基于MTD的NANDFLASH设备驱动底层实现原理分析 一
一、MTD体系结构:Linux内核提供MTD子系统来建立FLASH针对Linux的统一、抽象接口。MTD将文件系统与底层的FLASH存储器进行隔离。
引入MTD后Linux系统中对FLASH的设备驱动分为4层

设备节点:用户在/dev目录下使用mknod命令建立MTD字符设备节点(主设备号为90),或者MTD块设备节点(主设备号为31),使用该设备节点即可访问MTD设备。
MTD设备层:基于MTD原始设备层,系统将MTD设备可以定义为MTD字符(在/mtd/mtdchar.c中实现,设备号90)和MTD块设备(在/mtd/mtdblock.c中实现,设备号31)。
MTD原始设备层:MTD原始设备层由两部分构成,一部分是MTD原始设备的通用代码,另一部分是各个特定Flash的数据,如分区。
主要构成的文件有:
drivers/mtd/mtdcore.c支持mtd字符设备
driver/mtd/mtdpart.c支持mtd块设备
Flash硬件驱动层: Flash硬件驱动层负责对Flash硬件的读、写和擦除操作。MTD设备的Nor Flash芯片驱动位于drivers/mtd/chips/子目录下,Nand Flash芯片的驱动则位于drivers/mtd/nand/子目录下。
二、Linux内核中基于MTD的NANDFLASH驱动代码布局:
三、NANDFLASH的硬件特性
要想读懂后面Linux系统中对NANDFLASH硬件驱动代码,了解NANDFLASH的硬件特性这是再好不过的。
1、NANDFLASH的内部布局

2、Nand Flash的物理存储单元的阵列组织结构(以开发板上的K9F2G08为例)

K9F2G08的大小是256M
a)block:"Block是Nand Flash的擦除操作的基本/最小单位",一片NANDFLASH(chip)由很多块
(block)组成,块的大小一般是 128KB, 256KB,512KB,此处是 128KB。。其他的小于 128KB 的,
比如 64KB称之为small block的Nand Flash。
b)page:"page是读写操作的最小单位",每一个block里面包又含了许多page(页),每个页的大小,
对于现在常见的Nand Flash多数是2KB,最新的Nand Flash的是4KB、8KB等,这类的页大小大于
2KB的NandFlash,被称作 big block的 Nand Flash,对应的发读写命令地址,一共 5个周期(cycle),
而老的 Nand Flash,页大小是 256B,512B,,这类的 Nand Flash被称作 small block的nandflash
地址周期只有4个。
c)oob:每一个页,对应还有一块区域,叫做空闲区域(spare area)/冗余区域(redundant area)而
Linux 系统中,一般叫做 OOB(Out Of Band),这个区域,是最初基于Nand Flash的硬件特
性:数据在读写时候相对容易错误,所以为了保证数据的正确性,必须要有对应的检测和纠
错机制,此机制被叫做 EDC(Error Detection Code)/ECC(Error Code Correction, 或者 Error
Checking and Correcting),所以设计了多余的区域,用于放置数据的校验值。
Oob 的读写操作,一般是随着页的操作一起完成的,即读写页的时候,对应地就读写了 oob。
关于 oob具体用途,总结起来有:
1、 标记是否是坏快
2、存储ECC数据
3、存储一些和文件系统相关的数据。如 jffs2 就会用到这些空间存储一些特定信息,
4、而yaffs2 文件系统,会在 oob中,存放很多和自己文件系统相关的信息。
3、K9F2G08的引脚定义
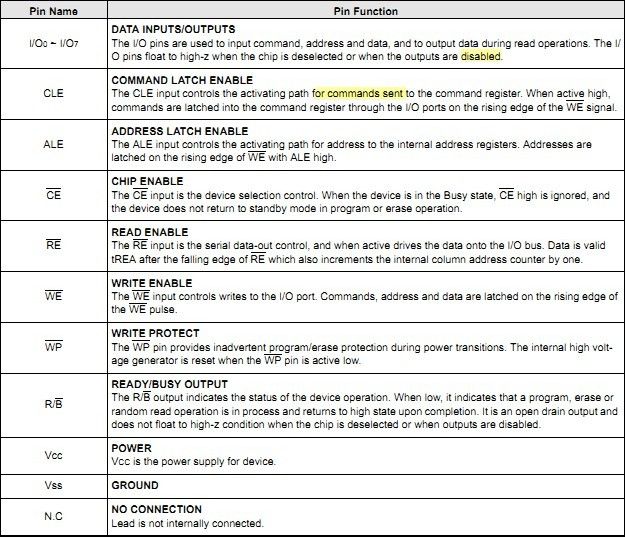
IO7~IO0:用于输入地址/数据/命令,输出数据。
CLE:命令锁存使能位,在发送命令之前要先将模式寄存器中设置CLE使能(高电平有效)。
ALE:地址锁存使能位,在发送地址之前,要先将模式寄存器中设置ALE使能(高电平有效)。
CE:(nFCE)芯片的片选信号,操作nandflash前应该拉低该位使之选中该芯片。
RE:(nFRE)读使能,低电平有效,读之前使CE有效。
WE:(nFWE)写使能,低电平有效,写之前必须使WE有效。
WP:写保护低电平有效
R/B:(R/nB)Ready/Busy Output,就绪/忙,主要用于在发送完编程/擦除命令后,检测这些操作是
否完成,忙,表示编程/擦除操作仍在进行中,就绪表示操作完成。(其中就绪:高电平,忙:低电平)。
四、常见的NANDFLASH的操作
1、要实现对 Nand Flash 的操作,比如读取一页的数据,写入一页的数据等,都要发送对应的命令,而且要符合硬件的规定,如图:
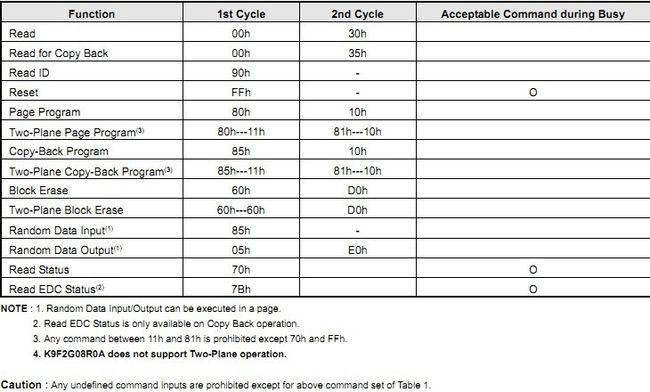
比如说要实现读一页的数据,就要发送Read命令,而且分两个周期发送,即分两次发送对应的命令,第一次是 0x00h,第二次是 0x30h,而两次命令中间,需要发送对应的你所要读取的页的地址,对应地,其他常见的一些操作,比如写一个页的数据(Page Program),就是先发送 0x80h,然后发送要写入的地址,再发送0x10h。
2、读(Read)nandflash操作过程分析

1)红色竖线穿过的第一行,是 CLE。前面介绍命令所存使能(CLE)的那个引脚将CLE 置 1,就说明你将要通过 I/O 复用端口发送进入Nand Flash的,是命令,而不是地址或者其他类型的数据。只有这样将 CLE 置 1,使其有效,才能去通知了内部硬件逻辑,你接下来将收到的是命令,内部硬件逻辑才会直到收到的是命令,放到命令寄存器中,才能实现后面正确的操作,否则,不去将 CLE 置 1使其有效硬件会无所适从,不知道你传入的到底是数据还是命令了。
2)而第二行,是 CE,那一刻的值是 0。这个道理很简单,你既然要向Nand Flash发命令,那么先要选中它,所以,要保证 CE为低电平,使其有效,也就是片选有效。
3)第三行是 WE,意思是写使能。因为接下来是往 Nand Flash里面写命令,所以,要使得 WE有效所以设为低电平。
4)第四行,是 ALE 是低电平,而 ALE 是高电平有效,此时意思就是使其无效。而对应地,前面介绍的使 CLE 有效,因为将要数据的是命令(此时是发送图示所示的读命令第二周期的 0x30) ,而不是地址。如果在其他某些场合,比如接下来的要输入地址的时候,就要使其有效,而使 CLE 无效了。
5)第五行,RE,此时是高电平,无效。可以看到,知道后面低 6 阶段,才变成低电平,才有效,因为那时候要发生读取命令,去读取数据。
6)第六行,就是我们重点要介绍的,复用的输入输出 I/O 端口了,此刻,还没有输入数据,接下来,在不同的阶段,会输入或输出不同的数据/地址。
7)第七行,R/B,高电平,表示 R(Ready)/就绪,因为到了后面的第 5阶段,硬件内部,在第四阶段,接受了外界的读取命令后,把该页的数据一点点送到页寄存器中,这段时间,属于系统在忙着干活,属于忙的阶段所以,R/B才变成低,表示 Busy忙的状态的。 其他的时序的就类似的理解。
3、计算我们要读取或者写入的行地址和例地址
以mini2440开发板上的K9F2G08为例,此Nand Flash,一共有 2048 个块,每个块内有 64 页,每个页是 2K+64 Bytes。
假设,我们要访问其中的第 1000个块中的第 25 页中的 1208字节处的地址,此时,我们就要先把具体的地址算出来:
物理地址
=块大小*块号 + 页大小*页号 + 页内地址
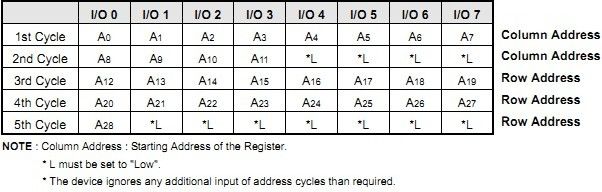
从上图可以看出,该FLASH的地址周期一共有5个,2个列地址(Column)周期,3个行地址(Row)周期
a)对应的列地址就是页内地址,该flash一个页的大小是2K即2048个字节,所以它的地址范围是0~2047,对应的上图的列地址A0-A10就是页内地址。你可能会发现多出了一个A11,从A0-A11,这样一共就有了12位,那它的地址范围就是0~2^12,即0~4096了,实际上,由于我们访问页内地址,可能会访问到 oob 的位置,即 2048-2111 这 64 个字节的范围内,所以,此处实际上只用到了 2048~2111,用于表示页内的 oob 区域,其大小是 64字节。
b)对应地,A12~A28,称作页号,页的号码,可以定位到具体是哪一个页,该FLASH一共是64页一共需要6位即A12~A17,而其中A18~A28表示对应的块号,即属于哪个块。
这里有一个很重要的地方就是我们要传入的地址的每一位,就是对应着上表中的 A0 到 A28 ,实际上上表中的 A11是比较特殊的,只有当我们访问页内地址处于 oob的位置,即属于 2048~2111 的时候,A11才会其效果,才会用 A0-A11用来表示对应的某个属于 2048~2111 的某个值,属于 oob 的某个位置,而我们此处的页内地址为 1208,还没有超过 2047 呢,所以 A11肯定是 0
然后我们再来算上面我们要访问的地址:第 1000个块中的第 25 页中的 1208字节处的地址
第 1000个块中的第 25 页中的 1208字节处的地址它对应着的页内地址为:
页内地址 =1208Bytes
=0x4B8
页 号 =块数*每块多少页 + 块内的页号
=1000*64 + 25
=0xFA19
也就是我们要访问0xFA19页内的0x4B8地址,再把这个地址转换成列和行地址
A0~A10是用来表示页内地址的所以把0x4B8拆分成两列
列地址1=0xB8,列地址2=0x04;
再把页号0xFA19拆分成3行
行地址1=0x19,行地址2=0xFA,行地址3=0x0;
对应的看看linux2.6.35/driver/mtd/nand/nand_base.c中地址的发送
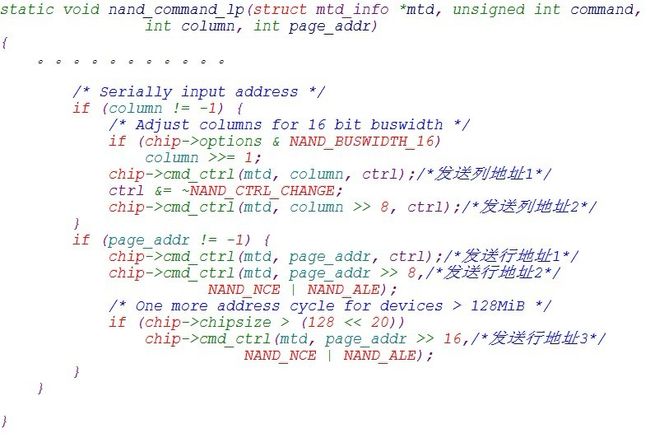
上面的column即对应着页内地址,通常情况是0,如果不是0则通过传入进来的地址除于页地址就可得到相应的列地址了。而 page_addr 即页号,就是通过要访问的地址,除于页大小,即可得到。
对于其他操作还正在研究中。。。。。。虽然说上面这些东东大部分都是来自别人的东西,但是我相信现在它已经变成我自己的东西了。。我不记得那个大帅的博客了,因为我是直接把它的博客给保存到本地了。。
非常![]() 的说:我突然发现在写这些关于NAND驱动的文章的时候,原来我一直是在改写别人的博客。。。。。其实这并不要紧的,我也觉得这不仅仅是一种比较好的学习方法了,为什么呢,因为当我在看他的博客的时候,我明白了一点,然后当我自己要写的时候。。对这个东东又进一步了解一点了。。呵呵Copy也分档次了
的说:我突然发现在写这些关于NAND驱动的文章的时候,原来我一直是在改写别人的博客。。。。。其实这并不要紧的,我也觉得这不仅仅是一种比较好的学习方法了,为什么呢,因为当我在看他的博客的时候,我明白了一点,然后当我自己要写的时候。。对这个东东又进一步了解一点了。。呵呵Copy也分档次了
五、硬件时序到软件代码的演变过程对nand_base.c部分代码的分析
该文件位于</linux2.6.35/dricer/mtd/nand/nand_base.c>
还是把那个读NAND的硬件时序图给贴上,如下图:
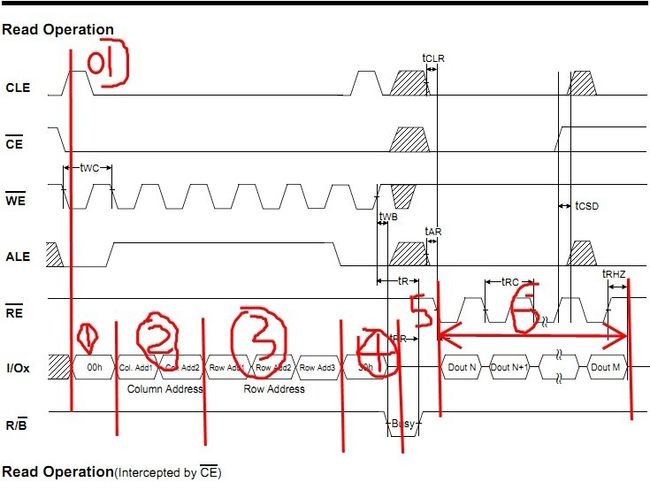
①:此阶段,是读命令第一个周期,发送的命令为0x00。
②:此阶段,依次发送列地址,关于这些行地址,列地址等是如何计算出来的,后面的内容
会有详细解释。
③:此阶段是发送对应的行地址
④:此阶段是发送读命令第二周期 2nd cycle所对应的命令,0x30
⑤:此阶段是等待时间,等待 Nand Flash硬件上准备好对应的数据,以便后续读出。
⑥:此阶段,就是一点点地把所需要的数据读出来。
MTD 读取数据的入口是 nand_read,然后调用 nand_do_read_ops,此函数主体如下:
static int nand_do_read_ops(struct mtd_info *mtd, loff_t from,
struct mtd_oob_ops *ops)
{
/***此处省略部分代码**/
。。。。。。。。。。。。。。
while(1) {
/******省略****/
.。。。。。。。。。。。。。。。
if (likely(sndcmd)) {/*#define NAND_CMD_READ0 0*/
/*1)***读取数据前肯定要先发送对应的读页命令******/
chip->cmdfunc(mtd, NAND_CMD_READ0, 0x00, page);
sndcmd = 0;
}
/* Now read the page into the buffer */
if (unlikely(ops->mode == MTD_OOB_RAW))
ret = chip->ecc.read_page_raw(mtd, chip,
bufpoi, page);
else if (!aligned && NAND_SUBPAGE_READ(chip) && !oob)
ret = chip->ecc.read_subpage(mtd, chip, col, bytes, bufpoi);
else
/******执行到这里read_page函数读取对应的数据了******/
ret = chip->ecc.read_page(mtd, chip, bufpoi,
page);
if (ret < 0)
break;
/* Transfer not aligned data */
if (!aligned) {
if (!NAND_SUBPAGE_READ(chip) && !oob)
chip->pagebuf = realpage;
memcpy(buf, chip->buffers->databuf + col, bytes);
}
buf += bytes;
。。。。。。。。。。。。。。。。。。
if (mtd->ecc_stats.failed - stats.failed)
return -EBADMSG;
return mtd->ecc_stats.corrected - stats.corrected ? -EUCLEAN : 0;
}
上面这些代码都不需要我们去实现的,使用MTD层的自定义代码就行。。。
nand_command_lp的分析
static void nand_command_lp(struct mtd_info *mtd, unsigned int command,
int column, int page_addr)
{
register struct nand_chip *chip = mtd->priv;
/* Emulate NAND_CMD_READOOB */
if (command == NAND_CMD_READOOB) {
column += mtd->writesize;
command = NAND_CMD_READ0;
}
/* Command latch cycle */
/* 此处就是就是发送读命令的第一个周期1st Cycle的命令,即0x00,对应着上述步骤中的① */
chip->cmd_ctrl(mtd, command & 0xff,
NAND_NCE | NAND_CLE | NAND_CTRL_CHANGE);
if (column != -1 || page_addr != -1) {
int ctrl = NAND_CTRL_CHANGE | NAND_NCE | NAND_ALE;
/* Serially input address */
if (column != -1) {
/* Adjust columns for 16 bit buswidth */
if (chip->options & NAND_BUSWIDTH_16)
column >>= 1;
/* 发送两个column列地址,对应着上述步骤中的② */
chip->cmd_ctrl(mtd, column, ctrl);/*发送列地址1*/
ctrl &= ~NAND_CTRL_CHANGE;
chip->cmd_ctrl(mtd, column >> 8, ctrl);/*发送列地址2*/
}
if (page_addr != -1) {
/* 接下来是发送三个Row,行地址,对应着上述步骤中的② */
chip->cmd_ctrl(mtd, page_addr, ctrl);/*发送行地址1*/
chip->cmd_ctrl(mtd, page_addr >> 8,/*发送行地址2*/
NAND_NCE | NAND_ALE);
/* One more address cycle for devices > 128MiB */
if (chip->chipsize > (128 << 20))
chip->cmd_ctrl(mtd, page_addr >> 16,/*发送行地址3*/
NAND_NCE | NAND_ALE);
}
}
chip->cmd_ctrl(mtd, NAND_CMD_NONE, NAND_NCE | NAND_CTRL_CHANGE);
/*
* program and erase have their own busy handlers
* status, sequential in, and deplete1 need no delay
*/
switch (command) {
。。。。。。。。。。。。。
return;
/***复位**/
case NAND_CMD_RESET:
if (chip->dev_ready)
break;
udelay(chip->chip_delay);
chip->cmd_ctrl(mtd, NAND_CMD_STATUS,
NAND_NCE | NAND_CLE | NAND_CTRL_CHANGE);
chip->cmd_ctrl(mtd, NAND_CMD_NONE,
NAND_NCE | NAND_CTRL_CHANGE);
while (!(chip->read_byte(mtd) & NAND_STATUS_READY)) ;
return;
/*读忙信号*/
case NAND_CMD_RNDOUT:
/* No ready / busy check necessary */
chip->cmd_ctrl(mtd, NAND_CMD_RNDOUTSTART,
NAND_NCE | NAND_CLE | NAND_CTRL_CHANGE);
chip->cmd_ctrl(mtd, NAND_CMD_NONE,
NAND_NCE | NAND_CTRL_CHANGE);
return;
/* 接下来发送读命令的第二个周期2nd Cycle的命令,即0x30,对应着上述步骤
中的④ */
case NAND_CMD_READ0:
chip->cmd_ctrl(mtd, NAND_CMD_READSTART,
NAND_NCE | NAND_CLE | NAND_CTRL_CHANGE);
chip->cmd_ctrl(mtd, NAND_CMD_NONE,
NAND_NCE | NAND_CTRL_CHANGE);
/* This applies to read commands */
default:
/*
* If we don't have access to the busy pin, we apply the given
* command delay
*/
if (!chip->dev_ready) {
udelay(chip->chip_delay);
return;
}
}
/* Apply this short delay always to ensure that we do wait tWB in
* any case on any machine. */
/* 此处是对应着④中的tWB的等待时间*/
ndelay(100);
/* 接下来就是要等待一定的时间,使得Nand Flash硬件上准备好数据,以供你之
后读取,即对应着步骤⑤ */
nand_wait_ready(mtd);
}
还有一个步骤没有实现那就是步骤⑥了一点一点的把数据读出来
nand_read_page_hwecc分析
static int nand_read_page_hwecc(struct mtd_info *mtd, struct nand_chip *chip,
uint8_t *buf, int page)
{
。。。。。。。。。。。。。。。。。。。。。。
for (i = 0; eccsteps; eccsteps--, i += eccbytes, p += eccsize) {
chip->ecc.hwctl(mtd, NAND_ECC_READ);
/**这个最重要了这才是真正的从NAND的缓冲区中把数据给读出来****/
chip->read_buf(mtd, p, eccsize);
chip->ecc.calculate(mtd, p, &ecc_calc[i]);
}
。。。。。。。。。。
return 0;
}
上面的 read_buf,就是真正的去读取数据的函数了,由于不同的Nand Flash controller 控制器所实现的方式不同,所以这个函数必须在你的 Nand Flash驱动中实现,即MTD 层,能帮我们实现的都实现了,不能实现的,那肯定是我们自己的事情了。。。接下来的工作是什么?MTD原始设备和硬件驱动层的交互了.这个才是我们要去真正实现的。。