FFmpeg的HEVC解码器源代码简单分析:环路滤波(Loop Filter)
=====================================================
HEVC源代码分析文章列表:
【解码 -libavcodec HEVC 解码器】
FFmpeg的HEVC解码器源代码简单分析:概述
FFmpeg的HEVC解码器源代码简单分析:解析器(Parser)部分
FFmpeg的HEVC解码器源代码简单分析:解码器主干部分
FFmpeg的HEVC解码器源代码简单分析:CTU解码(CTU Decode)部分-PU
FFmpeg的HEVC解码器源代码简单分析:CTU解码(CTU Decode)部分-TU
FFmpeg的HEVC解码器源代码简单分析:环路滤波(LoopFilter)
=====================================================
本文分析FFmpeg的libavcodec中的HEVC解码器的环路滤波(Loop Filter)部分的源代码。FFmpeg的HEVC解码器调用hls_decode_entry()函数完成了Slice解码工作。hls_decode_entry()则调用了ff_hevc_hls_filters()完成了滤波工作。本文记录该函数实现的功能。
函数调用关系图
FFmpeg HEVC解码器的环路滤波(Loop Filter)部分在整个HEVC解码器中的位置如下图所示。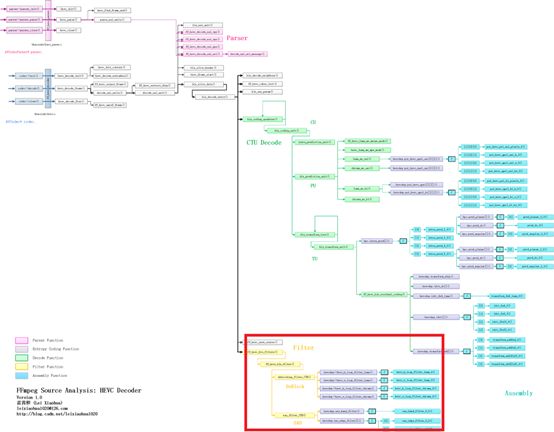
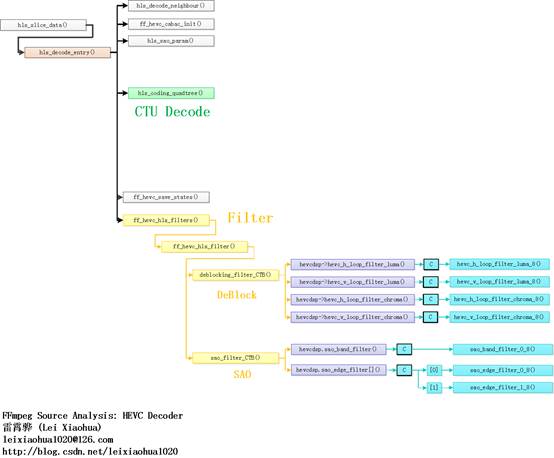
从源代码可以看出,滤波模块对应的函数是ff_hevc_hls_filters(),该函数调用了函数ff_hevc_hls_filter()(注意函数名称少了一个“s”)。ff_hevc_hls_filter()调用了两个函数完成了两种滤波工作:deblocking_filter_CTB()用于完成去块效应滤波,而sao_filter_CTB()用于完成SAO滤波。
hls_decode_entry()
hls_decode_entry()是FFmpeg HEVC解码器中Slice解码的入口函数。该函数的定义如下所示。/* * 解码入口函数 * * 注释:雷霄骅 * [email protected] * http://blog.csdn.net/leixiaohua1020 * */ static int hls_decode_entry(AVCodecContext *avctxt, void *isFilterThread) { HEVCContext *s = avctxt->priv_data; //CTB尺寸 int ctb_size = 1 << s->sps->log2_ctb_size; int more_data = 1; int x_ctb = 0; int y_ctb = 0; int ctb_addr_ts = s->pps->ctb_addr_rs_to_ts[s->sh.slice_ctb_addr_rs]; if (!ctb_addr_ts && s->sh.dependent_slice_segment_flag) { av_log(s->avctx, AV_LOG_ERROR, "Impossible initial tile.\n"); return AVERROR_INVALIDDATA; } if (s->sh.dependent_slice_segment_flag) { int prev_rs = s->pps->ctb_addr_ts_to_rs[ctb_addr_ts - 1]; if (s->tab_slice_address[prev_rs] != s->sh.slice_addr) { av_log(s->avctx, AV_LOG_ERROR, "Previous slice segment missing\n"); return AVERROR_INVALIDDATA; } } while (more_data && ctb_addr_ts < s->sps->ctb_size) { int ctb_addr_rs = s->pps->ctb_addr_ts_to_rs[ctb_addr_ts]; //CTB的位置x和y x_ctb = (ctb_addr_rs % ((s->sps->width + ctb_size - 1) >> s->sps->log2_ctb_size)) << s->sps->log2_ctb_size; y_ctb = (ctb_addr_rs / ((s->sps->width + ctb_size - 1) >> s->sps->log2_ctb_size)) << s->sps->log2_ctb_size; //初始化周围的参数 hls_decode_neighbour(s, x_ctb, y_ctb, ctb_addr_ts); //初始化CABAC ff_hevc_cabac_init(s, ctb_addr_ts); //样点自适应补偿参数 hls_sao_param(s, x_ctb >> s->sps->log2_ctb_size, y_ctb >> s->sps->log2_ctb_size); s->deblock[ctb_addr_rs].beta_offset = s->sh.beta_offset; s->deblock[ctb_addr_rs].tc_offset = s->sh.tc_offset; s->filter_slice_edges[ctb_addr_rs] = s->sh.slice_loop_filter_across_slices_enabled_flag; /* * CU示意图 * * 64x64块 * * 深度d=0 * split_flag=1时候划分为4个32x32 * * +--------+--------+--------+--------+--------+--------+--------+--------+ * | | * | | | * | | * + | + * | | * | | | * | | * + | + * | | * | | | * | | * + | + * | | * | | | * | | * + -- -- -- -- -- -- -- -- --+ -- -- -- -- -- -- -- -- --+ * | | | * | | * | | | * + + * | | | * | | * | | | * + + * | | | * | | * | | | * + + * | | | * | | * | | | * +--------+--------+--------+--------+--------+--------+--------+--------+ * * * 32x32 块 * 深度d=1 * split_flag=1时候划分为4个16x16 * * +--------+--------+--------+--------+ * | | * | | | * | | * + | + * | | * | | | * | | * + -- -- -- -- + -- -- -- -- + * | | * | | | * | | * + | + * | | * | | | * | | * +--------+--------+--------+--------+ * * * 16x16 块 * 深度d=2 * split_flag=1时候划分为4个8x8 * * +--------+--------+ * | | * | | | * | | * + -- --+ -- -- + * | | * | | | * | | * +--------+--------+ * * * 8x8块 * 深度d=3 * split_flag=1时候划分为4个4x4 * * +----+----+ * | | | * + -- + -- + * | | | * +----+----+ * */ /* * 解析四叉树结构,并且解码 * * hls_coding_quadtree(HEVCContext *s, int x0, int y0, int log2_cb_size, int cb_depth)中: * s:HEVCContext上下文结构体 * x_ctb:CB位置的x坐标 * y_ctb:CB位置的y坐标 * log2_cb_size:CB大小取log2之后的值 * cb_depth:深度 * */ more_data = hls_coding_quadtree(s, x_ctb, y_ctb, s->sps->log2_ctb_size, 0); if (more_data < 0) { s->tab_slice_address[ctb_addr_rs] = -1; return more_data; } ctb_addr_ts++; //保存解码信息以供下次使用 ff_hevc_save_states(s, ctb_addr_ts); //去块效应滤波 ff_hevc_hls_filters(s, x_ctb, y_ctb, ctb_size); } if (x_ctb + ctb_size >= s->sps->width && y_ctb + ctb_size >= s->sps->height) ff_hevc_hls_filter(s, x_ctb, y_ctb, ctb_size); return ctb_addr_ts; }
从源代码可以看出,hls_decode_entry()主要调用了2个函数进行解码工作:
(1)调用hls_coding_quadtree()解码CTU。其中包含了PU和TU的解码。本文分析第二步的滤波过程。
(2)调用ff_hevc_hls_filters()进行滤波。其中包含了去块效应滤波和SAO滤波。
ff_hevc_hls_filters()
ff_hevc_hls_filters()用于完成滤波工作。该函数的定义如下所示。/* * 去块效应滤波 * * 注释:雷霄骅 * [email protected] * http://blog.csdn.net/leixiaohua1020 * */ void ff_hevc_hls_filters(HEVCContext *s, int x_ctb, int y_ctb, int ctb_size) { //是否是水平边缘上的CTU int x_end = x_ctb >= s->sps->width - ctb_size; //是否是垂直边缘上的CTU int y_end = y_ctb >= s->sps->height - ctb_size; /* * (x)代表解码序号为x的CTU的滤波的图像块 * * 右边界 * | | | | || * ---+--------+--------+--------+--------++ * | | | | || * | (a) | (b) | (c)1 | (c)2 || * | | | | || * ---+--------+--------+--------+--------++ * | | | | || * | | a | b | c || * | | | | || * ---+--------+--------+--------+--------++ * * 。。。。。。 * ---+--------+--------+--------+--------++ * | | | | || * | (d)1 | (e)1 | (f)1 | (f)2 || * | | | | || * ---+--------+--------+--------+--------++ * | | | | || * | (d)2 | d (e)2 | e (f)3 | f || * | | | | || * ---+--------+--------+--------+--------++ 下边界 * ---+--------+--------+--------+--------++ */ //对左上方CTU滤波 if (y_ctb && x_ctb) ff_hevc_hls_filter(s, x_ctb - ctb_size, y_ctb - ctb_size, ctb_size); //如果是右边界上的CTU,再对上方的CTU滤波 if (y_ctb && x_end) ff_hevc_hls_filter(s, x_ctb, y_ctb - ctb_size, ctb_size); //如果是下边界上的CTU,再对左边的CTU滤波 if (x_ctb && y_end) ff_hevc_hls_filter(s, x_ctb - ctb_size, y_ctb, ctb_size); }
从源代码可以看出,ff_hevc_hls_filters()调用了ff_hevc_hls_filter()完成了滤波工作。ff_hevc_hls_filters()对于当前需要进行滤波的CTU的位置进行了判断:一般情况下对当前CTU左上方的CTU进行滤波处理;如果当前CTU位于右边边界处,则再对当前CTU上面的CTU进行滤波处理;若果当前CTU位于下边边界处,则再对当前CTU左边的CTU进行滤波处理。
ff_hevc_hls_filter()
ff_hevc_hls_filter()完成了一个CTU的滤波工作。该函数的定义如下所示。//滤波
void ff_hevc_hls_filter(HEVCContext *s, int x, int y, int ctb_size)
{
int x_end = x >= s->sps->width - ctb_size;
//去块效应滤波器
deblocking_filter_CTB(s, x, y);
if (s->sps->sao_enabled) {
//SAO(采样自适应偏移)滤波器
int y_end = y >= s->sps->height - ctb_size;
if (y && x)
sao_filter_CTB(s, x - ctb_size, y - ctb_size);
if (x && y_end)
sao_filter_CTB(s, x - ctb_size, y);
if (y && x_end) {
sao_filter_CTB(s, x, y - ctb_size);
if (s->threads_type & FF_THREAD_FRAME )
ff_thread_report_progress(&s->ref->tf, y, 0);
}
if (x_end && y_end) {
sao_filter_CTB(s, x , y);
if (s->threads_type & FF_THREAD_FRAME )
ff_thread_report_progress(&s->ref->tf, y + ctb_size, 0);
}
} else if (s->threads_type & FF_THREAD_FRAME && x_end)
ff_thread_report_progress(&s->ref->tf, y + ctb_size - 4, 0);
}
从源代码可以看出,ff_hevc_hls_filter()调用了两种滤波函数:
(1)调用deblocking_filter_CTB()进行去块效应滤波
(2)调用sao_filter_CTB()进行SAO(采样自适应偏移)滤波
下面分别看一下这两个函数。
deblocking_filter_CTB()
deblocking_filter_CTB()完成了去块效应滤波。该函数的定义如下所示。//去块效应滤波器
static void deblocking_filter_CTB(HEVCContext *s, int x0, int y0)
{
uint8_t *src;
int x, y;
int chroma, beta;
int32_t c_tc[2], tc[2];
uint8_t no_p[2] = { 0 };
uint8_t no_q[2] = { 0 };
int log2_ctb_size = s->sps->log2_ctb_size;
int x_end, x_end2, y_end;
int ctb_size = 1 << log2_ctb_size;
int ctb = (x0 >> log2_ctb_size) +
(y0 >> log2_ctb_size) * s->sps->ctb_width;
int cur_tc_offset = s->deblock[ctb].tc_offset;
int cur_beta_offset = s->deblock[ctb].beta_offset;
int left_tc_offset, left_beta_offset;
int tc_offset, beta_offset;
int pcmf = (s->sps->pcm_enabled_flag &&
s->sps->pcm.loop_filter_disable_flag) ||
s->pps->transquant_bypass_enable_flag;
if (x0) {
left_tc_offset = s->deblock[ctb - 1].tc_offset;
left_beta_offset = s->deblock[ctb - 1].beta_offset;
} else {
left_tc_offset = 0;
left_beta_offset = 0;
}
x_end = x0 + ctb_size;
if (x_end > s->sps->width)
x_end = s->sps->width;
y_end = y0 + ctb_size;
if (y_end > s->sps->height)
y_end = s->sps->height;
tc_offset = cur_tc_offset;
beta_offset = cur_beta_offset;
x_end2 = x_end;
if (x_end2 != s->sps->width)
x_end2 -= 8;
for (y = y0; y < y_end; y += 8) {
// vertical filtering luma
// 滤波垂直边界的滤波器
//
// |
// P2 P1 P0 | Q0 Q1 Q2
// |
//
for (x = x0 ? x0 : 8; x < x_end; x += 8) {
/*
* 以8x8块为单位
*
* | | | |
* | | | |
* | | | |
* | | | |
* | | | |
*
*/
const int bs0 = s->vertical_bs[(x + y * s->bs_width) >> 2];
const int bs1 = s->vertical_bs[(x + (y + 4) * s->bs_width) >> 2];
if (bs0 || bs1) {
const int qp = (get_qPy(s, x - 1, y) + get_qPy(s, x, y) + 1) >> 1;
beta = betatable[av_clip(qp + beta_offset, 0, MAX_QP)];
tc[0] = bs0 ? TC_CALC(qp, bs0) : 0;
tc[1] = bs1 ? TC_CALC(qp, bs1) : 0;
src = &s->frame->data[LUMA][y * s->frame->linesize[LUMA] + (x << s->sps->pixel_shift)];
if (pcmf) {
no_p[0] = get_pcm(s, x - 1, y);
no_p[1] = get_pcm(s, x - 1, y + 4);
no_q[0] = get_pcm(s, x, y);
no_q[1] = get_pcm(s, x, y + 4);
s->hevcdsp.hevc_v_loop_filter_luma_c(src,
s->frame->linesize[LUMA],
beta, tc, no_p, no_q);
} else
s->hevcdsp.hevc_v_loop_filter_luma(src,
s->frame->linesize[LUMA],
beta, tc, no_p, no_q);
}
}
if(!y)
continue;
// horizontal filtering luma
// 滤波水平边界的滤波器
// P2
// P1
// P0
// -----------
// Q0
// Q1
// Q2
for (x = x0 ? x0 - 8 : 0; x < x_end2; x += 8) {
/*
* 以8x8块为单位
*
* ---------------
*
* ---------------
*
* ---------------
*
* ---------------
*
*/
const int bs0 = s->horizontal_bs[( x + y * s->bs_width) >> 2];
const int bs1 = s->horizontal_bs[((x + 4) + y * s->bs_width) >> 2];
if (bs0 || bs1) {
const int qp = (get_qPy(s, x, y - 1) + get_qPy(s, x, y) + 1) >> 1;
tc_offset = x >= x0 ? cur_tc_offset : left_tc_offset;
beta_offset = x >= x0 ? cur_beta_offset : left_beta_offset;
beta = betatable[av_clip(qp + beta_offset, 0, MAX_QP)];
tc[0] = bs0 ? TC_CALC(qp, bs0) : 0;
tc[1] = bs1 ? TC_CALC(qp, bs1) : 0;
src = &s->frame->data[LUMA][y * s->frame->linesize[LUMA] + (x << s->sps->pixel_shift)];
if (pcmf) {
no_p[0] = get_pcm(s, x, y - 1);
no_p[1] = get_pcm(s, x + 4, y - 1);
no_q[0] = get_pcm(s, x, y);
no_q[1] = get_pcm(s, x + 4, y);
s->hevcdsp.hevc_h_loop_filter_luma_c(src,
s->frame->linesize[LUMA],
beta, tc, no_p, no_q);
} else
s->hevcdsp.hevc_h_loop_filter_luma(src,
s->frame->linesize[LUMA],
beta, tc, no_p, no_q);
}
}
}
//色度滤波
for (chroma = 1; chroma <= 2; chroma++) {
int h = 1 << s->sps->hshift[chroma];
int v = 1 << s->sps->vshift[chroma];
// vertical filtering chroma
for (y = y0; y < y_end; y += (8 * v)) {
for (x = x0 ? x0 : 8 * h; x < x_end; x += (8 * h)) {
const int bs0 = s->vertical_bs[(x + y * s->bs_width) >> 2];
const int bs1 = s->vertical_bs[(x + (y + (4 * v)) * s->bs_width) >> 2];
if ((bs0 == 2) || (bs1 == 2)) {
const int qp0 = (get_qPy(s, x - 1, y) + get_qPy(s, x, y) + 1) >> 1;
const int qp1 = (get_qPy(s, x - 1, y + (4 * v)) + get_qPy(s, x, y + (4 * v)) + 1) >> 1;
c_tc[0] = (bs0 == 2) ? chroma_tc(s, qp0, chroma, tc_offset) : 0;
c_tc[1] = (bs1 == 2) ? chroma_tc(s, qp1, chroma, tc_offset) : 0;
src = &s->frame->data[chroma][(y >> s->sps->vshift[chroma]) * s->frame->linesize[chroma] + ((x >> s->sps->hshift[chroma]) << s->sps->pixel_shift)];
if (pcmf) {
no_p[0] = get_pcm(s, x - 1, y);
no_p[1] = get_pcm(s, x - 1, y + (4 * v));
no_q[0] = get_pcm(s, x, y);
no_q[1] = get_pcm(s, x, y + (4 * v));
s->hevcdsp.hevc_v_loop_filter_chroma_c(src,
s->frame->linesize[chroma],
c_tc, no_p, no_q);
} else
s->hevcdsp.hevc_v_loop_filter_chroma(src,
s->frame->linesize[chroma],
c_tc, no_p, no_q);
}
}
if(!y)
continue;
// horizontal filtering chroma
tc_offset = x0 ? left_tc_offset : cur_tc_offset;
x_end2 = x_end;
if (x_end != s->sps->width)
x_end2 = x_end - 8 * h;
for (x = x0 ? x0 - 8 * h : 0; x < x_end2; x += (8 * h)) {
const int bs0 = s->horizontal_bs[( x + y * s->bs_width) >> 2];
const int bs1 = s->horizontal_bs[((x + 4 * h) + y * s->bs_width) >> 2];
if ((bs0 == 2) || (bs1 == 2)) {
const int qp0 = bs0 == 2 ? (get_qPy(s, x, y - 1) + get_qPy(s, x, y) + 1) >> 1 : 0;
const int qp1 = bs1 == 2 ? (get_qPy(s, x + (4 * h), y - 1) + get_qPy(s, x + (4 * h), y) + 1) >> 1 : 0;
c_tc[0] = bs0 == 2 ? chroma_tc(s, qp0, chroma, tc_offset) : 0;
c_tc[1] = bs1 == 2 ? chroma_tc(s, qp1, chroma, cur_tc_offset) : 0;
src = &s->frame->data[chroma][(y >> s->sps->vshift[1]) * s->frame->linesize[chroma] + ((x >> s->sps->hshift[1]) << s->sps->pixel_shift)];
if (pcmf) {
no_p[0] = get_pcm(s, x, y - 1);
no_p[1] = get_pcm(s, x + (4 * h), y - 1);
no_q[0] = get_pcm(s, x, y);
no_q[1] = get_pcm(s, x + (4 * h), y);
s->hevcdsp.hevc_h_loop_filter_chroma_c(src,
s->frame->linesize[chroma],
c_tc, no_p, no_q);
} else
s->hevcdsp.hevc_h_loop_filter_chroma(src,
s->frame->linesize[chroma],
c_tc, no_p, no_q);
}
}
}
}
}
从源代码可以看出,deblocking_filter_CTB()是以8x8块为单位进行滤波的。该函数首先调用HEVCDSPContext->hevc_v_loop_filter_luma()汇编函数对亮度垂直边界进行滤波,然后调用HEVCDSPContext-> hevc_h_loop_filter_luma()汇编函数对亮度水平边界进行滤波,最后还会调用HEVCDSPContext-> hevc_v_loop_filter_chroma ()和HEVCDSPContext-> hevc_h_loop_filter_chroma()对色度垂直边界和水平边界进行滤波。
sao_filter_CTB()
sao_filter_CTB()完成了SAO(采样自适应偏移)滤波。该函数的定义如下所示。#define CTB(tab, x, y) ((tab)[(y) * s->sps->ctb_width + (x)])
//SAO(采样自适应偏移)滤波器
static void sao_filter_CTB(HEVCContext *s, int x, int y)
{
int c_idx;
int edges[4]; // 0 left 1 top 2 right 3 bottom
int x_ctb = x >> s->sps->log2_ctb_size;
int y_ctb = y >> s->sps->log2_ctb_size;
int ctb_addr_rs = y_ctb * s->sps->ctb_width + x_ctb;
int ctb_addr_ts = s->pps->ctb_addr_rs_to_ts[ctb_addr_rs];
SAOParams *sao = &CTB(s->sao, x_ctb, y_ctb);
// flags indicating unfilterable edges
uint8_t vert_edge[] = { 0, 0 };
uint8_t horiz_edge[] = { 0, 0 };
uint8_t diag_edge[] = { 0, 0, 0, 0 };
uint8_t lfase = CTB(s->filter_slice_edges, x_ctb, y_ctb);
uint8_t no_tile_filter = s->pps->tiles_enabled_flag &&
!s->pps->loop_filter_across_tiles_enabled_flag;
uint8_t restore = no_tile_filter || !lfase;
uint8_t left_tile_edge = 0;
uint8_t right_tile_edge = 0;
uint8_t up_tile_edge = 0;
uint8_t bottom_tile_edge = 0;
edges[0] = x_ctb == 0;
edges[1] = y_ctb == 0;
edges[2] = x_ctb == s->sps->ctb_width - 1;
edges[3] = y_ctb == s->sps->ctb_height - 1;
//位于图像边界处的特殊处理?
if (restore) {
if (!edges[0]) {
left_tile_edge = no_tile_filter && s->pps->tile_id[ctb_addr_ts] != s->pps->tile_id[s->pps->ctb_addr_rs_to_ts[ctb_addr_rs-1]];
vert_edge[0] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb - 1, y_ctb)) || left_tile_edge;
}
if (!edges[2]) {
right_tile_edge = no_tile_filter && s->pps->tile_id[ctb_addr_ts] != s->pps->tile_id[s->pps->ctb_addr_rs_to_ts[ctb_addr_rs+1]];
vert_edge[1] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb + 1, y_ctb)) || right_tile_edge;
}
if (!edges[1]) {
up_tile_edge = no_tile_filter && s->pps->tile_id[ctb_addr_ts] != s->pps->tile_id[s->pps->ctb_addr_rs_to_ts[ctb_addr_rs - s->sps->ctb_width]];
horiz_edge[0] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb, y_ctb - 1)) || up_tile_edge;
}
if (!edges[3]) {
bottom_tile_edge = no_tile_filter && s->pps->tile_id[ctb_addr_ts] != s->pps->tile_id[s->pps->ctb_addr_rs_to_ts[ctb_addr_rs + s->sps->ctb_width]];
horiz_edge[1] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb, y_ctb + 1)) || bottom_tile_edge;
}
if (!edges[0] && !edges[1]) {
diag_edge[0] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb - 1, y_ctb - 1)) || left_tile_edge || up_tile_edge;
}
if (!edges[1] && !edges[2]) {
diag_edge[1] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb + 1, y_ctb - 1)) || right_tile_edge || up_tile_edge;
}
if (!edges[2] && !edges[3]) {
diag_edge[2] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb + 1, y_ctb + 1)) || right_tile_edge || bottom_tile_edge;
}
if (!edges[0] && !edges[3]) {
diag_edge[3] = (!lfase && CTB(s->tab_slice_address, x_ctb, y_ctb) != CTB(s->tab_slice_address, x_ctb - 1, y_ctb + 1)) || left_tile_edge || bottom_tile_edge;
}
}
for (c_idx = 0; c_idx < 3; c_idx++) {
int x0 = x >> s->sps->hshift[c_idx];
int y0 = y >> s->sps->vshift[c_idx];
int stride_src = s->frame->linesize[c_idx];
int stride_dst = s->sao_frame->linesize[c_idx];
int ctb_size_h = (1 << (s->sps->log2_ctb_size)) >> s->sps->hshift[c_idx];
int ctb_size_v = (1 << (s->sps->log2_ctb_size)) >> s->sps->vshift[c_idx];
int width = FFMIN(ctb_size_h, (s->sps->width >> s->sps->hshift[c_idx]) - x0);
int height = FFMIN(ctb_size_v, (s->sps->height >> s->sps->vshift[c_idx]) - y0);
uint8_t *src = &s->frame->data[c_idx][y0 * stride_src + (x0 << s->sps->pixel_shift)];
uint8_t *dst = &s->sao_frame->data[c_idx][y0 * stride_dst + (x0 << s->sps->pixel_shift)];
//SAO滤波类型
switch (sao->type_idx[c_idx]) {
case SAO_BAND: //边带补偿
copy_CTB(dst, src, width << s->sps->pixel_shift, height, stride_dst, stride_src);
s->hevcdsp.sao_band_filter(src, dst,
stride_src, stride_dst,
sao,
edges, width,
height, c_idx);
restore_tqb_pixels(s, x, y, width, height, c_idx);
sao->type_idx[c_idx] = SAO_APPLIED;
break;
case SAO_EDGE: //边界补偿
{
uint8_t left_pixels = !edges[0] && (CTB(s->sao, x_ctb-1, y_ctb).type_idx[c_idx] != SAO_APPLIED);
if (!edges[1]) {
uint8_t top_left = !edges[0] && (CTB(s->sao, x_ctb-1, y_ctb-1).type_idx[c_idx] != SAO_APPLIED);
uint8_t top_right = !edges[2] && (CTB(s->sao, x_ctb+1, y_ctb-1).type_idx[c_idx] != SAO_APPLIED);
if (CTB(s->sao, x_ctb , y_ctb-1).type_idx[c_idx] == 0)
memcpy( dst - stride_dst - (top_left << s->sps->pixel_shift),
src - stride_src - (top_left << s->sps->pixel_shift),
(top_left + width + top_right) << s->sps->pixel_shift);
else {
if (top_left)
memcpy( dst - stride_dst - (1 << s->sps->pixel_shift),
src - stride_src - (1 << s->sps->pixel_shift),
1 << s->sps->pixel_shift);
if(top_right)
memcpy( dst - stride_dst + (width << s->sps->pixel_shift),
src - stride_src + (width << s->sps->pixel_shift),
1 << s->sps->pixel_shift);
}
}
if (!edges[3]) { // bottom and bottom right
uint8_t bottom_left = !edges[0] && (CTB(s->sao, x_ctb-1, y_ctb+1).type_idx[c_idx] != SAO_APPLIED);
memcpy( dst + height * stride_dst - (bottom_left << s->sps->pixel_shift),
src + height * stride_src - (bottom_left << s->sps->pixel_shift),
(width + 1 + bottom_left) << s->sps->pixel_shift);
}
copy_CTB(dst - (left_pixels << s->sps->pixel_shift),
src - (left_pixels << s->sps->pixel_shift),
(width + 1 + left_pixels) << s->sps->pixel_shift, height, stride_dst, stride_src);
s->hevcdsp.sao_edge_filter[restore](src, dst,
stride_src, stride_dst,
sao,
edges, width,
height, c_idx,
vert_edge,
horiz_edge,
diag_edge);
restore_tqb_pixels(s, x, y, width, height, c_idx);
sao->type_idx[c_idx] = SAO_APPLIED;
break;
}
}
}
}
从源代码可以看出,sao_filter_CTB()根据SAO滤波的类型不同作不同的处理:
(1)滤波类型为边带补偿SAO_BAND的时候,调用HEVCDSPContext-> sao_band_filter()进行滤波。
(2)滤波类型为边界补偿SAO_EDGE的时候,调用HEVCDSPContext-> sao_edge_filter()进行滤波。
环路滤波知识
本章记录HEVC中两种环路滤波技术:DeBlock(去块效应)滤波和SAO(样点自适应补偿)滤波。
DeBlock(去块效应)滤波
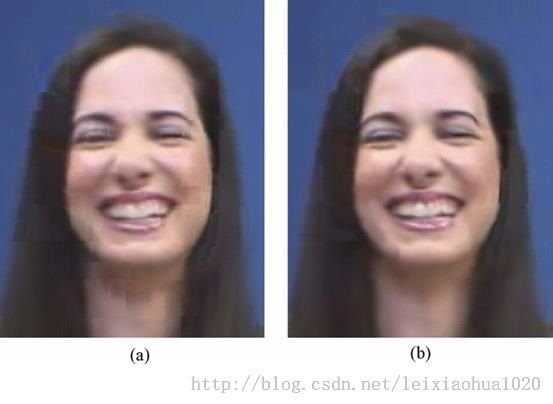
去块效应滤波器用于去除视频中的块效应。HEVC的去块效应滤波器和H.264中的去块效应滤波器是类似的。下面四幅图显示了HEVC中去块效应滤波器的效果。左边的两幅图是没有使用去块效应滤波器的解码图像,而右边的两幅图是使用了去块效应滤波器的图像。在HEVC中,去块效应滤波是以8x8的块为单位的,注意在实际处理的时候是将8x8的块边界上的像素分成2个4x4块独立进行处理的。 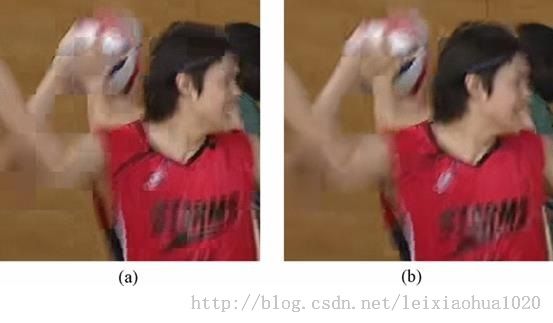
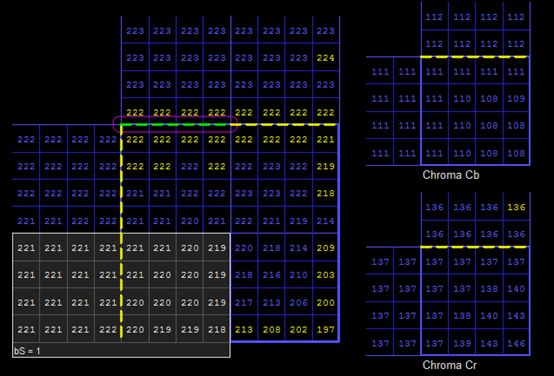
其中边界强度Bs会影响滤波过程中的阈值。边界强度Bs可以取值为0、1、2,该值越大代表滤波的强度越大。边界强度的判断依据来自于边界两边P和Q两个4x4块的信息。其判定方式如下:
条件(针对两边的图像块) |
Bs |
P或Q采用帧内预测 |
2 |
P或Q满足一项条件:有非0变换系数; 使用不同的参考帧;MV个数不同;MV差值的绝对值大于4。 |
1 |
其它 |
0 |
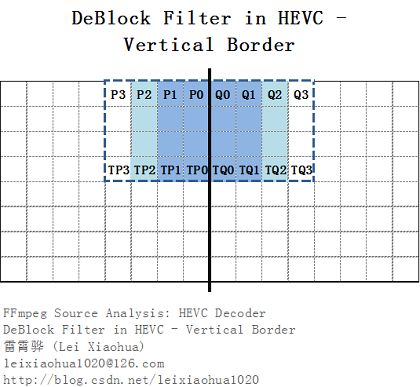
滤波开关决策
除了边界强度判断,滤波的过程中还包括了一个滤波开关决策。如果满足开关条件,才进行滤波。滤波开关决策判定的时候只取了P和Q最上面一行和最下面一行像素的值(P3、P2…等以及TP3、TP2…等)而没有使用中间两行像素的值,如下图所示。
滤波强弱的选择
“滤波强弱”和“边界强弱”要区分开。“边界强弱”影响滤波公式的阈值,而“滤波强弱”决定了滤波公式。滤波强弱可以分成强滤波和普通滤波两种。强滤波需要满足下面公式,否则就是普通滤波:
其中(1)(2)用于判断两边像素值变化率;(3)(4)用于判断两侧像素是否平坦;(5)(6)用于判断边界处像素跨度是否太大。beta的取值在前文已经叙述,tc的取值和beta类似,也是与两侧块的QP有关,可以通过查表得到,不再详细记录。
[强滤波]
强滤波会改变边界两边6个点的值,这些点的计算公式如下所示。可以看出P0、Q0的系数为(1,2,2,2,1)>>3;P1、Q1的系数为(1,1,1,1)>>2;P2、Q2的系数为(2,3,1,1,1)>>3。其中tc2=tc*2。
[普通滤波]
普通滤波会改变边界两边至多4个点的值。再滤波之前首先计算边界处像素的变化程度delta0来确定P0、Q0是否需要滤波:
SAO(样点自适应补偿)滤波
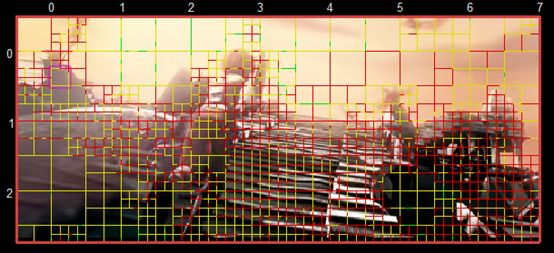
HEVC中允许使用较大的块进行DCT变换,这一方面能够提供更好的能量集中效果,但是另一方面在量化后却会带来更多的振铃效应。典型的振铃效应如下图所示。SAO(样点自适应补偿)滤波就是为消除这种振铃效应而设计的。它通过对重建图像的分类,对每一类图像像素值加减一个偏移,达到减少失真的目的。在HEVC中包含了两种像素值补偿方法:边界补偿(Edge Offset,EO)以及边带补偿(Band Offset,BO)。在HEVC中SAO是以CTU为基本单位的。
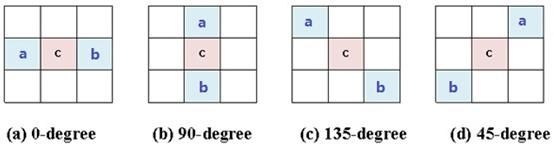
边界补偿通过比较和当前像素相邻的2个像素点的值,对像素点进行归类。然后将同类像素补偿同样的值。根据相邻像素的位置不同,边界补偿分成了4种模板:水平方向(EO_0)、垂直方向(EO_1)、135度方向(EO_2)、45度方向(EO_3)。这4种模板相邻像素的位置如下图所示。
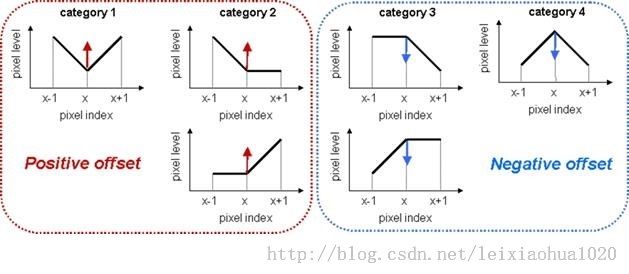
(1)种类1:c<a且c<b
(2)种类2:c<a且c==b,或者c==a且c<b
(3)种类3:c>a且c==b,或者c==a且c>b
(4)种类4:c>a且c<b
(5)种类5:其它
上述五种类型中的前4种的像素取值关系如下图所示。从图中可以看出:种类1的像素值为“凸”型,种类2的像素值为“半凸”型,种类3的像素值为“半凹”型,种类4的像素值为“凹”型。
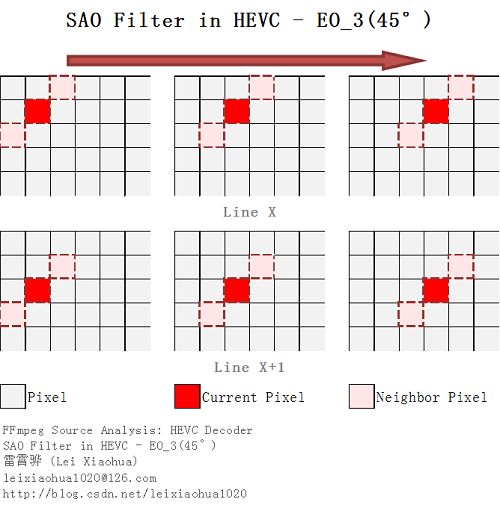
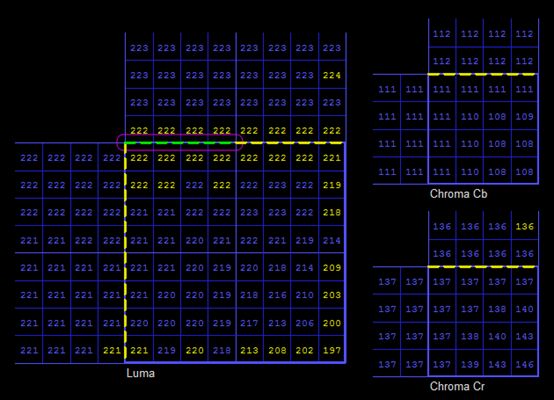
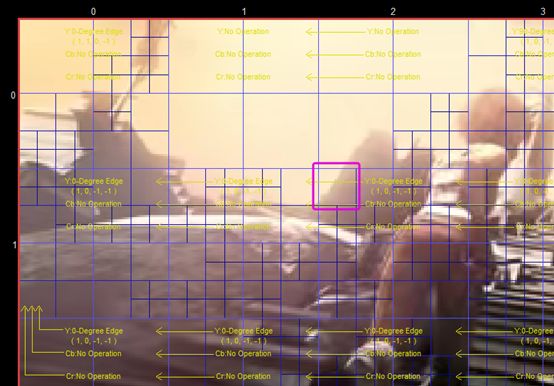
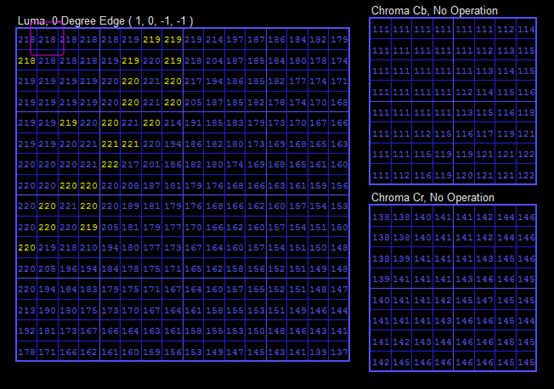
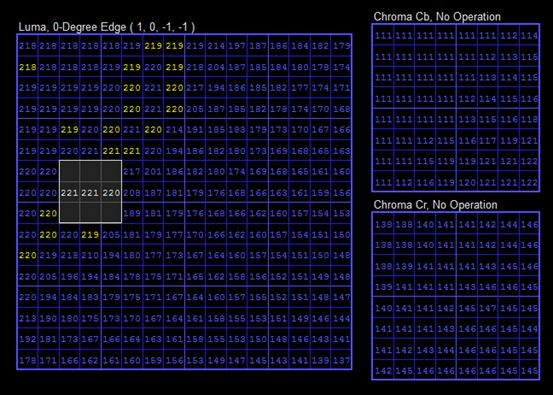
下图显示了解码时候的SAO滤波过程。图中选用了边界补偿(EO)方法的45度方向(EO_3)模板逐个比较每个像素,得到它们的分类,并将不同的分类叠加上不同的值。
边带补偿(BO)
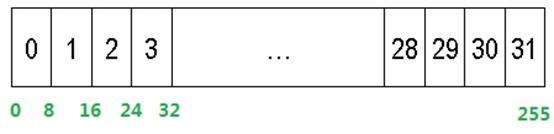
边带补偿根据像素值对像素进行归类。它将像素范围等分为32个边带。例如对于8bit图像来说,像素取值0-255,这样每个边带包含8个像素值,如下图所示。
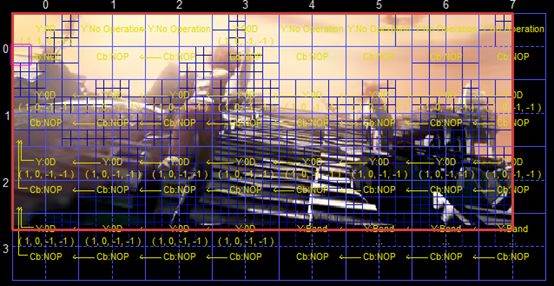
环路滤波实例
本节以一段《Sintel》动画的码流为例,看一下HEVC码流中的环路滤波相关的信息。
【去块效应滤波】下图为一个解码后的图像。


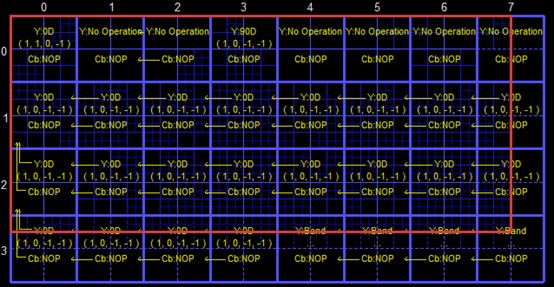
【SAO滤波】
下图为一个解码后的图像。

环路滤波相关的汇编函数
环路滤波相关的汇编函数位于HEVCDSPContext中。HEVCDSPContext的初始化函数是ff_hevc_dsp_init()。该函数对HEVCDSPContext结构体中的函数指针进行了赋值。FFmpeg HEVC解码器运行的过程中只要调用HEVCDSPContext的函数指针就可以完成相应的功能。ff_hevc_dsp_init()
ff_hevc_dsp_init()用于初始化HEVCDSPContext结构体中的汇编函数指针。该函数的定义如下所示。void ff_hevc_dsp_init(HEVCDSPContext *hevcdsp, int bit_depth)
{
#undef FUNC
#define FUNC(a, depth) a ## _ ## depth
#undef PEL_FUNC
#define PEL_FUNC(dst1, idx1, idx2, a, depth) \
for(i = 0 ; i < 10 ; i++) \
{ \
hevcdsp->dst1[i][idx1][idx2] = a ## _ ## depth; \
}
#undef EPEL_FUNCS
#define EPEL_FUNCS(depth) \
PEL_FUNC(put_hevc_epel, 0, 0, put_hevc_pel_pixels, depth); \
PEL_FUNC(put_hevc_epel, 0, 1, put_hevc_epel_h, depth); \
PEL_FUNC(put_hevc_epel, 1, 0, put_hevc_epel_v, depth); \
PEL_FUNC(put_hevc_epel, 1, 1, put_hevc_epel_hv, depth)
#undef EPEL_UNI_FUNCS
#define EPEL_UNI_FUNCS(depth) \
PEL_FUNC(put_hevc_epel_uni, 0, 0, put_hevc_pel_uni_pixels, depth); \
PEL_FUNC(put_hevc_epel_uni, 0, 1, put_hevc_epel_uni_h, depth); \
PEL_FUNC(put_hevc_epel_uni, 1, 0, put_hevc_epel_uni_v, depth); \
PEL_FUNC(put_hevc_epel_uni, 1, 1, put_hevc_epel_uni_hv, depth); \
PEL_FUNC(put_hevc_epel_uni_w, 0, 0, put_hevc_pel_uni_w_pixels, depth); \
PEL_FUNC(put_hevc_epel_uni_w, 0, 1, put_hevc_epel_uni_w_h, depth); \
PEL_FUNC(put_hevc_epel_uni_w, 1, 0, put_hevc_epel_uni_w_v, depth); \
PEL_FUNC(put_hevc_epel_uni_w, 1, 1, put_hevc_epel_uni_w_hv, depth)
#undef EPEL_BI_FUNCS
#define EPEL_BI_FUNCS(depth) \
PEL_FUNC(put_hevc_epel_bi, 0, 0, put_hevc_pel_bi_pixels, depth); \
PEL_FUNC(put_hevc_epel_bi, 0, 1, put_hevc_epel_bi_h, depth); \
PEL_FUNC(put_hevc_epel_bi, 1, 0, put_hevc_epel_bi_v, depth); \
PEL_FUNC(put_hevc_epel_bi, 1, 1, put_hevc_epel_bi_hv, depth); \
PEL_FUNC(put_hevc_epel_bi_w, 0, 0, put_hevc_pel_bi_w_pixels, depth); \
PEL_FUNC(put_hevc_epel_bi_w, 0, 1, put_hevc_epel_bi_w_h, depth); \
PEL_FUNC(put_hevc_epel_bi_w, 1, 0, put_hevc_epel_bi_w_v, depth); \
PEL_FUNC(put_hevc_epel_bi_w, 1, 1, put_hevc_epel_bi_w_hv, depth)
#undef QPEL_FUNCS
#define QPEL_FUNCS(depth) \
PEL_FUNC(put_hevc_qpel, 0, 0, put_hevc_pel_pixels, depth); \
PEL_FUNC(put_hevc_qpel, 0, 1, put_hevc_qpel_h, depth); \
PEL_FUNC(put_hevc_qpel, 1, 0, put_hevc_qpel_v, depth); \
PEL_FUNC(put_hevc_qpel, 1, 1, put_hevc_qpel_hv, depth)
#undef QPEL_UNI_FUNCS
#define QPEL_UNI_FUNCS(depth) \
PEL_FUNC(put_hevc_qpel_uni, 0, 0, put_hevc_pel_uni_pixels, depth); \
PEL_FUNC(put_hevc_qpel_uni, 0, 1, put_hevc_qpel_uni_h, depth); \
PEL_FUNC(put_hevc_qpel_uni, 1, 0, put_hevc_qpel_uni_v, depth); \
PEL_FUNC(put_hevc_qpel_uni, 1, 1, put_hevc_qpel_uni_hv, depth); \
PEL_FUNC(put_hevc_qpel_uni_w, 0, 0, put_hevc_pel_uni_w_pixels, depth); \
PEL_FUNC(put_hevc_qpel_uni_w, 0, 1, put_hevc_qpel_uni_w_h, depth); \
PEL_FUNC(put_hevc_qpel_uni_w, 1, 0, put_hevc_qpel_uni_w_v, depth); \
PEL_FUNC(put_hevc_qpel_uni_w, 1, 1, put_hevc_qpel_uni_w_hv, depth)
#undef QPEL_BI_FUNCS
#define QPEL_BI_FUNCS(depth) \
PEL_FUNC(put_hevc_qpel_bi, 0, 0, put_hevc_pel_bi_pixels, depth); \
PEL_FUNC(put_hevc_qpel_bi, 0, 1, put_hevc_qpel_bi_h, depth); \
PEL_FUNC(put_hevc_qpel_bi, 1, 0, put_hevc_qpel_bi_v, depth); \
PEL_FUNC(put_hevc_qpel_bi, 1, 1, put_hevc_qpel_bi_hv, depth); \
PEL_FUNC(put_hevc_qpel_bi_w, 0, 0, put_hevc_pel_bi_w_pixels, depth); \
PEL_FUNC(put_hevc_qpel_bi_w, 0, 1, put_hevc_qpel_bi_w_h, depth); \
PEL_FUNC(put_hevc_qpel_bi_w, 1, 0, put_hevc_qpel_bi_w_v, depth); \
PEL_FUNC(put_hevc_qpel_bi_w, 1, 1, put_hevc_qpel_bi_w_hv, depth)
#define HEVC_DSP(depth) \
hevcdsp->put_pcm = FUNC(put_pcm, depth); \
hevcdsp->transform_add[0] = FUNC(transform_add4x4, depth); \
hevcdsp->transform_add[1] = FUNC(transform_add8x8, depth); \
hevcdsp->transform_add[2] = FUNC(transform_add16x16, depth); \
hevcdsp->transform_add[3] = FUNC(transform_add32x32, depth); \
hevcdsp->transform_skip = FUNC(transform_skip, depth); \
hevcdsp->transform_rdpcm = FUNC(transform_rdpcm, depth); \
hevcdsp->idct_4x4_luma = FUNC(transform_4x4_luma, depth); \
hevcdsp->idct[0] = FUNC(idct_4x4, depth); \
hevcdsp->idct[1] = FUNC(idct_8x8, depth); \
hevcdsp->idct[2] = FUNC(idct_16x16, depth); \
hevcdsp->idct[3] = FUNC(idct_32x32, depth); \
\
hevcdsp->idct_dc[0] = FUNC(idct_4x4_dc, depth); \
hevcdsp->idct_dc[1] = FUNC(idct_8x8_dc, depth); \
hevcdsp->idct_dc[2] = FUNC(idct_16x16_dc, depth); \
hevcdsp->idct_dc[3] = FUNC(idct_32x32_dc, depth); \
\
hevcdsp->sao_band_filter = FUNC(sao_band_filter_0, depth); \
hevcdsp->sao_edge_filter[0] = FUNC(sao_edge_filter_0, depth); \
hevcdsp->sao_edge_filter[1] = FUNC(sao_edge_filter_1, depth); \
\
QPEL_FUNCS(depth); \
QPEL_UNI_FUNCS(depth); \
QPEL_BI_FUNCS(depth); \
EPEL_FUNCS(depth); \
EPEL_UNI_FUNCS(depth); \
EPEL_BI_FUNCS(depth); \
\
hevcdsp->hevc_h_loop_filter_luma = FUNC(hevc_h_loop_filter_luma, depth); \
hevcdsp->hevc_v_loop_filter_luma = FUNC(hevc_v_loop_filter_luma, depth); \
hevcdsp->hevc_h_loop_filter_chroma = FUNC(hevc_h_loop_filter_chroma, depth); \
hevcdsp->hevc_v_loop_filter_chroma = FUNC(hevc_v_loop_filter_chroma, depth); \
hevcdsp->hevc_h_loop_filter_luma_c = FUNC(hevc_h_loop_filter_luma, depth); \
hevcdsp->hevc_v_loop_filter_luma_c = FUNC(hevc_v_loop_filter_luma, depth); \
hevcdsp->hevc_h_loop_filter_chroma_c = FUNC(hevc_h_loop_filter_chroma, depth); \
hevcdsp->hevc_v_loop_filter_chroma_c = FUNC(hevc_v_loop_filter_chroma, depth)
int i = 0;
switch (bit_depth) {
case 9:
HEVC_DSP(9);
break;
case 10:
HEVC_DSP(10);
break;
case 12:
HEVC_DSP(12);
break;
default:
HEVC_DSP(8);
break;
}
if (ARCH_X86)
ff_hevc_dsp_init_x86(hevcdsp, bit_depth);
}
从源代码可以看出,ff_hevc_dsp_init()函数中包含一个名为“HEVC_DSP(depth)”的很长的宏定义。该宏定义中包含了C语言版本的各种函数的初始化代码。ff_hevc_dsp_init()会根据系统的颜色位深bit_depth初始化相应的C语言版本的函数。在函数的末尾则包含了汇编函数的初始化函数:如果系统是X86架构的,则会调用ff_hevc_dsp_init_x86()初始化X86平台下经过汇编优化的函数。下面以8bit颜色位深为例,看一下“HEVC_DSP(8)”的展开结果中和环路滤波相关的函数。
hevcdsp->sao_band_filter = sao_band_filter_0_8;
hevcdsp->sao_edge_filter[0] = sao_edge_filter_0_8;
hevcdsp->sao_edge_filter[1] = sao_edge_filter_1_8;
hevcdsp->hevc_h_loop_filter_luma = hevc_h_loop_filter_luma_8;
hevcdsp->hevc_v_loop_filter_luma = hevc_v_loop_filter_luma_8;
hevcdsp->hevc_h_loop_filter_chroma = hevc_h_loop_filter_chroma_8;
hevcdsp->hevc_v_loop_filter_chroma = hevc_v_loop_filter_chroma_8;
hevcdsp->hevc_h_loop_filter_luma_c = hevc_h_loop_filter_luma_8;
hevcdsp->hevc_v_loop_filter_luma_c = hevc_v_loop_filter_luma_8;
hevcdsp->hevc_h_loop_filter_chroma_c = hevc_h_loop_filter_chroma_8;
hevcdsp->hevc_v_loop_filter_chroma_c = hevc_v_loop_filter_chroma_8通过上述代码可以总结出下面几个用于环路滤波的函数:
HEVCDSPContext->sao_band_filter():SAO滤波边带补偿函数。C语言版本函数为sao_band_filter_0_8()下文例举其中的几个函数进行分析。
HEVCDSPContext->sao_edge_filter[]():SAO滤波边界补偿函数。C语言版本函数为sao_edge_filter_0_8()等
HEVCDSPContext-> hevc_h_loop_filter_luma():去块效应滤波水平边界亮度处理函数。C语言版本函数为hevc_h_loop_filter_luma_8()
HEVCDSPContext-> hevc_v_loop_filter_luma():去块效应滤波垂直边界亮度处理函数。C语言版本函数为hevc_v_loop_filter_luma_8()
HEVCDSPContext-> hevc_h_loop_filter_chroma():去块效应滤波水平边界色度处理函数。C语言版本函数为hevc_h_loop_filter_chroma_8()
HEVCDSPContext-> hevc_v_loop_filter_chroma():去块效应滤波水平边界色度处理函数。C语言版本函数为hevc_v_loop_filter_chroma_8()
去块效应滤波器汇编函数
下面记录一下C语言版本去块效应滤波器亮度处理函数hevc_v_loop_filter_luma_8()和hevc_h_loop_filter_luma_8()。
hevc_v_loop_filter_luma_8()
hevc_v_loop_filter_luma_8()是处理垂直边界亮度数据的去块效应滤波器。该函数的定义如下所示。//滤波垂直边界的滤波器
//
// |
// P2 P1 P0 | Q0 Q1 Q2
// |
//
static void FUNC(hevc_v_loop_filter_luma)(uint8_t *pix, ptrdiff_t stride,
int beta, int32_t *tc, uint8_t *no_p,
uint8_t *no_q)
{
//xstrice=1
//ystride=stride
FUNC(hevc_loop_filter_luma)(pix, sizeof(pixel), stride,
beta, tc, no_p, no_q);
}
从源代码可以看出,hevc_v_loop_filter_luma_8()调用了另一个函数hevc_loop_filter_luma_8()。需要注意传递给hevc_loop_filter_luma_8()的第2个参数stride取值为1,而第3个参数ystride取值为stride。
hevc_loop_filter_luma_8()
hevc_loop_filter_luma_8()完成了具体的去块效应滤波工作。该函数的定义如下所示。/*
* 滤波开关决策点
*
* P(4x4) Q(4x4)
* +----------------++-----------------+
* (0) | P3 P2 P1 P0 || Q0 Q1 Q2 Q3 |
* (1) | || |
* (2) | || |
* (3) |TP3 TP2 TP1 TP0 || TQ0 TQ1 TQ2 TQ3 |
* +----------------++-----------------+
*
*/
// line zero
//第0行(边界两边4x4块的第1行)
#define P3 pix[-4 * xstride]
#define P2 pix[-3 * xstride]
#define P1 pix[-2 * xstride]
#define P0 pix[-1 * xstride]
#define Q0 pix[0 * xstride]
#define Q1 pix[1 * xstride]
#define Q2 pix[2 * xstride]
#define Q3 pix[3 * xstride]
// line three. used only for deblocking decision
//第3行(边界两边4x4块的最后1行)
#define TP3 pix[-4 * xstride + 3 * ystride]
#define TP2 pix[-3 * xstride + 3 * ystride]
#define TP1 pix[-2 * xstride + 3 * ystride]
#define TP0 pix[-1 * xstride + 3 * ystride]
#define TQ0 pix[0 * xstride + 3 * ystride]
#define TQ1 pix[1 * xstride + 3 * ystride]
#define TQ2 pix[2 * xstride + 3 * ystride]
#define TQ3 pix[3 * xstride + 3 * ystride]
//环路滤波器-亮度
static void FUNC(hevc_loop_filter_luma)(uint8_t *_pix,
ptrdiff_t _xstride, ptrdiff_t _ystride,
int beta, int *_tc,
uint8_t *_no_p, uint8_t *_no_q)
{
/*
* 去块效应滤波是对8x8的块边界进行处理
* 边界强度是通过位于边界两边4x4的块P、Q来判断
*
* 【水平边界】
* ystride=1
* +----+----+
* | |
* +----+ +
* | P | |
* +----+----+
* | Q | |
* +----+ +
* | |
* +----+----+
*
* 【垂直边界】
* xstride=1
* +----+----+----+----+
* | | P | Q | |
* | +----+----+ |
* | | |
* +----+----+----+----+
*
*/
int d, j;
pixel *pix = (pixel *)_pix;
ptrdiff_t xstride = _xstride / sizeof(pixel);
ptrdiff_t ystride = _ystride / sizeof(pixel);
beta <<= BIT_DEPTH - 8;
for (j = 0; j < 2; j++) {
//都是用于滤波开关决策
//dp0,dq0,dp3,dq3都代表了像素值的变化率
//例如dp0=abs((P2-P1)-(P1-P0))=abs(P2 - 2 * P1 + P0)
//P块0行变化率
const int dp0 = abs(P2 - 2 * P1 + P0);
//Q块0行变化率
const int dq0 = abs(Q2 - 2 * Q1 + Q0);
//P块3行变化率
const int dp3 = abs(TP2 - 2 * TP1 + TP0);
//Q块3行变化率
const int dq3 = abs(TQ2 - 2 * TQ1 + TQ0);
const int d0 = dp0 + dq0;
const int d3 = dp3 + dq3;
const int tc = _tc[j] << (BIT_DEPTH - 8);
const int no_p = _no_p[j];
const int no_q = _no_q[j];
//纹理度Cb=d0+d3=dp0+dq0+dp3+dq3
//Cb代表了区域的平坦程度,当区域很不平坦的时候,就不用滤波了
if (d0 + d3 >= beta) {
pix += 4 * ystride;
continue;
} else {
const int beta_3 = beta >> 3;
const int beta_2 = beta >> 2;
const int tc25 = ((tc * 5 + 1) >> 1);
//判断是否满足强滤波条件
if (abs(P3 - P0) + abs(Q3 - Q0) < beta_3 && abs(P0 - Q0) < tc25 &&
abs(TP3 - TP0) + abs(TQ3 - TQ0) < beta_3 && abs(TP0 - TQ0) < tc25 &&
(d0 << 1) < beta_2 && (d3 << 1) < beta_2) {
// strong filtering
// 强滤波
// 修改边界两边一共6个点的像素-一共涉及到8个点的计算
// av_clip() 用于限幅
const int tc2 = tc << 1;
// 循环滤波4个点
for (d = 0; d < 4; d++) {
const int p3 = P3;
const int p2 = P2;
const int p1 = P1;
const int p0 = P0;
const int q0 = Q0;
const int q1 = Q1;
const int q2 = Q2;
const int q3 = Q3;
//p和q的滤波公式
if (!no_p) {
P0 = p0 + av_clip(((p2 + 2 * p1 + 2 * p0 + 2 * q0 + q1 + 4) >> 3) - p0, -tc2, tc2);
P1 = p1 + av_clip(((p2 + p1 + p0 + q0 + 2) >> 2) - p1, -tc2, tc2);
P2 = p2 + av_clip(((2 * p3 + 3 * p2 + p1 + p0 + q0 + 4) >> 3) - p2, -tc2, tc2);
}
if (!no_q) {
Q0 = q0 + av_clip(((p1 + 2 * p0 + 2 * q0 + 2 * q1 + q2 + 4) >> 3) - q0, -tc2, tc2);
Q1 = q1 + av_clip(((p0 + q0 + q1 + q2 + 2) >> 2) - q1, -tc2, tc2);
Q2 = q2 + av_clip(((2 * q3 + 3 * q2 + q1 + q0 + p0 + 4) >> 3) - q2, -tc2, tc2);
}
pix += ystride;
}
} else {
// normal filtering
// 普通滤波
// 修改边界两边一共4个点的像素-一共涉及到6个点的计算
int nd_p = 1;
int nd_q = 1;
const int tc_2 = tc >> 1;
if (dp0 + dp3 < ((beta + (beta >> 1)) >> 3))
nd_p = 2;
if (dq0 + dq3 < ((beta + (beta >> 1)) >> 3))
nd_q = 2;
for (d = 0; d < 4; d++) {
const int p2 = P2;
const int p1 = P1;
const int p0 = P0;
const int q0 = Q0;
const int q1 = Q1;
const int q2 = Q2;
int delta0 = (9 * (q0 - p0) - 3 * (q1 - p1) + 8) >> 4;
//判断该行像素是否需要修正
//delta0较大,说明边界处变化程度较大,则不需要修正
if (abs(delta0) < 10 * tc) {
delta0 = av_clip(delta0, -tc, tc);
//修正P0和Q0
if (!no_p)
P0 = av_clip_pixel(p0 + delta0);
if (!no_q)
Q0 = av_clip_pixel(q0 - delta0);
//修正P1和Q1
if (!no_p && nd_p > 1) {
const int deltap1 = av_clip((((p2 + p0 + 1) >> 1) - p1 + delta0) >> 1, -tc_2, tc_2);
P1 = av_clip_pixel(p1 + deltap1);
}
if (!no_q && nd_q > 1) {
const int deltaq1 = av_clip((((q2 + q0 + 1) >> 1) - q1 - delta0) >> 1, -tc_2, tc_2);
Q1 = av_clip_pixel(q1 + deltaq1);
}
}
pix += ystride;
}
}
}
}
}
从源代码中可以看出,hevc_loop_filter_luma_8()完成了前文记录的去块效应滤波的公式。由于源代码中已经做了比较详细的注释,在这里就不在详细叙述了。
hevc_h_loop_filter_luma_8()
hevc_h_loop_filter_luma_8()是处理水平边界亮度数据的去块效应滤波器。该函数的定义如下所示。//滤波水平边界的滤波器
// P2
// P1
// P0
// -----------
// Q0
// Q1
// Q2
static void FUNC(hevc_h_loop_filter_luma)(uint8_t *pix, ptrdiff_t stride,
int beta, int32_t *tc, uint8_t *no_p,
uint8_t *no_q)
{
//xstrice=stride
//ystride=1
FUNC(hevc_loop_filter_luma)(pix, stride, sizeof(pixel),
beta, tc, no_p, no_q);
}
从源代码可以看出,hevc_h_loop_filter_luma_8()和hevc_v_loop_filter_luma_8()的逻辑是类似的,都调用了hevc_loop_filter_luma_8()。唯一的不同在于它传递给hevc_loop_filter_luma_8()的第2个参数stride取值为stride,而第3个参数ystride取值为1。
SAO(采样自适应偏移)滤波器汇编函数
下面记录一下C语言版SAO滤波器边界补偿函数sao_edge_filter_0_8()和边带补偿函数sao_band_filter_0_8()。sao_edge_filter_0_8()
sao_edge_filter_0_8()用于进行SAO滤波中的边界补偿。该函数的定义如下所示。//SAO滤波-边界补偿-0
static void FUNC(sao_edge_filter_0)(uint8_t *_dst, uint8_t *_src,
ptrdiff_t stride_dst, ptrdiff_t stride_src, SAOParams *sao,
int *borders, int _width, int _height,
int c_idx, uint8_t *vert_edge,
uint8_t *horiz_edge, uint8_t *diag_edge)
{
int x, y;
pixel *dst = (pixel *)_dst;
pixel *src = (pixel *)_src;
int16_t *sao_offset_val = sao->offset_val[c_idx];
int sao_eo_class = sao->eo_class[c_idx];
int init_x = 0, init_y = 0, width = _width, height = _height;
stride_dst /= sizeof(pixel);
stride_src /= sizeof(pixel);
if (sao_eo_class != SAO_EO_VERT) {
if (borders[0]) {
int offset_val = sao_offset_val[0];
for (y = 0; y < height; y++) {
dst[y * stride_dst] = av_clip_pixel(src[y * stride_src] + offset_val);
}
init_x = 1;
}
if (borders[2]) {
int offset_val = sao_offset_val[0];
int offset = width - 1;
for (x = 0; x < height; x++) {
dst[x * stride_dst + offset] = av_clip_pixel(src[x * stride_src + offset] + offset_val);
}
width--;
}
}
if (sao_eo_class != SAO_EO_HORIZ) {
if (borders[1]) {
int offset_val = sao_offset_val[0];
for (x = init_x; x < width; x++)
dst[x] = av_clip_pixel(src[x] + offset_val);
init_y = 1;
}
if (borders[3]) {
int offset_val = sao_offset_val[0];
int y_stride_dst = stride_dst * (height - 1);
int y_stride_src = stride_src * (height - 1);
for (x = init_x; x < width; x++)
dst[x + y_stride_dst] = av_clip_pixel(src[x + y_stride_src] + offset_val);
height--;
}
}
//边界补偿-内部函数
FUNC(sao_edge_filter)((uint8_t *)dst, (uint8_t *)src, stride_dst, stride_src, sao, width, height, c_idx, init_x, init_y);
}
从源代码可以看出,sao_edge_filter_0_8()调用了另外一个函数sao_edge_filter_8()完成具体的滤波工作。
sao_edge_filter_8()
sao_edge_filter_8()完成了具体的边带补偿工作。该函数的定义如下所示。#define CMP(a, b) ((a) > (b) ? 1 : ((a) == (b) ? 0 : -1))
//SAO滤波-边界补偿-内部函数
static void FUNC(sao_edge_filter)(uint8_t *_dst, uint8_t *_src,
ptrdiff_t stride_dst, ptrdiff_t stride_src, SAOParams *sao,
int width, int height,
int c_idx, int init_x, int init_y) {
static const uint8_t edge_idx[] = { 1, 2, 0, 3, 4 };
//4种边界补偿的方向信息
static const int8_t pos[4][2][2] = {
{ { -1, 0 }, { 1, 0 } }, // horizontal
{ { 0, -1 }, { 0, 1 } }, // vertical
{ { -1, -1 }, { 1, 1 } }, // 45 degree
{ { 1, -1 }, { -1, 1 } }, // 135 degree
};
//存储了补偿的数值
int16_t *sao_offset_val = sao->offset_val[c_idx];
//边界补偿模式,水平EO_0,垂直EO_1,135度EO_2,45度EO_3,
int sao_eo_class = sao->eo_class[c_idx];
pixel *dst = (pixel *)_dst;
pixel *src = (pixel *)_src;
int y_stride_src = init_y * stride_src;
int y_stride_dst = init_y * stride_dst;
//取出pos[]数组中的值
//例如边界补偿为EO_2的时候
// pos_0_0=-1
// pos_0_1=-1
// pos_1_0=1
// pos_1_1=1
//
int pos_0_0 = pos[sao_eo_class][0][0];
int pos_0_1 = pos[sao_eo_class][0][1];
int pos_1_0 = pos[sao_eo_class][1][0];
int pos_1_1 = pos[sao_eo_class][1][1];
int x, y;
//例如边界补偿为EO_2的时候
// y_stride_0_1=(init_y - 1) * stride_src
// y_stride_1_1=(init_y + 1) * stride_src
//
int y_stride_0_1 = (init_y + pos_0_1) * stride_src;
int y_stride_1_1 = (init_y + pos_1_1) * stride_src;
//依次处理每个点
for (y = init_y; y < height; y++) {
for (x = init_x; x < width; x++) {
/*
* EO_2的时候
*
* 1
* X
* 2
*
* x lines
* | |
* 1: src[x + pos_0_0 + y_stride_0_1]
* 2: src[x + pos_1_0 + y_stride_1_1]
*
*/
//CMP(a,b)的结果。若a>b则取1,a==b择取0,a<b择取-1
int diff0 = CMP(src[x + y_stride_src], src[x + pos_0_0 + y_stride_0_1]);
int diff1 = CMP(src[x + y_stride_src], src[x + pos_1_0 + y_stride_1_1]);
//根据取值判断像素类型:(1)"\/" (2)"\_"或"_/" (3)"/ˉ"或"ˉ\" (4)"/\" (5)其它
int offset_val = edge_idx[2 + diff0 + diff1];
//补偿,从sao_offset_val[]中取值
dst[x + y_stride_dst] = av_clip_pixel(src[x + y_stride_src] + sao_offset_val[offset_val]);
}
y_stride_src += stride_src;
y_stride_dst += stride_dst;
y_stride_0_1 += stride_src;
y_stride_1_1 += stride_src;
}
}
从源代码中可以看出,sao_edge_filter_8()完成了前文记录的SAO滤波中的边带补偿功能。由于源代码中已经做了比较详细的注释,在这里就不在详细叙述了。
sao_band_filter_0_8()
sao_band_filter_0_8()用于进行SAO滤波中的边带补偿。该函数的定义如下所示。//SAO滤波-边带补偿
static void FUNC(sao_band_filter_0)(uint8_t *_dst, uint8_t *_src,
ptrdiff_t stride_dst, ptrdiff_t stride_src, SAOParams *sao,
int *borders, int width, int height,
int c_idx)
{
pixel *dst = (pixel *)_dst;
pixel *src = (pixel *)_src;
int offset_table[32] = { 0 };
int k, y, x;
int shift = BIT_DEPTH - 5;
//4条连续边带的补偿值
int16_t *sao_offset_val = sao->offset_val[c_idx];
//需要补偿的边带序号
int sao_left_class = sao->band_position[c_idx];
stride_dst /= sizeof(pixel);
stride_src /= sizeof(pixel);
//offset_table[]存储了32个边带中每个边带需要补偿的值
//只有4个边带是需要补偿的,其它边带补偿值为0
for (k = 0; k < 4; k++)
offset_table[(k + sao_left_class) & 31] = sao_offset_val[k + 1];
//逐个像素点处理,进行补偿
for (y = 0; y < height; y++) {
for (x = 0; x < width; x++)
dst[x] = av_clip_pixel(src[x] + offset_table[src[x] >> shift]);//根据边带的取值,加上不同的补偿值
dst += stride_dst;
src += stride_src;
}
}
从源代码中可以看出,sao_band_filter_0_8()完成了前文记录的SAO滤波中的边带补偿功能。由于源代码中已经做了比较详细的注释,在这里就不在详细叙述了。
至此有关FFmpeg HEVC解码器中的环路滤波部分的源代码就分析完毕了。
雷霄骅
[email protected]
http://blog.csdn.net/leixiaohua1020