用GPIO模拟SPI协议的实现
一 SPI 协议概括
SPI ,是英语Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。是Motorola 首先在其MC68HCXX 系列处理器上定义的。SPI 接口主要应用在 EEPROM ,FLASH ,实时时钟,AD 转换器,还有数字信号处理器和数字信号解码器之间。SPI ,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB 的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.
SPI 的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4 根线,事实上3 根也可以(单向传输时)。也是所有基于SPI 的设备共有的,它们是SDI (数据输入),SDO (数据输出),SCK (时钟),CS (片选)。
(1 )SDO – 主设备数据输出,从设备数据输入
(2 )SDI – 主设备数据输入,从设备数据输出
(3 )SCLK – 时钟信号,由主设备产生
(4 )CS – 从设备使能信号,由主设备控制
其中CS 是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。这就允许在同一总线上连接多个SPI 设备成为可能。
接下来就负责通讯的3 根线了。通讯是通过数据交换完成的,这里先要知道SPI 是串行通讯协议,也就是说数据是一位一位的传输的。这就是SCK 时钟线存在的原因,由SCK 提供时钟脉冲,SDI ,SDO 则基于此脉冲完成数据传输。数据输出通过SDO 线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。这样,在至少8 次时钟信号的改变(上沿和下沿为一次),就可以完成8 位数据的传输。
要注意的是,SCK 信号线只由主设备控制,从设备不能控制信号线。同样,在一个基于SPI 的设备中,至少有一个主控设备。这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8 位数据,而SPI 允许数据一位一位的传送,甚至允许暂停,因为SCK 时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。也就是说,主设备通过对SCK 时钟线的控制可以完成对通讯的控制。SPI 还是一个数据交换协议:因为SPI 的数据输入和输出线独立,所以允许同时完成数据的输入和输出。不同的SPI 设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
在点对点的通信中,SPI 接口不需要进行寻址操作,且为全双工通信,显得简单高效。在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C 系统要稍微复杂一些。
最后,SPI 接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
AT91RM9200 的SPI 接口主要由4 个引脚构成:SPICLK 、MOSI 、MISO 及 /SS ,其中SPICLK 是整个SPI 总线的公用时钟,MOSI 、MISO 作为主机,从机的输入输出的标志,MOSI 是主机的输出,从机的输入,MISO 是主机的输入,从机的输出。/SS 是从机的标志管脚,在互相通信的两个SPI 总线的器件,/SS 管脚的电平低的是从机,相反/SS 管脚的电平高的是主机。在一个SPI 通信系统中,必须有主机。SPI 总线可以配置成单主单从,单主多从,互为主从。
SPI 的片选可以扩充选择16 个外设, 这时PCS 输出=NPCS, 说NPCS0~3 接4-16 译码器, 这个译码器是需要外接4-16 译码器,译码器的输入为NPCS0~3 ,输出用于16 个外设的选择。
详细的SPI 规范可参考SPI 协议。
二 GPIO 模拟SPI 的实现
下面将结合本人项目中的经验来详细描述如何用GPIO 来模拟SPI 协议
项目中要求实现一块 LCD 为 ssd1815br1 的驱动,它与 BB 的通信使用 SPI 协议,由于 BB 上 SPI 总线已使用完, 因此考虑使用 GPIO 来模拟实现。
GPIO 对应 SPI 引脚的关系如下:
(1 )SDO – GPIO0 (BB 到LCD 的数据线)
(2 )SDI – 无, 因为暂时不需要BB 接收来自LCD 的数据
(3 )SCLK – GPIO1
(4 )CS – 接地, 使LCD 一直处于使能状态。
接下来就是要实现SPI 的协议了, SPI 有4 种传输模式:
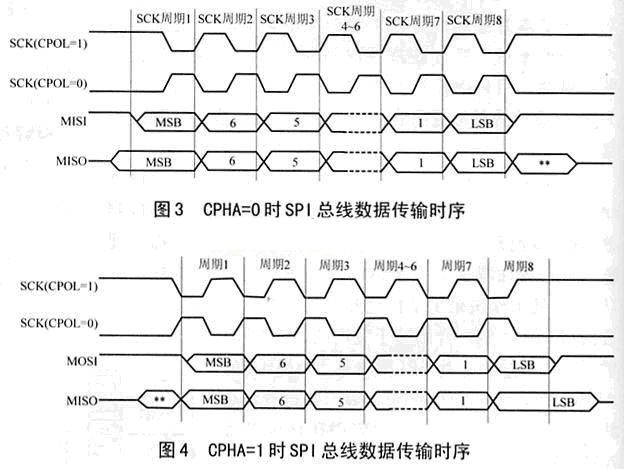
开发者可根据具体设备使用的是哪种模式来实现之, 我们项目种的这块LCD 的模式为CPOL=1, CPHA=1.
具体实现如下:
#define SPI_DATA GPIO0
#define SPI_CLK GPIO1
void spi_write(char data)
{
int8 i = 7;
uint8 mask[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
for(; i >= 0; i--) {
gpio_out(SPI_CLK, GPIO_LOW_VALUE); /* 把clock 线拉低,模拟一个时钟*/
gpio_out(SPI_DATA, ((data & mask[i]) >> i)); /* 把数据送上DATA 线*/
spi_delay(10); /* 等待适当的时间,以等待数据稳定*/
gpio_out(SPI_CLK, GPIO_HIGH_VALUE); /* 拉高clock 线,让设备端接收数据*/
spi_delay(10);
}
}
实际上模拟SPI 是很简单的事情, 只要对照SPI 传输模式的时序图来模拟就行了。需要注意的是一定要有个等待时间,以使数据在数据线上稳定下来, 并使设备端有时间取数据。刚开始调试的时候可以适当把等待时间延长一点,当调通了SPI 后在降下等待时间。
我写的等待时间如下:
#define spi_delay(delay) /
{ /
register uint32 i = 0; /
while(i < delay) { /
__asm{ /
NOP; /
NOP; /
NOP; /
NOP; /
}; /
i -= 4; /
} /
}