cvMatchTemplate中的参数"result"的几点说明
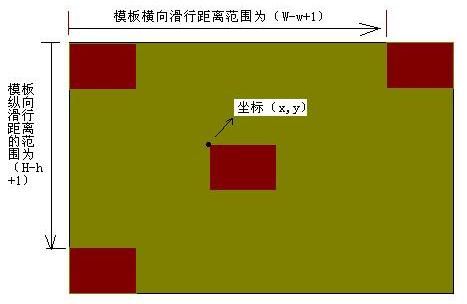
首先,参看上图。假设褐色的大图为待测图片,红色小图为模板图片。
1.result中数据的含义。
模板匹配函数cvMatchTemplate依次计算模板与待测图片的重叠区域的相似度,并将结果存入映射图像result当中,也就是说result图像中的每一个点的值代表了一次相似度比较结果。
2.result的尺寸大小。
如图可知,模板在待测图像上每次在横向或是纵向上移动一个像素,并作一次比较计算,由此,横向比较W-w+1次,纵向比较H-h+1次,从而得到一个(W-w+1)×(H-h+1)维的结果矩阵,result即是用图像来表示这样的矩阵,因而图像result的大小为(W-w+1)×(H-h+1)。
3.如何result中获得最佳匹配区域
使用函数cvMinMaxLoc(result,&min_val,&max_val,&min_loc,&max_loc,NULL);从result中提取最大值(相似度最高)以及最大值的位置(即在result中该最大值max_val的坐标位置max_loc,即模板滑行时左上角的坐标,类似于图中的坐标(x,y)。)
由此得到:rect=cvRect(max_loc.x,max_loc.y,tmp->width,tmp->height);rect表示的矩形区域即是最佳的匹配区域。
来源:http://034080116.blog.163.com/blog/static/334061912009116498997/
通过一个程序进行了测试了下,上面的说明中有个错误的地方。最佳匹配区域的矩形应该使用min_loc来决定,即:
rect=cvRect(max_loc.x,max_loc.y,tmp->width,tmp->height);
效果图如下:
模板: 要匹配的图:
要匹配的图: 匹配结果:
匹配结果:
int main() {
IplImage *src, *temp1, *ftmp;
if ((src = cvLoadImage("/home/murphy/Pictures/1.jpg", 1)) == 0) {
return -1;
}
if ((temp1 = cvLoadImage("/home/murphy/Pictures/Screenshot-3.png", 1)) == 0) {
return -1;
}
int iwidth = src->width - temp1->width + 1;
int iheight = src->height - temp1->height + 1;
ftmp = cvCreateImage(cvSize(iwidth, iheight), 32, 1);
double min_val;
double max_val;
CvPoint min_loc;
CvPoint max_loc;
cvMatchTemplate(src, temp1, ftmp, 0);
cvMinMaxLoc(ftmp, &min_val, &max_val, &min_loc, &max_loc, NULL);
cvRectangle(src, cvPoint(min_loc.x, min_loc.y), cvPoint((min_loc.x + temp1->width),(min_loc.y + temp1->height)), CV_RGB(0,255,0), 1);
cvNamedWindow("src",1);
cvShowImage("src",src);
cvWaitKey(0);
return 0;
}
昨天在另一个帖子里发现了确定矩形位置是使用的是max_loc,今天又查了下资料,原来这个跟匹配时采用的方法参数有关,具体如下:
关于参数 method:
CV_TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;最好的匹配值为0;匹配越差,匹配值越大。
CV_TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
CV_TM_CCOEFF 相关系数匹配法:1表示完美的匹配;-1表示最差的匹配。
CV_TM_SQDIFF_NORMED 归一化平方差匹配法
CV_TM_CCORR_NORMED 归一化相关匹配法
CV_TM_CCOEFF_NORMED 归一化相关系数匹配法
谢谢原作者:http://www.cnblogs.com/skyseraph/archive/2011/03/29/1998681.html