学习opencv 习题答案-第六章
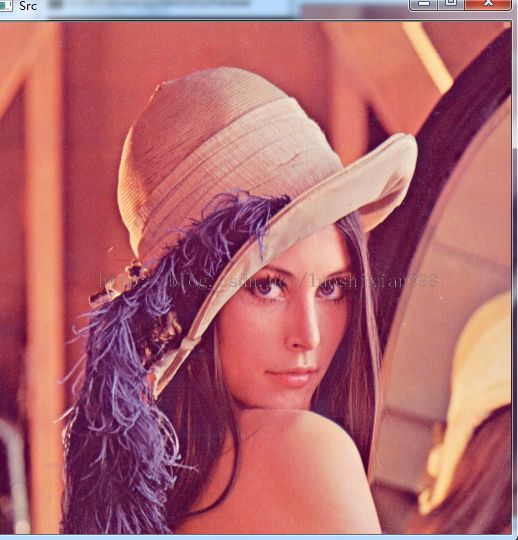
/*6_2*/
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage(argv[1]);
IplImage * image_dst = cvCloneImage(m_image);
IplImage * image_dst2 =cvCloneImage(m_image);
float m_num[9] = {0.0625,0.0625*2,0.0625,0.0625*2,0.0625*4,0.0625*2,0.0625,0.0625*2,0.0625};
CvMat m_mat =cvMat(3,3,CV_32FC1,m_num);
CvMat *m_mat1=cvCreateMat(1,3,CV_32FC1);
CvMat *m_mat2=cvCreateMat(3,1,CV_32FC1);
cvSetReal2D(m_mat1,0,0,0.25);
cvSetReal2D(m_mat1,0,1,0.5);
cvSetReal2D(m_mat1,0,2,0.25);
cvSetReal2D(m_mat2,0,0,0.25);
cvSetReal2D(m_mat2,1,0,0.5);
cvSetReal2D(m_mat2,2,0,0.25);
cvFilter2D(m_image,image_dst,&m_mat);
cvFilter2D(m_image,image_dst2,m_mat1);
cvFilter2D(image_dst2,image_dst2,m_mat2);
cvShowImage("Filter",image_dst);
cvShowImage("Src",m_image);
cvShowImage("Filter2",image_dst2);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&image_dst);
cvReleaseImage(&image_dst2);
cvReleaseMat(&m_mat1);
cvReleaseMat(&m_mat2);
cvDestroyWindow("Filter");
cvDestroyWindow("Src");
cvDestroyWindow("Filter2");
return 0;
}
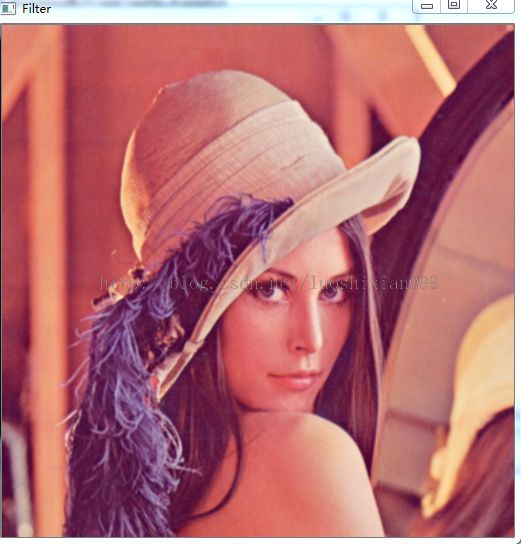
/**********效果同a的效果一样************************************/
/*****6_4**********/
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage(argv[1]);
IplImage * Sobel_3 = cvCreateImage(cvGetSize(m_image),IPL_DEPTH_8U,3);
IplImage * Sobel_5 = cvCreateImage(cvGetSize(m_image),IPL_DEPTH_8U,3);
IplImage * Sobel_7 = cvCreateImage(cvGetSize(m_image),IPL_DEPTH_8U,3);
cvSobel(m_image,Sobel_3,1,1,3);
cvSobel(m_image,Sobel_5,1,1,5);
cvSobel(m_image,Sobel_7,1,1,7);
cvShowImage("Soble_3",Sobel_3);
cvShowImage("Soble_5",Sobel_5);
cvShowImage("Soble_7",Sobel_7);
cvShowImage("Src",m_image);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&Sobel_3);
cvReleaseImage(&Sobel_5);
cvReleaseImage(&Sobel_7);
cvDestroyWindow("Soble_3");
cvDestroyWindow("Soble_5");
cvDestroyWindow("Soble_7");
cvDestroyWindow("Src");
return 0;
}
/**********************x方向的导数,会把圆的上下边界切平,y方向的导数会把圆的左右边界切平**************************/
/***************************6_5***********************************/
<pre name="code" class="cpp">#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage(argv[1],CV_LOAD_IMAGE_GRAYSCALE);
IplImage * Sobel_3_x = cvCreateImage(cvGetSize(m_image),IPL_DEPTH_32F,1);//存放x方向导数
IplImage * Sobel_3_y = cvCreateImage(cvGetSize(m_image),IPL_DEPTH_32F,1);//存放y方向导数
cvSobel(m_image,Sobel_3_x,1,0,3);
cvSobel(m_image,Sobel_3_y,0,1,3);
CvMat* m_mat = cvCreateMat(m_image->height,m_image->width,CV_32FC1); //存放幅值
cvZero(m_mat);
double val_max=0.0;
double theta =0.0;
for (int i=0; i<m_image->height; i++)
{
for(int j=0; j<m_image->width;j++)
{
double x=cvGetReal2D(Sobel_3_x,i,j);
double y=cvGetReal2D(Sobel_3_y,i,j);
double val =(double)sqrt((x)*(x)+y*y); //计算幅值并赋值
cvSetReal2D(m_mat,i,j,val);
if (val>=val_max&&val >1)
{
val_max = val;
}
}
}
for (int i=0; i<m_image->height; i++)
{
for(int j=0; j<m_image->width;j++)
{
double x=cvGetReal2D(Sobel_3_x,i,j);
double y=cvGetReal2D(Sobel_3_y,i,j);
double val =(double)sqrt((x)*(x)+y*y); //计算幅值并赋值
cvSetReal2D(m_mat,i,j,val);
if (abs(val-val_max)<100)
{
if (theta != 0.0)
{
theta=theta+180/3.14*atan2(abs(y),abs(x)); //找幅值附近的值求平均,并记录对应的角度
theta=theta/2.0;
}
else
theta=180/3.14*atan2(abs(y),abs(x));
}
}
}
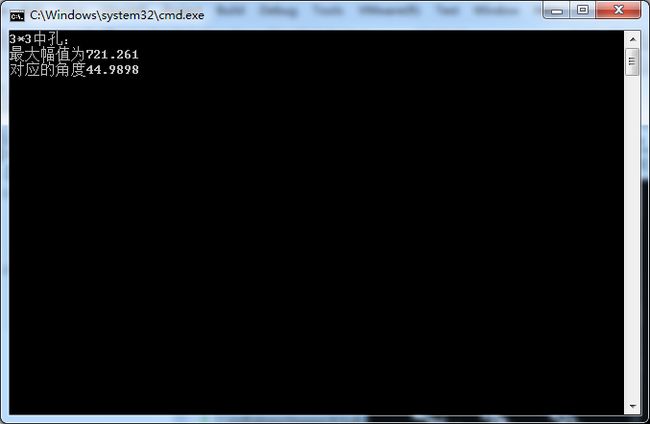
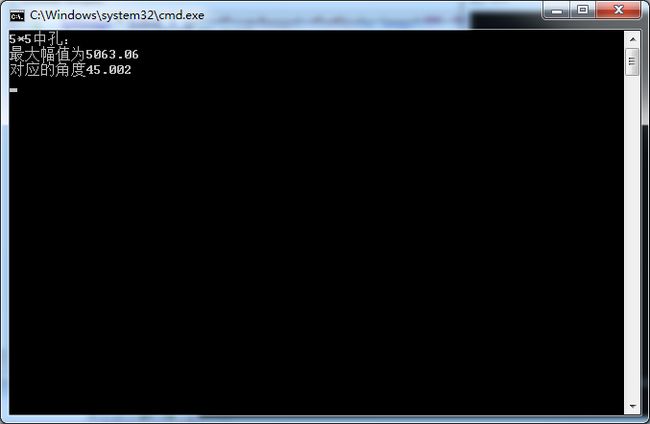
cout<<"3*3中孔:"<<endl;
cout<<"最大幅值为"<<val_max<<endl;
cout<<"对应的角度"<<theta<<endl;
cvShowImage("CMAT",m_mat);
cvShowImage("Src",m_image);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&Sobel_3_x);
cvReleaseImage(&Sobel_3_y);
cvReleaseMat(&m_mat);
cvDestroyWindow("Src");
return 0;
}
/* 6_6 */
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage(argv[1],CV_LOAD_IMAGE_GRAYSCALE);
IplImage *laplace =cvCreateImage(cvGetSize(m_image),IPL_DEPTH_32F,1);
cvLaplace(m_image,laplace,7);
cvShowImage("eye",m_image);
cvShowImage("LapLace",laplace);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&laplace);
cvDestroyWindow("eye");
cvDestroyWindow("Laplace");
return 0;
}
/* 6_7 */
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage(argv[1],CV_LOAD_IMAGE_GRAYSCALE);
IplImage *caany_3_2 =cvCreateImage(cvGetSize(m_image),IPL_DEPTH_8U,1);
IplImage *caany_11_4 =cvCreateImage(cvGetSize(m_image),IPL_DEPTH_8U,1);
IplImage *caany_4_1 =cvCreateImage(cvGetSize(m_image),IPL_DEPTH_8U,1);
cvCanny(m_image,caany_3_2,30,45);
cvCanny(m_image,caany_11_4,16,45);
cvCanny(m_image,caany_4_1 ,11,45);
cvShowImage("Canny3_2",caany_3_2);
cvShowImage("Canny11_4",caany_11_4);
cvShowImage("Canny4_1",caany_4_1);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&caany_3_2);
cvReleaseImage(&caany_11_4);
cvReleaseImage(&caany_4_1);
cvDestroyWindow("Canny3_2");
cvDestroyWindow("Canny11_4");
cvDestroyWindow("Canny4_1");
return 0;
}
</pre><pre name="code" class="cpp"><span style="font-size:24px;color:#ff0000;">7_a</span>
7_b
</pre><img src="http://img.blog.csdn.net/20141130194634882?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvbHVvc2hpeGlhbjA5OQ==/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center" alt="" /><p><span style="color:rgb(255,0,0); font-size:18px">7_c</span></p><p></p><pre name="code" class="cpp">
纵向看可以看到,边界随着高阈值的增大,噪声越来越小,但是当达到180时,边界开始失真,消除除了部分真实的边界。横向看,随着比例变小,噪声多,但是到C后,比例小,又成了优点。
/* 6_8 */
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage("bike.jpg",CV_LOAD_IMAGE_GRAYSCALE);
IplImage *image_BGR =cvCreateImage(cvGetSize(m_image),m_image->depth,3);
cvCvtColor(m_image,image_BGR,CV_GRAY2BGR);
CvMemStorage * m_storage_cirlce = cvCreateMemStorage(0);
cvSmooth(m_image,m_image); //霍夫圆变换之前做平滑处理
CvSeq * m_seq2 = cvHoughCircles(m_image,m_storage_cirlce,CV_HOUGH_GRADIENT,2,100,150,450,100,500);
for ( int i =0 ; i<m_seq2->total ; i++)
{
float* ptr =(float*) cvGetSeqElem(m_seq2,i);
CvPoint pt = cvPoint(cvRound(ptr[0]),cvRound(ptr[1]));
cvCircle(image_BGR,pt,cvRound(ptr[2]),cvScalar(0,255),3);
}
cvCanny(m_image,m_image,80,180); //霍夫直线变换之前做边缘检测
CvMemStorage * m_storage_line = cvCreateMemStorage(0);
CvSeq * m_seq = cvHoughLines2(m_image,m_storage_line,CV_HOUGH_PROBABILISTIC,1,CV_PI/180,240,100,10);
for ( int i =0 ; i<m_seq->total ; i++)
{
int * ptr =(int *) cvGetSeqElem(m_seq,i);
cvLine(image_BGR,cvPoint(ptr[0],ptr[1]),cvPoint(ptr[2],ptr[3]),cvScalar(255),3);
}
cvShowImage("Canny3_2",image_BGR);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&image_BGR);
cvReleaseMemStorage(&m_storage_cirlce);
cvReleaseMemStorage(&m_storage_line);
cvDestroyWindow("Canny3_2");
return 0;
}
/* 6_10 */
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage("lena.jpg",1);
IplImage *image_dst =cvCreateImage(cvGetSize(m_image),8,3);
IplImage *src_back =cvCreateImage(cvGetSize(m_image),8,3);
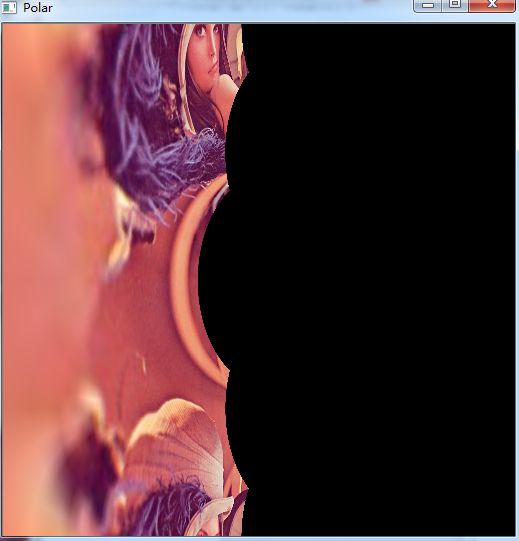
cvLogPolar(m_image,image_dst,cvPoint2D32f(m_image->width/4,m_image->height/2),40,CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS);
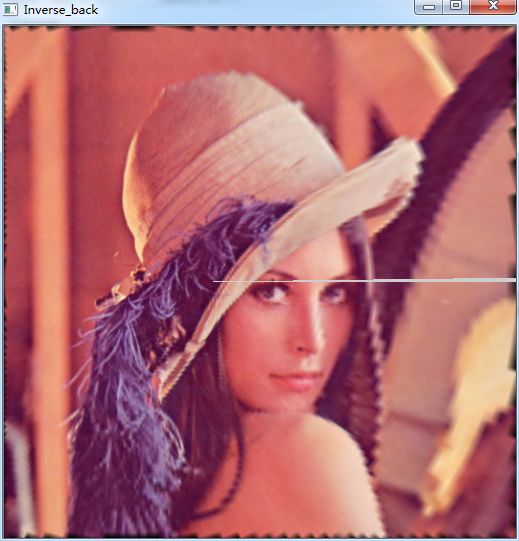
cvLogPolar(image_dst,src_back,cvPoint2D32f(m_image->width/4,m_image->height/2),40,CV_WARP_INVERSE_MAP|CV_INTER_LINEAR);
cvShowImage("Polar",image_dst);
cvShowImage("Inverse_back",src_back);
cvWaitKey(0);
cvReleaseImage(&src_back);
cvReleaseImage(&m_image);
cvReleaseImage(&image_dst);
cvDestroyWindow("Polar");
return 0;
}
/* 6_12 */
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage("compar.jpg",1);
IplImage *image_dst =cvCreateImage(cvGetSize(m_image),8,3);
IplImage *src_back =cvCreateImage(cvGetSize(m_image),8,3);
cvLogPolar(m_image,image_dst,cvPoint2D32f(m_image->width/2,m_image->height/2),40,CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS);
cvLogPolar(image_dst,src_back,cvPoint2D32f(m_image->width/2,m_image->height/2),40,CV_WARP_INVERSE_MAP|CV_INTER_LINEAR);
cvShowImage("Polar",image_dst);
cvShowImage("Inverse_back",src_back);
cvWaitKey(0);
cvReleaseImage(&src_back);
cvReleaseImage(&m_image);
cvReleaseImage(&image_dst);
cvDestroyWindow("Polar");
return 0;
}
/* 6_16 */
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage("example.jpg");
IplImage *dst =cvCloneImage(m_image);
IplImage *mag_R = cvCreateImage(cvSize(m_image->width,m_image->height),IPL_DEPTH_8U,1);
IplImage *mag_G = cvCreateImage(cvSize(m_image->width,m_image->height),IPL_DEPTH_8U,1);
IplImage *mag_B = cvCreateImage(cvSize(m_image->width,m_image->height),IPL_DEPTH_8U,1);
cvSplit(m_image,mag_B,mag_G,mag_R,NULL);
cvEqualizeHist(mag_B,mag_B);
cvEqualizeHist(mag_R,mag_R);
cvEqualizeHist(mag_G,mag_G);
cvMerge(mag_B,mag_G,mag_R,NULL,dst);
cvShowImage("Src",m_image);
cvShowImage("Dst",dst);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&mag_B);
cvReleaseImage(&mag_G);
cvReleaseImage(&mag_R);
cvReleaseImage(&dst);
cvDestroyWindow("Src");
cvDestroyWindow("Dst");
return 0;
}
/* 6_17 */
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "stdio.h"
#include <iostream>
#include "math.h"
using namespace std;
int main(int argc, char **argv)
{
IplImage * m_image = cvLoadImage("example.jpg");
IplImage *dst =cvCloneImage(m_image);
CvPoint2D32f srcQuad[4],dstQuad[4];
CvMat* matrix = cvCreateMat(3,3,CV_32FC1);
srcQuad[0].x=0;
srcQuad[0].y=0;
srcQuad[1].x=m_image->width;
srcQuad[1].y=0;
srcQuad[2].x=0;
srcQuad[2].y=m_image->height;
srcQuad[3].x=m_image->width;
srcQuad[3].y=m_image->height;
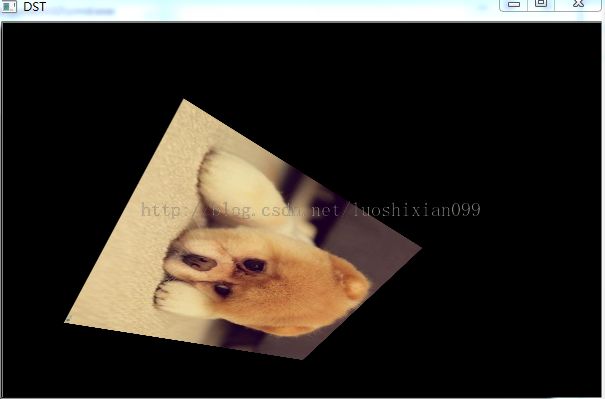
dstQuad[0].x=m_image->width*0.7;
dstQuad[0].y=m_image->height*0.6;
dstQuad[1].x=m_image->width*0.5;
dstQuad[1].y=m_image->height*0.9;
dstQuad[2].x=m_image->width*0.3;
dstQuad[2].y=m_image->height*0.2;
dstQuad[3].x=m_image->width*0.1;
dstQuad[3].y=m_image->height*0.8;
cvGetPerspectiveTransform(srcQuad,dstQuad,matrix);
cvWarpPerspective(m_image,dst,matrix);
cvShowImage("Src",m_image);
cvShowImage("DST",dst);
cvWaitKey(0);
cvReleaseImage(&m_image);
cvReleaseImage(&dst);
cvReleaseMat(&matrix);
cvDestroyWindow("Src");
cvDestroyWindow("Dst");
return 0;
}