KalmanFilter在GPS定位中的应用
Kalmanfilter是一个离散线性差分系统。系统状态前后存在一定的关系,除了状态转移(多个系统变量对下一个状态的影响),还有过程噪声和测量噪声。Kalmanfilter采用递归收敛的方式,能预测下一个系统状态或使输出的结果更可靠稳定。
Gyro陀螺仪是传感器数据的来源之一,由于它的精度与温度相关,所以应用Kalmanfilter对其进行预测和校正。这里其输出主要是校正的数据。
Gyro的状态方程为
gbias = a0 + a1 * T + a2 * T^2 + a3 * T^3
若T1=T, T2=T^2, T3=T^3.
----------以下是看别人写的代码的理解,有点蒙掉的感觉,因为没找到第一个差分量的含义,所以以下有关第一个变量的东西可能有误
gbias是Gyro的偏移量数据,则kalmanfilter的状态转移矩阵的大小为5*5,系统状态矩阵(向量)为5*1。测量矩阵为1*1
则
A =
-1 1 T1 T2 T3
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
x = (0, a0, a1, a2, a3 )T
H = (1, 1, T1, T2, T3)
拿到温度T, 及Gyro直接测量到的bias值。
时间更新,估计:
首先由温度T,计算出mbias,然后设置状态转移矩阵A。
然后进行测量更新,校正:
测量更新measurementUpdate,计算直接测量bias值与计算值mbias引起的误差协方差矩阵mMatMainCovariance和系统矩阵mMatCorrection的更新。
由新的a0, a1, a2, a3再次计算bias,得到校正的bias值。
此应用中,其中一个先验估计值bias由T计算出,使用旧的系统变量ai,然后由测量值bias,计算出最优的系统状态变量ai,并再次计算出最优的估计值。
x(0|0) = (0, A0, 0, 0, 0), A0 = bias
P(0!0) = identity(0.1, 0.1, 1e-3, 1e-6, 1e-9)
predict:
x(1|0) = A*x(0|0)
P(1|0) = AP(0|0)At + pnoise
correct:
Kg = P(1|0)/(P(1|0) + noise)
x(1|1) = x(1|0) + correctMatrix , correctMatrix = kg*error, error = measurement - x(1|0)[0]
P(1|1) = P(1|0) - Kg*H*P(1|0)
-----------------------------------------------------------
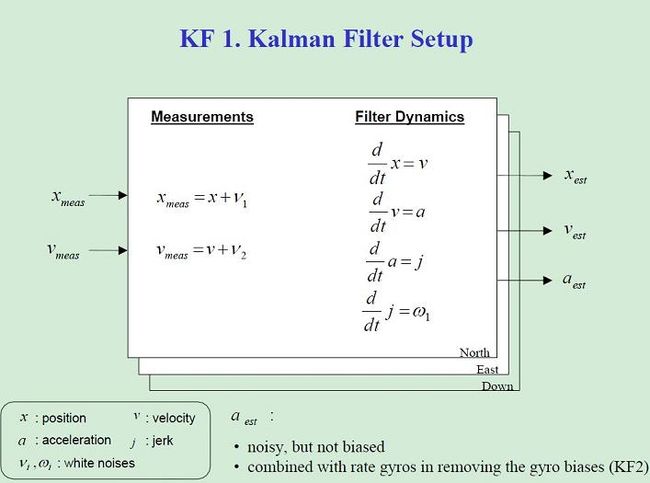
看的太累了,附上两张GPS位置和gyro bias效应的kalmanfilter的示意图
系统变量
x(t) = (x, v, a)
状态转移矩阵
A =
1, t, t^2/2
0, 1, t
0, 0, 0
测量输入变量可以有
z = (x, v)
B, 为0,H,单位矩阵,R,Q高斯随机噪声。
估计和校正x,v。
设置x(0|0),P(0|0),就可以开始Kalmanfilter的过程了。

这个陀螺仪的模型不太熟悉,以后再分析。