width -
(sps->output_window.left_offset + sps->output_window.right_offset);
sps->output_height = sps->height -
(sps->output_window.top_offset + sps->output_window.bottom_offset);
if (sps->output_width <= 0 || sps->output_height <= 0) {
av_log(s->avctx, AV_LOG_WARNING, "Invalid visible frame dimensions: %dx%d.\n",
sps->output_width, sps->output_height);
if (s->avctx->err_recognition & AV_EF_EXPLODE) {
ret = AVERROR_INVALIDDATA;
goto err;
}
av_log(s->avctx, AV_LOG_WARNING,
"Displaying the whole video surface.\n");
memset(&sps->pic_conf_win, 0, sizeof(sps->pic_conf_win));
memset(&sps->output_window, 0, sizeof(sps->output_window));
sps->output_width = sps->width;
sps->output_height = sps->height;
}
// Inferred parameters
// 推算出来的参数
sps->log2_ctb_size = sps->log2_min_cb_size +
sps->log2_diff_max_min_coding_block_size;
sps->log2_min_pu_size = sps->log2_min_cb_size - 1;
sps->ctb_width = (sps->width + (1 << sps->log2_ctb_size) - 1) >> sps->log2_ctb_size;
sps->ctb_height = (sps->height + (1 << sps->log2_ctb_size) - 1) >> sps->log2_ctb_size;
sps->ctb_size = sps->ctb_width * sps->ctb_height;
sps->min_cb_width = sps->width >> sps->log2_min_cb_size;
sps->min_cb_height = sps->height >> sps->log2_min_cb_size;
sps->min_tb_width = sps->width >> sps->log2_min_tb_size;
sps->min_tb_height = sps->height >> sps->log2_min_tb_size;
sps->min_pu_width = sps->width >> sps->log2_min_pu_size;
sps->min_pu_height = sps->height >> sps->log2_min_pu_size;
sps->tb_mask = (1 << (sps->log2_ctb_size - sps->log2_min_tb_size)) - 1;
sps->qp_bd_offset = 6 * (sps->bit_depth - 8);
if (sps->width & ((1 << sps->log2_min_cb_size) - 1) ||
sps->height & ((1 << sps->log2_min_cb_size) - 1)) {
av_log(s->avctx, AV_LOG_ERROR, "Invalid coded frame dimensions.\n");
goto err;
}
if (sps->log2_ctb_size > MAX_LOG2_CTB_SIZE) {
av_log(s->avctx, AV_LOG_ERROR, "CTB size out of range: 2^%d\n", sps->log2_ctb_size);
goto err;
}
if (sps->max_transform_hierarchy_depth_inter > sps->log2_ctb_size - sps->log2_min_tb_size) {
av_log(s->avctx, AV_LOG_ERROR, "max_transform_hierarchy_depth_inter out of range: %d\n",
sps->max_transform_hierarchy_depth_inter);
goto err;
}
if (sps->max_transform_hierarchy_depth_intra > sps->log2_ctb_size - sps->log2_min_tb_size) {
av_log(s->avctx, AV_LOG_ERROR, "max_transform_hierarchy_depth_intra out of range: %d\n",
sps->max_transform_hierarchy_depth_intra);
goto err;
}
if (sps->log2_max_trafo_size > FFMIN(sps->log2_ctb_size, 5)) {
av_log(s->avctx, AV_LOG_ERROR,
"max transform block size out of range: %d\n",
sps->log2_max_trafo_size);
goto err;
}
if (get_bits_left(gb) < 0) {
av_log(s->avctx, AV_LOG_ERROR,
"Overread SPS by %d bits\n", -get_bits_left(gb));
goto err;
}
if (s->avctx->debug & FF_DEBUG_BITSTREAM) {
av_log(s->avctx, AV_LOG_DEBUG,
"Parsed SPS: id %d; coded wxh: %dx%d; "
"cropped wxh: %dx%d; pix_fmt: %s.\n",
sps_id, sps->width, sps->height,
sps->output_width, sps->output_height,
av_get_pix_fmt_name(sps->pix_fmt));
}
/* check if this is a repeat of an already parsed SPS, then keep the
* original one.
* otherwise drop all PPSes that depend on it */
if (s->sps_list[sps_id] &&
!memcmp(s->sps_list[sps_id]->data, sps_buf->data, sps_buf->size)) {
av_buffer_unref(&sps_buf);
} else {
for (i = 0; i < FF_ARRAY_ELEMS(s->pps_list); i++) {
if (s->pps_list[i] && ((HEVCPPS*)s->pps_list[i]->data)->sps_id == sps_id)
av_buffer_unref(&s->pps_list[i]);
}
if (s->sps_list[sps_id] && s->sps == (HEVCSPS*)s->sps_list[sps_id]->data) {
av_buffer_unref(&s->current_sps);
s->current_sps = av_buffer_ref(s->sps_list[sps_id]);
if (!s->current_sps)
s->sps = NULL;
}
av_buffer_unref(&s->sps_list[sps_id]);
s->sps_list[sps_id] = sps_buf;
}
return 0;
err:
av_buffer_unref(&sps_buf);
return ret;
}
解析SPS源代码并不是很有“技术含量”。只要参考ITU-T的《HEVC标准》就可以理解了,不再做过多详细的分析。
ff_hevc_decode_nal_pps()
ff_hevc_decode_nal_pps()用于解析HEVC码流中的PPS。该函数的定义位于libavcodec\hevc_ps.c,如下所示。//解析PPS
int ff_hevc_decode_nal_pps(HEVCContext *s)
{
GetBitContext *gb = &s->HEVClc->gb;
HEVCSPS *sps = NULL;
int pic_area_in_ctbs;
int log2_diff_ctb_min_tb_size;
int i, j, x, y, ctb_addr_rs, tile_id;
int ret = 0;
unsigned int pps_id = 0;
AVBufferRef *pps_buf;
HEVCPPS *pps = av_mallocz(sizeof(*pps));
if (!pps)
return AVERROR(ENOMEM);
pps_buf = av_buffer_create((uint8_t *)pps, sizeof(*pps),
hevc_pps_free, NULL, 0);
if (!pps_buf) {
av_freep(&pps);
return AVERROR(ENOMEM);
}
av_log(s->avctx, AV_LOG_DEBUG, "Decoding PPS\n");
// Default values
// 默认值
pps->loop_filter_across_tiles_enabled_flag = 1;
pps->num_tile_columns = 1;
pps->num_tile_rows = 1;
pps->uniform_spacing_flag = 1;
pps->disable_dbf = 0;
pps->beta_offset = 0;
pps->tc_offset = 0;
pps->log2_max_transform_skip_block_size = 2;
// Coded parameters
//当前PPS的ID
pps_id = get_ue_golomb_long(gb);
if (pps_id >= MAX_PPS_COUNT) {
av_log(s->avctx, AV_LOG_ERROR, "PPS id out of range: %d\n", pps_id);
ret = AVERROR_INVALIDDATA;
goto err;
}
//引用的SPS的ID
pps->sps_id = get_ue_golomb_long(gb);
if (pps->sps_id >= MAX_SPS_COUNT) {
av_log(s->avctx, AV_LOG_ERROR, "SPS id out of range: %d\n", pps->sps_id);
ret = AVERROR_INVALIDDATA;
goto err;
}
if (!s->sps_list[pps->sps_id]) {
av_log(s->avctx, AV_LOG_ERROR, "SPS %u does not exist.\n", pps->sps_id);
ret = AVERROR_INVALIDDATA;
goto err;
}
sps = (HEVCSPS *)s->sps_list[pps->sps_id]->data;
//判断当前Slice是否包含依赖片
pps->dependent_slice_segments_enabled_flag = get_bits1(gb);
pps->output_flag_present_flag = get_bits1(gb);
pps->num_extra_slice_header_bits = get_bits(gb, 3);
pps->sign_data_hiding_flag = get_bits1(gb);
//在CABAC中用何种方式确定上下文变量的初始值
pps->cabac_init_present_flag = get_bits1(gb);
//list0中参考图像数目的默认最大值
pps->num_ref_idx_l0_default_active = get_ue_golomb_long(gb) + 1;
//list1中参考图像数目的默认最大值
pps->num_ref_idx_l1_default_active = get_ue_golomb_long(gb) + 1;
//亮度分量QP的初始值
pps->pic_init_qp_minus26 = get_se_golomb(gb);
pps->constrained_intra_pred_flag = get_bits1(gb);
pps->transform_skip_enabled_flag = get_bits1(gb);
pps->cu_qp_delta_enabled_flag = get_bits1(gb);
pps->diff_cu_qp_delta_depth = 0;
if (pps->cu_qp_delta_enabled_flag)
pps->diff_cu_qp_delta_depth = get_ue_golomb_long(gb);
if (pps->diff_cu_qp_delta_depth < 0 ||
pps->diff_cu_qp_delta_depth > sps->log2_diff_max_min_coding_block_size) {
av_log(s->avctx, AV_LOG_ERROR, "diff_cu_qp_delta_depth %d is invalid\n",
pps->diff_cu_qp_delta_depth);
ret = AVERROR_INVALIDDATA;
goto err;
}
pps->cb_qp_offset = get_se_golomb(gb);
if (pps->cb_qp_offset < -12 || pps->cb_qp_offset > 12) {
av_log(s->avctx, AV_LOG_ERROR, "pps_cb_qp_offset out of range: %d\n",
pps->cb_qp_offset);
ret = AVERROR_INVALIDDATA;
goto err;
}
pps->cr_qp_offset = get_se_golomb(gb);
if (pps->cr_qp_offset < -12 || pps->cr_qp_offset > 12) {
av_log(s->avctx, AV_LOG_ERROR, "pps_cr_qp_offset out of range: %d\n",
pps->cr_qp_offset);
ret = AVERROR_INVALIDDATA;
goto err;
}
pps->pic_slice_level_chroma_qp_offsets_present_flag = get_bits1(gb);
//P Slice是否使用加权预测
pps->weighted_pred_flag = get_bits1(gb);
//B Slice是否使用加权预测
pps->weighted_bipred_flag = get_bits1(gb);
pps->transquant_bypass_enable_flag = get_bits1(gb);
//是否使用tile
pps->tiles_enabled_flag = get_bits1(gb);
pps->entropy_coding_sync_enabled_flag = get_bits1(gb);
if (pps->tiles_enabled_flag) {
//Tile的列数
pps->num_tile_columns = get_ue_golomb_long(gb) + 1;
//Tile的行数
pps->num_tile_rows = get_ue_golomb_long(gb) + 1;
if (pps->num_tile_columns == 0 ||
pps->num_tile_columns >= sps->width) {
av_log(s->avctx, AV_LOG_ERROR, "num_tile_columns_minus1 out of range: %d\n",
pps->num_tile_columns - 1);
ret = AVERROR_INVALIDDATA;
goto err;
}
if (pps->num_tile_rows == 0 ||
pps->num_tile_rows >= sps->height) {
av_log(s->avctx, AV_LOG_ERROR, "num_tile_rows_minus1 out of range: %d\n",
pps->num_tile_rows - 1);
ret = AVERROR_INVALIDDATA;
goto err;
}
pps->column_width = av_malloc_array(pps->num_tile_columns, sizeof(*pps->column_width));
pps->row_height = av_malloc_array(pps->num_tile_rows, sizeof(*pps->row_height));
if (!pps->column_width || !pps->row_height) {
ret = AVERROR(ENOMEM);
goto err;
}
pps->uniform_spacing_flag = get_bits1(gb);
if (!pps->uniform_spacing_flag) {
uint64_t sum = 0;
//每个Tile的宽度和高度
for (i = 0; i < pps->num_tile_columns - 1; i++) {
pps->column_width[i] = get_ue_golomb_long(gb) + 1;
sum += pps->column_width[i];
}
if (sum >= sps->ctb_width) {
av_log(s->avctx, AV_LOG_ERROR, "Invalid tile widths.\n");
ret = AVERROR_INVALIDDATA;
goto err;
}
pps->column_width[pps->num_tile_columns - 1] = sps->ctb_width - sum;
sum = 0;
for (i = 0; i < pps->num_tile_rows - 1; i++) {
pps->row_height[i] = get_ue_golomb_long(gb) + 1;
sum += pps->row_height[i];
}
if (sum >= sps->ctb_height) {
av_log(s->avctx, AV_LOG_ERROR, "Invalid tile heights.\n");
ret = AVERROR_INVALIDDATA;
goto err;
}
pps->row_height[pps->num_tile_rows - 1] = sps->ctb_height - sum;
}
pps->loop_filter_across_tiles_enabled_flag = get_bits1(gb);
}
pps->seq_loop_filter_across_slices_enabled_flag = get_bits1(gb);
//是否存在去方块滤波的控制信息
pps->deblocking_filter_control_present_flag = get_bits1(gb);
if (pps->deblocking_filter_control_present_flag) {
pps->deblocking_filter_override_enabled_flag = get_bits1(gb);
//是否使用去方块滤波
pps->disable_dbf = get_bits1(gb);
if (!pps->disable_dbf) {
pps->beta_offset = get_se_golomb(gb) * 2;
pps->tc_offset = get_se_golomb(gb) * 2;
if (pps->beta_offset/2 < -6 || pps->beta_offset/2 > 6) {
av_log(s->avctx, AV_LOG_ERROR, "pps_beta_offset_div2 out of range: %d\n",
pps->beta_offset/2);
ret = AVERROR_INVALIDDATA;
goto err;
}
if (pps->tc_offset/2 < -6 || pps->tc_offset/2 > 6) {
av_log(s->avctx, AV_LOG_ERROR, "pps_tc_offset_div2 out of range: %d\n",
pps->tc_offset/2);
ret = AVERROR_INVALIDDATA;
goto err;
}
}
}
pps->scaling_list_data_present_flag = get_bits1(gb);
if (pps->scaling_list_data_present_flag) {
set_default_scaling_list_data(&pps->scaling_list);
ret = scaling_list_data(s, &pps->scaling_list, sps);
if (ret < 0)
goto err;
}
pps->lists_modification_present_flag = get_bits1(gb);
pps->log2_parallel_merge_level = get_ue_golomb_long(gb) + 2;
if (pps->log2_parallel_merge_level > sps->log2_ctb_size) {
av_log(s->avctx, AV_LOG_ERROR, "log2_parallel_merge_level_minus2 out of range: %d\n",
pps->log2_parallel_merge_level - 2);
ret = AVERROR_INVALIDDATA;
goto err;
}
pps->slice_header_extension_present_flag = get_bits1(gb);
if (get_bits1(gb)) { // pps_extension_present_flag
int pps_range_extensions_flag = get_bits1(gb);
/* int pps_extension_7bits = */ get_bits(gb, 7);
if (sps->ptl.general_ptl.profile_idc == FF_PROFILE_HEVC_REXT && pps_range_extensions_flag) {
if ((ret = pps_range_extensions(s, pps, sps)) < 0)
goto err;
}
}
// Inferred parameters
pps->col_bd = av_malloc_array(pps->num_tile_columns + 1, sizeof(*pps->col_bd));
pps->row_bd = av_malloc_array(pps->num_tile_rows + 1, sizeof(*pps->row_bd));
pps->col_idxX = av_malloc_array(sps->ctb_width, sizeof(*pps->col_idxX));
if (!pps->col_bd || !pps->row_bd || !pps->col_idxX) {
ret = AVERROR(ENOMEM);
goto err;
}
if (pps->uniform_spacing_flag) {
if (!pps->column_width) {
pps->column_width = av_malloc_array(pps->num_tile_columns, sizeof(*pps->column_width));
pps->row_height = av_malloc_array(pps->num_tile_rows, sizeof(*pps->row_height));
}
if (!pps->column_width || !pps->row_height) {
ret = AVERROR(ENOMEM);
goto err;
}
for (i = 0; i < pps->num_tile_columns; i++) {
pps->column_width[i] = ((i + 1) * sps->ctb_width) / pps->num_tile_columns -
(i * sps->ctb_width) / pps->num_tile_columns;
}
for (i = 0; i < pps->num_tile_rows; i++) {
pps->row_height[i] = ((i + 1) * sps->ctb_height) / pps->num_tile_rows -
(i * sps->ctb_height) / pps->num_tile_rows;
}
}
pps->col_bd[0] = 0;
for (i = 0; i < pps->num_tile_columns; i++)
pps->col_bd[i + 1] = pps->col_bd[i] + pps->column_width[i];
pps->row_bd[0] = 0;
for (i = 0; i < pps->num_tile_rows; i++)
pps->row_bd[i + 1] = pps->row_bd[i] + pps->row_height[i];
for (i = 0, j = 0; i < sps->ctb_width; i++) {
if (i > pps->col_bd[j])
j++;
pps->col_idxX[i] = j;
}
/**
* 6.5
*/
pic_area_in_ctbs = sps->ctb_width * sps->ctb_height;
pps->ctb_addr_rs_to_ts = av_malloc_array(pic_area_in_ctbs, sizeof(*pps->ctb_addr_rs_to_ts));
pps->ctb_addr_ts_to_rs = av_malloc_array(pic_area_in_ctbs, sizeof(*pps->ctb_addr_ts_to_rs));
pps->tile_id = av_malloc_array(pic_area_in_ctbs, sizeof(*pps->tile_id));
pps->min_tb_addr_zs_tab = av_malloc_array((sps->tb_mask+2) * (sps->tb_mask+2), sizeof(*pps->min_tb_addr_zs_tab));
if (!pps->ctb_addr_rs_to_ts || !pps->ctb_addr_ts_to_rs ||
!pps->tile_id || !pps->min_tb_addr_zs_tab) {
ret = AVERROR(ENOMEM);
goto err;
}
for (ctb_addr_rs = 0; ctb_addr_rs < pic_area_in_ctbs; ctb_addr_rs++) {
int tb_x = ctb_addr_rs % sps->ctb_width;
int tb_y = ctb_addr_rs / sps->ctb_width;
int tile_x = 0;
int tile_y = 0;
int val = 0;
for (i = 0; i < pps->num_tile_columns; i++) {
if (tb_x < pps->col_bd[i + 1]) {
tile_x = i;
break;
}
}
for (i = 0; i < pps->num_tile_rows; i++) {
if (tb_y < pps->row_bd[i + 1]) {
tile_y = i;
break;
}
}
for (i = 0; i < tile_x; i++)
val += pps->row_height[tile_y] * pps->column_width[i];
for (i = 0; i < tile_y; i++)
val += sps->ctb_width * pps->row_height[i];
val += (tb_y - pps->row_bd[tile_y]) * pps->column_width[tile_x] +
tb_x - pps->col_bd[tile_x];
pps->ctb_addr_rs_to_ts[ctb_addr_rs] = val;
pps->ctb_addr_ts_to_rs[val] = ctb_addr_rs;
}
for (j = 0, tile_id = 0; j < pps->num_tile_rows; j++)
for (i = 0; i < pps->num_tile_columns; i++, tile_id++)
for (y = pps->row_bd[j]; y < pps->row_bd[j + 1]; y++)
for (x = pps->col_bd[i]; x < pps->col_bd[i + 1]; x++)
pps->tile_id[pps->ctb_addr_rs_to_ts[y * sps->ctb_width + x]] = tile_id;
pps->tile_pos_rs = av_malloc_array(tile_id, sizeof(*pps->tile_pos_rs));
if (!pps->tile_pos_rs) {
ret = AVERROR(ENOMEM);
goto err;
}
for (j = 0; j < pps->num_tile_rows; j++)
for (i = 0; i < pps->num_tile_columns; i++)
pps->tile_pos_rs[j * pps->num_tile_columns + i] = pps->row_bd[j] * sps->ctb_width + pps->col_bd[i];
log2_diff_ctb_min_tb_size = sps->log2_ctb_size - sps->log2_min_tb_size;
pps->min_tb_addr_zs = &pps->min_tb_addr_zs_tab[1*(sps->tb_mask+2)+1];
for (y = 0; y < sps->tb_mask+2; y++) {
pps->min_tb_addr_zs_tab[y*(sps->tb_mask+2)] = -1;
pps->min_tb_addr_zs_tab[y] = -1;
}
for (y = 0; y < sps->tb_mask+1; y++) {
for (x = 0; x < sps->tb_mask+1; x++) {
int tb_x = x >> log2_diff_ctb_min_tb_size;
int tb_y = y >> log2_diff_ctb_min_tb_size;
int ctb_addr_rs = sps->ctb_width * tb_y + tb_x;
int val = pps->ctb_addr_rs_to_ts[ctb_addr_rs] <<
(log2_diff_ctb_min_tb_size * 2);
for (i = 0; i < log2_diff_ctb_min_tb_size; i++) {
int m = 1 << i;
val += (m & x ? m * m : 0) + (m & y ? 2 * m * m : 0);
}
pps->min_tb_addr_zs[y * (sps->tb_mask+2) + x] = val;
}
}
if (get_bits_left(gb) < 0) {
av_log(s->avctx, AV_LOG_ERROR,
"Overread PPS by %d bits\n", -get_bits_left(gb));
goto err;
}
av_buffer_unref(&s->pps_list[pps_id]);
s->pps_list[pps_id] = pps_buf;
return 0;
err:
av_buffer_unref(&pps_buf);
return ret;
}
与解析SPS类似,解析PPS源代码并不是很有“技术含量”。只要参考ITU-T的《H.264标准》就可以理解了,不再做过多详细的分析。
ff_hevc_decode_nal_sei()
ff_hevc_decode_nal_sei()用于解析HEVC码流中的SEI。该函数的定义位于libavcodec\hevc_sei.c,如下所示。//解析SEI
int ff_hevc_decode_nal_sei(HEVCContext *s)
{
int ret;
do {
//解析SEI信息
ret = decode_nal_sei_message(s);
if (ret < 0)
return(AVERROR(ENOMEM));
} while (more_rbsp_data(&s->HEVClc->gb));
return 1;
}
从源代码可以看出,ff_hevc_decode_nal_sei()在一个do while循环中调用了另外一个函数decode_nal_sei_message()解析SEI信息。
decode_nal_sei_message()
decode_nal_sei_message()用于解析SEI信息,它的定义如下。//解析SEI信息
static int decode_nal_sei_message(HEVCContext *s)
{
GetBitContext *gb = &s->HEVClc->gb;
int payload_type = 0;
int payload_size = 0;
int byte = 0xFF;
av_log(s->avctx, AV_LOG_DEBUG, "Decoding SEI\n");
while (byte == 0xFF) {
byte = get_bits(gb, 8);
payload_type += byte;
}
byte = 0xFF;
while (byte == 0xFF) {
byte = get_bits(gb, 8);
payload_size += byte;
}
if (s->nal_unit_type == NAL_SEI_PREFIX) {
if (payload_type == 256 /*&& s->decode_checksum_sei*/) {
decode_nal_sei_decoded_picture_hash(s);
} else if (payload_type == 45) {
decode_nal_sei_frame_packing_arrangement(s);
} else if (payload_type == 47) {
decode_nal_sei_display_orientation(s);
} else if (payload_type == 1){
int ret = decode_pic_timing(s);
av_log(s->avctx, AV_LOG_DEBUG, "Skipped PREFIX SEI %d\n", payload_type);
skip_bits(gb, 8 * payload_size);
return ret;
} else if (payload_type == 129){
active_parameter_sets(s);
av_log(s->avctx, AV_LOG_DEBUG, "Skipped PREFIX SEI %d\n", payload_type);
} else {
av_log(s->avctx, AV_LOG_DEBUG, "Skipped PREFIX SEI %d\n", payload_type);
skip_bits(gb, 8*payload_size);
}
} else { /* nal_unit_type == NAL_SEI_SUFFIX */
if (payload_type == 132 /* && s->decode_checksum_sei */)
decode_nal_sei_decoded_picture_hash(s);
else {
av_log(s->avctx, AV_LOG_DEBUG, "Skipped SUFFIX SEI %d\n", payload_type);
skip_bits(gb, 8 * payload_size);
}
}
return 1;
}
从源代码可以看出,decode_nal_sei_message()根据不同的payload_type调用不同的函数进行处理,例如调用decode_nal_sei_decoded_picture_hash(),decode_nal_sei_frame_packing_arrangement(),decode_nal_sei_display_orientation()等等。
雷霄骅
[email protected]
http://blog.csdn.net/leixiaohua1020