求二部图的最小覆盖顶点
1. 最小覆盖顶点
http://www.matrix67.com/blog/archives/116
2. 代码
/* This is a free Program, You can modify or redistribute it under the terms of GNU *Description:输入一个图,能够识别该图是不是二部图,如果是,自动将此二部图的顶点划分为 红点集合蓝点集,并确保红点集中元素个数小于等于蓝点集中元素的个数, 此系统核心功能还包括找出二部图最大匹配,完备匹配,最优匹配,最小覆盖顶点集(Konig) *Language: C++ *Development Environment: VC6.0 *Author: Wangzhicheng *E-mail: [email protected] *Date: 2012/10/23 */ #include "graph.h" #include "graph.cpp" #include <string> #include <vector> #include <map> #include <stack> #include <set> using namespace std; enum Color{red,blue,black}; //定义颜色 /* 二部图类,是图的公有派生类 */ template<class ElemType> class Bipartite_Graph:public Graph<ElemType> { private: bool flag; //表示此图是不是二分图 bool isolateflag; //表示此图是否有孤立点 bool perfectMatch; //表示此图有没有完备匹配 vector<int>Red; //红点集向量 vector<int>Blue; //蓝点集向量 vector<int>unMatchBlue; //蓝点集中未匹配的点 vector<int>isolate; //孤立点集合 Color *vertexcolor; //颜色向量,向量中每个元素为相应顶点的颜色 map<int,int>match; //<蓝点,与蓝点匹配的红点> set<int>MarkedRed; //打上标记的红点集 set<int>MarkedBlue; //打上标记的蓝点集 set<int>minCoveredPoints; //最小覆盖顶点集 int count; //此二部图的匹配数 /*********************************************************/ stack<pair<int,int> >Stack; //保存着匹配 stack<pair<int,int> >tempStack; //临时保存Stack内容 vector<pair<stack<pair<int,int> >,int> >MatchArray; //存放所有匹配和其对应的权值和的向量 public: /* 二部图的构造方法,在构造方法中,完成识别二部图的功能,划分出红点集合蓝点集的功能 */ Bipartite_Graph(bool IsDirect,bool IsWeight):Graph<ElemType>(IsDirect,IsWeight) { vertexcolor=new Color[graph.vertexnum]; isolateflag=false; flag=true; perfectMatch=true; count=0; int i,j; for(i=0;i<graph.vertexnum;i++) vertexcolor[i]=black; //将所有顶点都打上黑色 for(i=0;i<graph.vertexnum;i++) visited[i]=false; //将所有顶点都设置为未访问 for(i=0;i<graph.vertexnum;i++) { if(visited[i]==false) { IsBipartite_Graph_DFS(i,red); //判断输入的图是不是二部图,如果是,则将图的顶点划分为红点集和蓝点集 if(flag==false) return; //IsBipartite_Graph_DFS执行后,如果输入的图不是二部图,则flag==false } } Exchange(); //如果需要,交换红点集合蓝点集 count=0; vector<int>::iterator it; /* 初始化时,将每个匹配设置为<蓝点,-1>,即蓝点对应的红点为-1 */ for(it=Blue.begin();it!=Blue.end();it++) { pair<int,int>p(*it,-1); // <蓝点,-1> match.insert(p); } } /* 最大匹配算法 */ void MaxMatch() { vector<int>::iterator it; if(flag==false) { cerr<<"不是二部图!"<<endl; return; } for(it=Red.begin();it!=Red.end();it++) { /* 每次到蓝点集中找增广路径之前,都将所有蓝点设为为未访问 这样才能找到最大匹配 */ for(int i=0;i<graph.vertexnum;i++) visited[i]=false; if(DFS(*it)) count++; } ElemType red,blue; cout<<"最大匹配是:"<<endl; map<int,int>::iterator pos; for(pos=match.begin();pos!=match.end();pos++) { if(pos->first==-1 || pos->second==-1) { unMatchBlue.push_back(pos->first); continue; //此时match中有顶点没有匹配 } Get(pos->first,blue); Get(pos->second,red); cout<<"红点:"<<red<<"到"<<"蓝点"<<blue<<endl; } cout<<"共有"<<count<<"个匹配"<<endl; cout<<"未匹配的蓝点是:"; for(it=unMatchBlue.begin();it!=unMatchBlue.end();it++) { cout<<*it<<" "; } cout<<endl; } /* 匈牙利算法,其核心思想是对于红点集中每一个红点,到蓝点集中找出所有的增广路径,找到就增广 从而不断扩充原有的匹配,如果红点集中每个红点都找到匹配,即其所对应的蓝点,则程序找到 完备匹配 */ void Hungary() { vector<int>::iterator it; if(isolateflag==true || flag==false) { if(flag==false) { cerr<<"不是二部图!"<<endl; return; } else { cerr<<"此二部图存在孤立点,找不到最优匹配!"<<endl; return; } } for(it=Red.begin();it!=Red.end();it++) { /* 每次到蓝点集中找增广路径之前,都将所有蓝点设为为未访问 这样才能找到完备匹配 */ for(int i=0;i<graph.vertexnum;i++) visited[i]=false; if(DFS(*it)) count++; } if(count<Red.size()) { //此时至少有一个红点没有与其匹配的蓝点 cerr<<"此二部图不存在完备匹配!"<<endl; perfectMatch=false; return; } ElemType red,blue; cout<<"完备匹配是:"<<endl; map<int,int>::iterator pos; for(pos=match.begin();pos!=match.end();pos++) { if(pos->first==-1 || pos->second==-1) continue; //此时match中有顶点没有匹配 Get(pos->first,blue); Get(pos->second,red); cout<<"红点:"<<red<<"到"<<"蓝点"<<blue<<endl; } cout<<"共有"<<count<<"个匹配"<<endl; } /* 显示二部图的红点集合蓝点集 */ void show() { Graph<ElemType>::show(); vector<int>::iterator it; cout<<endl<<"红点集是:"<<endl; for(it=Red.begin();it!=Red.end();it++) { cout<<*it<<" "; } cout<<endl; cout<<endl<<"蓝点集是:"<<endl; for(it=Blue.begin();it!=Blue.end();it++) { cout<<*it<<" "; } cout<<endl; if(isolateflag) { cout<<endl<<"孤立点是:"<<endl; for(it=isolate.begin();it!=isolate.end();it++) { cout<<*it<<" "; } } cout<<endl; } ~Bipartite_Graph() { delete []vertexcolor; } /**********************************************************************/ /* 此方法找出最优匹配,核心思想是利用枚举法,当某个红点i在蓝点集中找到匹配时, 下一个红点i+1从未访问过的蓝点中找匹配 */ void OptimalMatch() { int i,k; if(isolateflag==true || flag==false) { if(flag==false) { cerr<<"不是二部图!"<<endl; return; } else { cerr<<"此二部图存在孤立点,找不到最优匹配!"<<endl; return; } } for(i=0;i<graph.vertexnum;i++) visited[i]=false; k=0; //k表示匹配数 perfectMatch=false; vector<int>::iterator it=Red.begin(); DFS(it,k); if(perfectMatch==false) { cerr<<"该二部图不存在完备匹配!"<<endl; return; } int maxpos; int maxweight=0; for(i=0;i<MatchArray.size();i++) { if(MatchArray[i].second>maxweight) { maxweight=MatchArray[i].second; maxpos=i; } } cout<<"最优匹配是:"<<endl; stack<pair<int,int> > s=MatchArray[maxpos].first; while(s.empty()==false) { int red=s.top().first; int blue=s.top().second; cout<<"红点:"<<red<<"--"<<"蓝点:"<<blue<<endl; s.pop(); } cout<<"权值和为:"<<maxweight<<endl; } /* *最小覆盖点集 */ void MinCoveredPoints() { vector<int>::iterator it; int i; //指向蓝点 int j; //指向红点 for(it=unMatchBlue.begin();it!=unMatchBlue.end();it++) { setVisitedFalse(); i=*it; while(true) { MarkedBlue.insert(i); //将蓝点加入标记集合 visited[i]=true; j=BlueToRed(i); //找到与蓝点i相邻接且未匹配的红点 if(j==-1) break; MarkedRed.insert(j); //将红点加入标记集合 visited[j]=true; i=MatchedRed(j); //找到与红点j匹配的蓝点i } } set<int>::iterator pos; for(pos=MarkedRed.begin();pos!=MarkedRed.end();pos++) { minCoveredPoints.insert(*pos); } for(it=Blue.begin();it!=Blue.end();it++) { if(MarkedBlue.find(*it)==MarkedBlue.end()) minCoveredPoints.insert(*it); } cout<<"最小覆盖顶点是"<<endl; ElemType e; for(pos=minCoveredPoints.begin();pos!=minCoveredPoints.end();pos++) { Get(*pos,e); cout<<e<<" "; } cout<<endl; } private: void Exchange() { if(Red.size()<=Blue.size()) return; //swap(Red,Blue); //交换两个向量的内容,这样在使用匈牙利算法时可节省查找增广路径的时间 Red.swap(Blue); } /* 此方法识别输入图是不是二部图,核心思想是通过图的深度优先遍历,对每个顶点进行着色, 如果相邻接的两个顶点颜色一致,则该图不是二部图 @start: 选择一个开始的顶点进行深度优先遍历 @Color: 当前被访问顶点的颜色 */ void IsBipartite_Graph_DFS(int start,Color color) { //pre是顶点start在DFS序列中的直接前驱顶点 int j; visited[start]=true; lnode *p=graph.array[start].link; /* 找到孤立点 */ if(!p) { isolateflag=true; isolate.push_back(start); //加入孤立点集合 return; } if(vertexcolor[start]==black) { //此顶点没有打上颜色 vertexcolor[start]=color; if(color==red) { Red.push_back(start); //将此顶点加入红点集 color=blue; //将颜色转化 } else { Blue.push_back(start); color=red; } } while(p) { j=p->sequence; if(!visited[j]) { if(flag==true) IsBipartite_Graph_DFS(j,color); //去检查此顶点的相邻顶点 } else { if(vertexcolor[j]==vertexcolor[start]) { //相关联的两个顶点颜色一样,则此图不是二分图 cerr<<"不是二分图!"<<endl; Red.clear(); Blue.clear(); flag=false; return; } } p=p->next; } } /* 此方法根据红点k,在蓝点集中找到增广路径,找到就增广 @k: 红点 */ bool DFS(int k) { vector<int>::iterator it; for(it=Blue.begin();it!=Blue.end();it++) //试探每一个蓝点集的顶点 { if(graph.connect[k][*it] && !visited[*it]) //如果此蓝点与红点相连,且该蓝点没有被访问过 { visited[*it]=true; if(match[*it]==-1 || DFS(match[*it])) //如果该蓝点没有与其匹配的红点,或者蓝点 //有匹配的红点,那么从该红点查找匹配 { match[*it]=k; //找到增广路径,将其取反 return true; } } } return false; } /*********************************************************************************/ void DFS(vector<int>::iterator i,int k) { //i指向当前的红点,k表示匹配数 vector<int>::iterator it; int weight; if(i!=Red.end() && k<Red.size()) { for(it=Blue.begin();it!=Blue.end();it++) { if(graph.connect[*i][*it] && !visited[*it]) { //匹配成功 pair<int,int>p(*i,*it); //构造一个匹配 Stack.push(p); //将此匹配入栈 visited[*it]=true; DFS(i+1,k+1); //递归从第i+1个红点去找匹配 visited[*it]=false; //将递归前的访问到蓝点变成未访问 Stack.pop(); } } } if(k==Red.size()) { //所有红点都已经找到匹配 perfectMatch=true; int j; for(j=0;j<k;j++) { tempStack.push(Stack.top()); Stack.pop(); } weight=0; for(j=0;j<k;j++) { pair<int,int>p=tempStack.top(); weight+=graph.connect[p.first][p.second]; tempStack.pop(); Stack.push(p); } pair<stack<pair<int,int> >,int>p(Stack,weight); MatchArray.push_back(p); } } /* *给定红点查找与其匹配的蓝点 */ int MatchedRed(int red) { map<int,int>::iterator pos; for(pos=match.begin();pos!=match.end();pos++) { if(pos->second==red) return pos->first; } } /* *给定蓝点找与其邻接的没有被访问过且不匹配的红点 */ int BlueToRed(int Blue) { vector<int>::iterator it; for(it=Red.begin();it!=Red.end();it++) { if(graph.connect[Blue][*it] && visited[*it]==false) { return *it; } } return -1; //找不到满足条件的红点 } void setVisitedFalse() { int i; for(i=0;i<graph.vertexnum;i++) visited[i]=false; //将所有顶点都设置为未访问 } public: void test() { int blue; do{ setVisitedFalse(); cin>>blue; cout<<BlueToRed(blue); }while(blue!=-1); } }; void main() { Bipartite_Graph<string>bg(0,0); //不带权值的无向图 bg.show(); bg.MaxMatch(); bg.MinCoveredPoints(); // bg.Hungary(); //bg.OptimalMatch(); }
3. 测试
原图如下:

在程序中输入该图
输入顶点

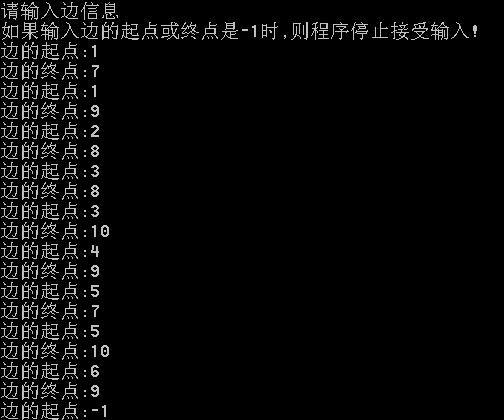
输入边
程序输出结果:
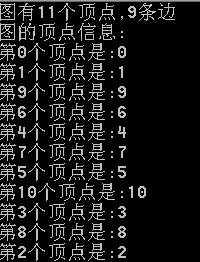
顶点输出
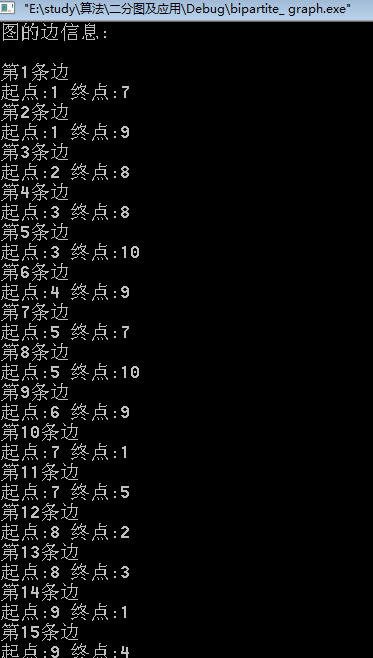
边输出

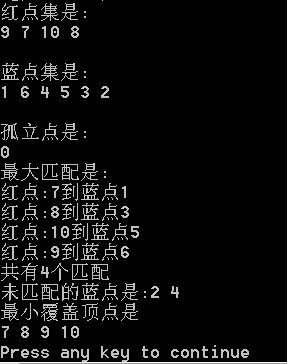
红点集,蓝点集,最大匹配,最小覆盖顶点集输出