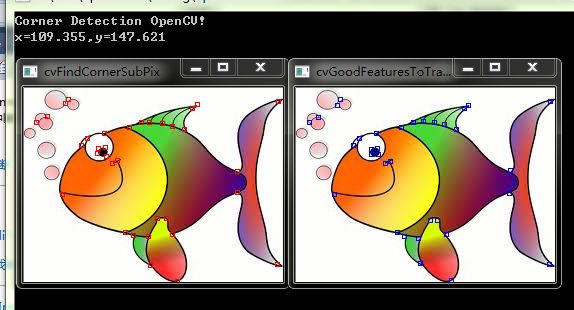
opencv 图象角点检测
Code:
#include<iostream>2
using namespace cv;
using namespace std;
#include <cv.h>
#include <math.h>
//by Huang, Haiqiao 5 Dec. 2009
int main(int argc, char** argv)
{
cout << "Corner Detection OpenCV!"<<endl;
char* filename="e://kankan//fish.jpg";
IplImage* imgRGB = cvLoadImage(filename);
IplImage* imgRGB2 = cvLoadImage(filename);
IplImage* imgGrey = cvLoadImage(filename,CV_LOAD_IMAGE_GRAYSCALE);
if (imgGrey==NULL){//image validation
cout << "No valid image input."<<endl;
char c=getchar();
return 1;
}
int w=imgGrey->width;
int h=imgGrey->height;
IplImage* eig_image = cvCreateImage(cvSize(w, h),IPL_DEPTH_32F, 1);
IplImage* temp_image = cvCreateImage(cvSize(w, h),IPL_DEPTH_32F, 1);
const int MAX_CORNERS = 140;//estimate a corner number
CvPoint2D32f corners[MAX_CORNERS] = {0};// coordinates of corners
//CvPoint2D32f* corners = new CvPoint2D32f[ MAX_CORNERS ]; //another method of declaring an array
int corner_count = MAX_CORNERS;
double quality_level = 0.1;//threshold for the eigenvalues
double min_distance = 5;//minimum distance between two corners
int eig_block_size = 3;//window size
int use_harris = false;//use 'harris method' or not
//----------initial guess by cvGoodFeaturesToTrack---------------
cvGoodFeaturesToTrack(imgGrey,
eig_image, // output
temp_image,
corners,
&corner_count,
quality_level,
min_distance,
NULL,
eig_block_size,
use_harris);
int r=2; //rectangle size
int lineWidth=1; // rectangle line width
//-----draw good feature corners on the original RGB image---------
for (int i=0;i<corner_count;i++){
cvRectangle(imgRGB2, cvPoint(corners[i].x-r,corners[i].y-r),
cvPoint(corners[i].x+r,corners[i].y+r), cvScalar(255,0,0),lineWidth);
}
int half_win_size=3;//the window size will be 3+1+3=7
int iteration=20;
double epislon=0.1;
cvFindCornerSubPix(
imgGrey,
corners,
corner_count,
cvSize(half_win_size,half_win_size),
cvSize(-1,-1),//no ignoring the neighbours of the center corner
cvTermCriteria(CV_TERMCRIT_ITER|CV_TERMCRIT_EPS,iteration,epislon)
);
//------draw subpix corners on another original RGB image------------
for (int i=0;i<corner_count;i++){
cvRectangle(imgRGB, cvPoint(corners[i].x-r,corners[i].y-r),
cvPoint(corners[i].x+r,corners[i].y+r), cvScalar(0,0,255),lineWidth);
}
//to display a coordinate of the third corner
cout<<"x="<<corners[2].x;
cout<<",y="<<corners[2].y<<endl;
cvNamedWindow("cvFindCornerSubPix", CV_WINDOW_AUTOSIZE );
cvShowImage( "cvFindCornerSubPix", imgRGB );
cvNamedWindow("cvGoodFeaturesToTrack", CV_WINDOW_AUTOSIZE );
cvShowImage( "cvGoodFeaturesToTrack", imgRGB2 );
cvWaitKey(0);
cvReleaseImage(&imgGrey);
cvReleaseImage(&imgRGB);
cvReleaseImage(&imgRGB2);
cvDestroyWindow("cvGoodFeaturesToTrack");
cvDestroyWindow("cvFindCornerSubPix");
//char c=getchar();
return 0;
}
result: