linux设备驱动--HelloWorld
linux设备驱动--HelloWorld
最近正在学习设备驱动开发,因此打算写一个系列博客,即是对自己学习的一个总结,也是对自己的一个督促,有不对,不足,需要改正的地方还望大家指出,而且希望结识志同道合的朋友一起学习技术,共同进步。
作者:liufei_learning(转载请注明出处)
email:[email protected]
IT学习交流群:160855096
开发环境:Win7(主机) + VisualBox + ubuntu10.10(虚拟机) + TQ2440开发板(2.6.30.4内核)
功能: 1.ubuntu下helloworld模块的实现
2.TQ2440下helloworld模块的实现
目录: 1.源码
源码:
/* hello.c */
#include <linux/module.h>
#include <linux/init.h>
MODULE_LICENSE("GPL");
MODULE_AUTHOR("liufei_learning");
MODULE_DESCRIPTION("Hello world module");
static int __init hello_init(void)
{
printk(KERN_NOTICE "hello world!\n");
return 0;
}
static void __exit hello_exit(void)
{
printk(KERN_NOTICE "hello exit!\n");
}
module_init(hello_init);
module_exit(hello_exit);
Makefile
ifneq ($(KERNELRELEASE),) obj-m :=hello.o else KDIR:= /lib/modules/2.6.35-22-generic/build all: make -C $(KDIR) M=$(PWD) modules clean: rm -f *.ko *.o *.mod.o *.mod.c .symvers endif
实现步骤:
ubuntu下helloworld模块的实现
1.建立hello.c Makefile文件
Makefile文件注意红色部分,2.6.35-22-generic改为本机的
ifneq($(KERNELRELEASE),)
obj-m :=hello.o
else
KDIR:= /lib/modules/2.6.35-22-generic/build
2.进入所在目录执行 make命令
3.加载模块insmod hello.ko
4.查看以安装模块 lsmod
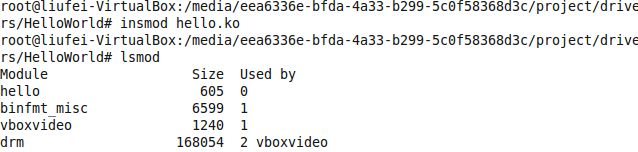
5.卸载模块rmmod
遇到的问题:
printk无法打印,这是因为printk无法再图形界面下显示在ubuntu里使用printk函数打印的信息被写到/var/log/syslog里, 使用dmesg-c 也可查看
实验结果:

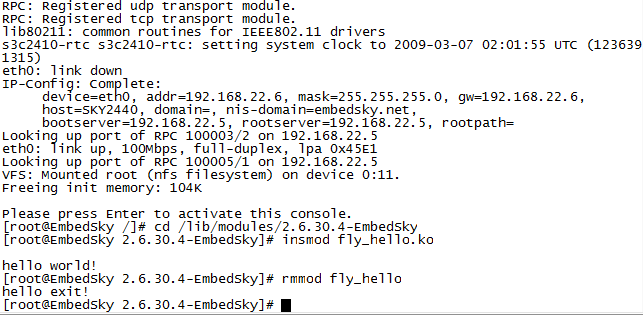
TQ2440下helloworld模块的实现
1.在内核源码 drivers/char/下建立一个 fly_hello.c文件(内容同上)
2.修改同目录下Kconfig
在menu "Character devices"后添加
config FLY_HELLO
tristate"TQ2440 Hello Driver"
dependson ARCH_S3C2440
---help---
TQ2440 Hello Driver
3.修改同目录下Makefile文件
obj-y += mem.o random.o tty_io.o n_tty.o tty_ioctl.o tty_ldisc.o tty_buffer.otty_port.o后添加
obj-$(CONFIG_FLY_HELLO) +=fly_hello.o
4.配置内核make menuconfig
DeviceDrivers--->
Character device---->
<M>TQ2440 Hello Driver
5.makeSUBDIR=drivers/char/ modules
6.复制drivers/char/下的fly_hello.ko开发板/lib/modules/2.6.30.4-EmbedSky下
7.insmod rmmod
遇到的问题:
卸载的时候出现rmmod: chdir(/lib/modules): No such file or directory错误
现在的内核模块在插入卸载时都会要转到/lib/modules/内核版本号/这个目录里。所以只要建立这个目录并且把要使用的模块.ko文件复制到这个目录就行了。
分析:
一.__init __exit
/* These macros are used to mark some functions or
7 * initialized data (doesn't apply to uninitialized data)
8 * as `initialization' functions. The kernel can take this
9 * as hint that the function is used only during the initialization
10 * phase and free up used memory resources after
11 *
12 * Usage:
13 * For functions:
14 *
15 * You should add __init immediately before the function name, like:
16 *
17 * static void __init initme(int x, int y)
18 * {
19 * extern int z; z = x * y;
20 * }
21 *
22 * If the function has a prototype somewhere, you can also add
23 * __init between closing brace of the prototype and semicolon:
24 *
25 * extern int initialize_foobar_device(int, int, int) __init;
26 *
27 * For initialized data:
28 * You should insert __initdata between the variable name and equal
29 * sign followed by value, e.g.:
30 *
31 * static int init_variable __initdata = 0;
32 * static const char linux_logo[] __initconst = { 0x32, 0x36, ... };
33 *
34 * Don't forget to initialize data not at file scope, i.e. within a function,
35 * as gcc otherwise puts the data into the bss section and not into the init
36 * section.
37 *
38 * Also note, that this data cannot be "const".
39 */
40
41/* These are for everybody (although not all archs will actually
42 discard it in modules) */
43#define __init __section(.init.text) __cold notrace
44#define __initdata __section(.init.data)
45#define __initconst __section(.init.rodata)
46#define __exitdata __section(.exit.data)
47#define __exit_call __used __section(.exitcall.exit)
这些宏被用来标记一些函数或者初始化数据(不适用于未初始化数据)作为初始化函数。此功能仅仅被用在初始化阶段,内核以此作为线索在使用后释放内存资源
用法:
static void __initinitme(int x, int y)
{
extern int z; z = x * y;
}
extern intinitialize_foobar_device(int, int, int) __init;
static intinit_variable __initdata = 0;
static const char
宏 __init的使用会在初始化完成后丢弃该函数并收回所占内存,如果该模块被编译进内核,而不是动态加载。
宏__initdata同__init 类似,只不过对变量有效。
宏__exit将忽略“清理收尾”的函数如果该模块被编译进内核。同宏 __init一样,对动态加载模块是无效的。这很容易理解。编译进内核的模块是没有清理收尾工作的,而动态加载的却需要自己完成这些工作。
这些宏在头文件linux/init.h定义,用来释放内核占用的内存。 当你在启动时看到这样的Freeingunused kernel memory: 236k freed内核输出,上面的 那些正是内核所释放的。
二.module_init()与module_exit()
258/** 259 * module_init() - driver initialization entry point 260 * @x: function to be run at kernel boot time or module insertion 261 * 262 * module_init() will either be called during do_initcalls() (if 263 * builtin) or at module insertion time (if a module). There can only 264 * be one per module. 265 */ 266#define module_init(x) __initcall(x); 267 268/** 269 * module_exit() - driver exit entry point 270 * @x: function to be run when driver is removed 271 * 272 * module_exit() will wrap the driver clean-up code 273 * with cleanup_module() when used with rmmod when 274 * the driver is a module. If the driver is statically 275 * compiled into the kernel, module_exit() has no effect. 276 * There can only be one per module. 277 */ 278#define module_exit(x) __exitcall(x);
module_init():驱动的入口点,在内核启动或动态加载模块时被调用
module_exit():驱动的结束点,动态卸载模块时被调用,如果被静态链接在内核,则module_exit()没有效果
三.MODULE_LICENSE
/* 115 * The following license idents are currently accepted as indicating free 116 * software modules 117 * 118 * "GPL" [GNU Public License v2 or later] 119 * "GPL v2" [GNU Public License v2] 120 * "GPL and additional rights" [GNU Public License v2 rights and more] 121 * "Dual BSD/GPL" [GNU Public License v2 122 * or BSD license choice] 123 * "Dual MIT/GPL" [GNU Public License v2 124 * or MIT license choice] 125 * "Dual MPL/GPL" [GNU Public License v2 126 * or Mozilla license choice] 127 * 128 * The following other idents are available 129 * 130 * "Proprietary" [Non free products] 131 * 132 * There are dual licensed components, but when running with Linux it is the 133 * GPL that is relevant so this is a non issue. Similarly LGPL linked with GPL 134 * is a GPL combined work. 135 * 136 * This exists for several reasons 137 * 1. So modinfo can show license info for users wanting to vet their setup 138 * is free 139 * 2. So the community can ignore bug reports including proprietary modules 140 * 3. So vendors can do likewise based on their own policies 141 */ 142#define MODULE_LICENSE(_license) MODULE_INFO(license, _license) 143 144/* 145 * Author(s), use "Name <email>" or just "Name", for multiple 146 * authors use multiple MODULE_AUTHOR() statements/lines. 147 */ 148#define MODULE_AUTHOR(_author) MODULE_INFO(author, _author) 149 150/* What your module does. */ 151#define MODULE_DESCRIPTION(_description) MODULE_INFO(description, _description)
宏MODULE_DESCRIPTION()用来描述模块的用途。
宏MODULE_AUTHOR()用来声明模块的作者。
宏MODULE_SUPPORTED_DEVICE() 声明模块支持的设备….
四.Makefile解析
KERNELRELEASE是在内核源码的顶层Makefile中定义的一个变量,在第一次读取执行此Makefile时,KERNELRELEASE没有被定义,所以make将读取执行else之后的内容,如果make的目标是clean,直接执行clean操作,然后结束。当make的目标为all时,-C $(KDIR)指明跳转到内核源码目录下读取那里的Makefile;M=$(PWD)表明然后返回到当前目录继续读入、执行当前的Makefile。当从内核源码目录返回时,KERNELRELEASE已被定义,kbuild也被启动去解析kbuild语法的语句,make将继续读取else之前的内容。else之前的内容为kbuild语法的语句,指明模块源码中各文件的依赖关系,以及要生成的目标模块名。
五.printk()
内核通过printk() 输出的信息具有日志级别,日志级别是通过在 printk() 输出的字符串前加一个带尖括号的整数来控制的,如printk("<6>Hello, world!/n");。内核中共提供了八种不同的日志级别,在 linux/kernel.h中有相应的宏对应。
#defineKERN_EMERG "<0>" /* systemis unusable */
#defineKERN_ALERT "<1>" /* actionmust be taken immediately */
#defineKERN_CRIT "<2>" /*critical conditions */
#defineKERN_ERR "<3>" /* error conditions */
#defineKERN_WARNING "<4>" /* warningconditions */
#defineKERN_NOTICE "<5>" /* normal butsignificant */
#defineKERN_INFO "<6>" /*informational */
#defineKERN_DEBUG "<7>" /*debug-level messages */
所以 printk()可以这样用:printk(KERN_INFO "Hello, world!/n");。
未指定日志级别的 printk()采用的默认级别是 DEFAULT_MESSAGE_LOGLEVEL,这个宏在 kernel/printk.c 中被定义为整数4,即对应KERN_WARNING。
在/proc/sys/kernel/printk 会显示4个数值(可由 echo修改),分别表示当前控制台日志级别、未明确指定日志级别的默认消息日志级别、最小(最高)允许设置的控制台日志级别、引导时默认的日志级别。当 printk()中的消息日志级别小于当前控制台日志级别时,printk 的信息(要有/n符)就会在控制台上显示。但无论当前控制台日志级别是何值,通过 /proc/kmsg(或使用dmesg)总能查看。另外如果配置好并运行了 syslogd 或 klogd,没有在控制台上显示的 printk 的信息也会追加到 /var/log/syslog 中。