虹膜识别(三):Hough变换检测内圆边缘
前面我们已经得到了hough变换的基础条件,那就是有一个很好的用于检测的二值边缘图像如下所示:

至此我们才能运用hough变换。
Hough变换是一类广泛用于检测各种规则图形用的,像直线、圆、椭圆等等,不同的就是检测的规律不同。Hough变换的原理网上多得是,像http://blog.163.com/yuyang_tech/blog/static/21605008320130233343990/ 我当初也是百度上查的,就不详细说原理了(可能也说不明白),直接上程序了。。
function mean_circle = hough_circle(BW,step_r,step_angle,r_min,r_max,p)
%------------------------------算法概述-----------------------------
% 该算法通过a = x-r*cos(angle),b = y-r*sin(angle)将圆图像中的边缘点
% 映射到参数空间(a,b,r)中,由于是数字图像且采取极坐标,angle和r都取
% 一定的范围和步长,这样通过两重循环(angle循环和r循环)即可将原图像
% 空间的点映射到参数空间中,再在参数空间(即一个由许多小立方体组成的
% 大立方体)中寻找圆心,然后求出半径坐标。
%-------------------------------------------------------------------
%------------------------------输入参数-----------------------------
% BW:二值图像;
% step_r:检测的圆半径步长
% step_angle:角度步长,单位为弧度 :各度计算 1° = 0.0174
% 2° = 0.035
% 3° = 0.0524
% 4° = 0.0698
% 5° = 0.0872
% r_min:最小圆半径
% r_max:最大圆半径
% p:以p*hough_space的最大值为阈值,p取0,1之间的数
%-------------------------------------------------------------------
% --------对半径的大小范围规定问题--------
% ------ 实验中发现:外轮廓的半径范围在220~260之间
% 内轮廓的半径范围 60~80之间
% Note:: &&&&&&&&&&&当图像改变时半径范围需要改变&&&&&&&&&&&&
% question: 半径的范围差超过50将会显示内存不足,注意方案办法
%------------------------------输出参数-----------------------------
% hough_space:参数空间,h(a,b,r)表示圆心在(a,b)半径为r的圆上的点数
% hough_circl:二值图像,检测到的圆
% para:检测到的所有圆的圆心、半径
% mean_circle : 返回检测到的圆的平均位置及大小
%-------------------------------------------------------------------
[m,n] = size(BW); %取大小
size_r = round((r_max-r_min)/step_r)+1; %半径增加,循环次数
size_angle = round(2*pi/step_angle); %角度增加,循环次数
hough_space = zeros(m,n,size_r); %hough空间
[rows,cols] = find(BW);%把要检测的点存起来,只有白色(边缘)点需要变换
ecount = size(rows); %检测的点的个数
tic %%%% 计时开始位置
% Hough变换
% 将图像空间(x,y)对应到参数空间(a,b,r)
% a = x-r*cos(angle)
% b = y-r*sin(angle)
for i=1:ecount %点个数循环
for r=1:size_r %单个点在所有半径空间内检测
for k=1:size_angle %单个点在半径一定的所在圆内检测
a = round(rows(i)-(r_min+(r-1)*step_r)*cos(k*step_angle));
b = round(cols(i)-(r_min+(r-1)*step_r)*sin(k*step_angle));
if(a>0&a<=m&b>0&b<=n) %对应到某个圆上,记录之
hough_space(a,b,r) = hough_space(a,b,r)+1;
end
end
end
end
% 搜索超过阈值的聚集点
max_para = max(max(max(hough_space)));%找到最大值所在圆参数
index = find(hough_space>=max_para*p);%索引在一定范围内的圆参数
length = size(index);
toc %%%% 计时结束位置,通过计时观察运行效率,hough变换的一大缺点就是耗时
% 将索引结果转换为对应的行列(圆心)和半径大小
% 理解三维矩阵在内存中的存储方式可以理解公式的原理
for k=1:length
par3 = floor(index(k)/(m*n))+1;
par2 = floor((index(k)-(par3-1)*(m*n))/m)+1;%转换为圆心的y值
par1 = index(k)-(par3-1)*(m*n)-(par2-1)*m;%转换为圆心的x值
par3 = r_min+(par3-1)*step_r; %转化为圆的半径
%储存在一起
para(:,k) = [par1,par2,par3]';
end
% 为提高准确性,求取一个大致的平均位置(而不是直接采用的最大值)
mean_circle = round(mean(para')');
导入二值图后,设置一定步长参数运行,例如:mean_circle = hough_circle(J,2,0.0524,60,80,0.9);
这样就得到了内圆的参数值,运行结果如下:
运行时间:Elapsed time is 0.409292 seconds.
>> mean_circle
mean_circle =
326
331
66
可以看到圆心坐标和半径参数,在坐标中画出这个圆,编写画圆函数如下:
function plot_circle(circle_num) %------------------------------输入参数----------------------------- %给定圆的参数画出一个圆形 %圆参数 circle_num: % circle_num(1) : 圆心横坐标 % circle_num(2) :圆心纵坐标 % circle_num(3) :圆的半径 %------------------------------------------------------------------- radius_y = circle_num(1); radius_x = circle_num(2); radius = circle_num(3); alpha=0:pi/20:2*pi;%角度[0,2*pi] R=radius; %半径 %规整到图的对应位置 x=R*cos(alpha)+radius_x; y=R*sin(alpha)+radius_y; hold on,plot(x,y)
最后把圆的参数和以前的那个图画在一起如下:

画成这样应该很准了吧,基本上贴近内圆了,再把它画在原图中可以看到:
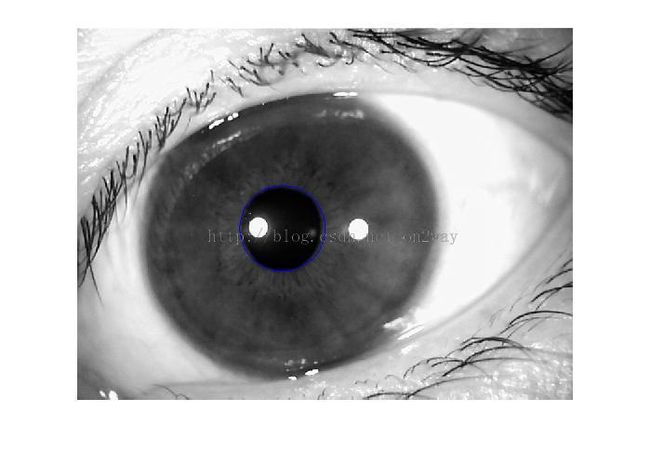
至此内圆的检测就完成了,当然其中有很多参数需要调整的,并且每一副图对应的参数不太一样,实验还需要看效果调整。