android Camera 架构简介
目前需要做一个语音通话及视频聊天功能开发,主要分为音频及视频两个部分,必然会涉及到Camera及AudioFlinger部分,对于显示部分又会涉及到SurfaceFlinger部分,因此需要一步步的进行学习并确认设计是否合理.
这篇文章主要针对Camera作个简要的介绍,了解需要开发的各个环节。
摄像头系统提供的功能如下几个方面:
a、预览功能preview
b、视频儿取功能 recording
c、拍照功能 takePicture
d、参数设置
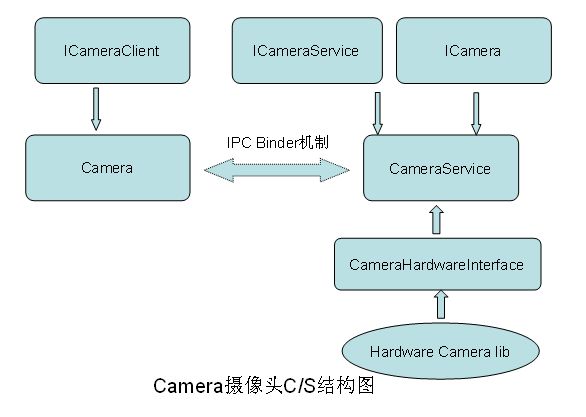
1、android中基本的架构都是C/S层架构,客户端提供调用接口,实现工作由服务端完成,那么Camera也同样
满足此条件:Client进程虽然不曾拥有任何实质的Camera数据,但是service端为它提供了丰富的接口,
它可以轻松的获得Camera数据的地址,然后处理这些数据。两者通过Binder进行通讯。
首先我们来理清其工作流程,如此才能够知道到底是个啥回事:
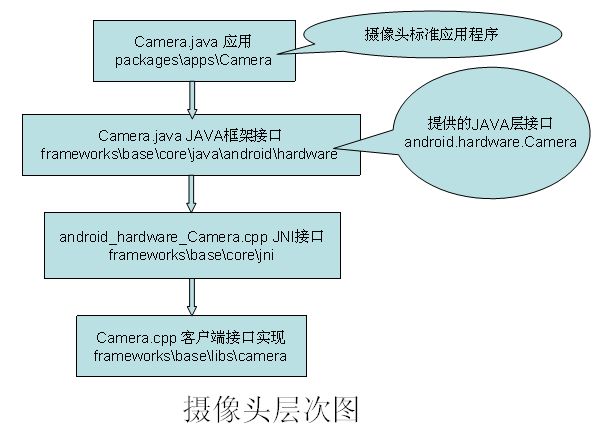
按照上图的流程,一路下来都是客户端调用与实现,而这些接口的真正实现却在服务端:
通过阅读其interface函数知道,ICamera中提供的都是控制类接口,而ICameraClient定义的都是回调函数
接口,即真正的数据流传输都是通过回调函数实现的。
ok,通过以上应该知道了基本的摄像头基本层次结构
2、重点介绍一下CamerService , 这是一个承上启下的服务进程
代码路径: frameworks\base\camera\libcameraservice
这部分内容编译生成libcameraservice库,这里有个fake的摄像头代码,由USE_CAMERA_STUB宏进行设定。
class CameraService : public BnCameraService
{
// ICameraService interface
virtual sp<ICamera> connect(const sp<ICameraClient>& cameraClient);
void removeClient(const sp<ICameraClient>& cameraClient);
//... 省略部分内容
class Client : public BnCamera
{
//... 省略部分内容
} }
运行过程中,利用CameraService::connect得于一个CameraService::Client 代码如下所示:
sp<ICamera> CameraService::connect(const sp<ICameraClient>& cameraClient)
{
...
// create a new Client object
client = new Client(this, cameraClient, callingPid);
mClient = client;
return client;
}
使用过程中,主要通过mClient这个类的接口来实现完成Camera 的功能
具体看下实现层代码:
拍照功能:
//* take a picture - image is returned in callback */
status_t CameraService::Client::takePicture()
{
LOGV("takePicture (pid %d)", getCallingPid());
Mutex::Autolock lock(mLock);
status_t result = checkPid();
if (result != NO_ERROR) return result;
if (mHardware == 0) {
LOGE("mHardware is NULL, returning.");
return INVALID_OPERATION;
}
mHardware->enableMsgType(CAMERA_MSG_SHUTTER |
CAMERA_MSG_POSTVIEW_FRAME |
CAMERA_MSG_RAW_IMAGE |
CAMERA_MSG_COMPRESSED_IMAGE);
return mHardware->takePicture();
}
这里用到了mHardware对象,调用所有的HAL层接口都是通过这个对象进行操作的,而这是如何生成的呢?
mHardware = openCameraHardware();
注意这个函数 openCameraHardware() , 这个函数位于硬件抽象层libcamera.so库中,函数定义如下:
/* factory function to instantiate a camera hardware object */
extern "C" sp<CameraHardwareInterface> openCameraHardware();
3、摄像头过程中会产生大量的数据流,这部分又是如何进行操作的呢?
未完,下一篇文章继续解读