uCOS系统的思考
一: 世界潮流,浩浩汤汤,顺之者昌,逆之者亡---孙中山
从80X86到ARM9,再从ARM9到ARM7,平台是越做越简单,但是简单并不是意味着退步,反而是种潮流趋势。。。
在CISC道路上渐行渐远的INTEL,在移动市场无所作为,而且服务器市场也面临着ARM的潜在威胁。
废话不多说,还是直入主题:
ARM7的特性:
1:
采用RISC架构的MCU最显而易见的优点就是:
统一寻址模式,访问外设就像访问内存一样简单。而X86上则需要用特殊的IO操作指令来访问外设。
2:
差强人意的保护机制:
ARM7只提供了2中权限:
Handler Mode
Thread Mode:特权级/非特权级
一般来说,OS的代码使用特权级,APP代码使用非特权级,虽然可以保护OS代码不受非法访问。
但是没有MMU单元,APP的代码访问空间则得不到限制,线程之间可能互相破坏。所以你再也遇不到segment fault了。。转而是顷刻之间系统崩溃。。。。
事情正在起变化----毛泽东
我通读过Linux Kernel的大部分源代码,特别是关于进程调度、内存管理这部分。以为掌握了现代操作系统的设计的精髓。。。面对麻雀般的uCOS2,难免有些轻视。。。
事情并非如此简单,原因是UCOS2的进程调度策略与现代的OS有很大的区别。
时间片轮转算法:
uCOS2的调度策略并没有采用这个算法,我想大概与uCOS2是一个实时系统有关。
如果高优先级的进程不主动释放CPU,那么低优先级的进程永远也得不到运行。
Linux实现了时间片轮转,只是高优先级的进程时间片长,优先运行。好处显而易见,高优先级的如果跑飞不会导致整个系统宕掉。
char类型引发的血案:
一个BUG。。。最后查了好久才发现是char类型的问题。
因为keil编译器char类型默认被解释为unsigned char [0-255]
而GCC/VC编译器char类型默认被解释为signed char [-128, 127]
由于出现了这种代码
char a;
while(a-- >=0)
{ ....}
所以程序就再也不会退出了。。。之所以查了好久,是我理所当然的认为char会被默认解释为signed char...
之后我翻阅了C99 Doc。。。。在没有加前缀的情况下,char的具体类型由编译器决定。。。
从LINUX&GCC转入UCOS2&KEIL,一切都变了。。看来我得重新审视一下这个小系统了。
uCOS2:
uCOS2唯一值得学习的一个地方就是关于进程调度的O(1)算法:
最简单也是最愚蠢的方法是维护一个链表List。
这种方法的问题是:当一个Thread就绪时,如果根据其优先级插入List,则算法的时间复杂度为O(n)。
Linux采用了Bitmap,uCOS2也不例外。当然uCOS2的处理更简单,因为uCOS2必须在系统编译时配置好支持的Thread最大数量,用来分配Bitmap。
例如:
支持64, 则分配8字节的Bitmap,如果支持256,则分配16字节的Bitmap。
Bitmap的每一个Bit代表thread的状态,如果Bit为1则表示就绪,0则表示挂起。
以64为例:
在Bitmap中如何快速找到为1的BIT,再转换成THREAD的优先级?
如果采用扫描的方式,按位与操作不是好方法,这里涉及循环和计数。所以操作时间和THREAD数量又成O(N)了。
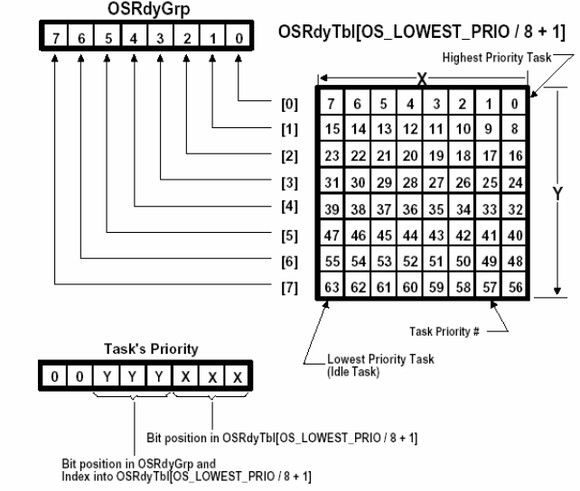
所以uCOS2采用了分组的方法:8个字节64BIT,分为8*8,如图。
用OSRdyGrp变量的BIT来指示哪个分组里有就绪的THREAD,然后在提取出来该分组,再从该分组中找到优先级最高的THREAD。
线程优先级Priority和分组的关系如图。也就是X,Y如何组成Priority。
还有一个问题:如何找到优先级最高的线程?Priority值越小,Thread优先级越高。
比如OSRdyGrp = 0x10001000,OSRdyTbl[3]=0x10001000.
很明显OSRdyGrp的BIT4和OSRdyTbl[3]的BIT4代表的Thread 27才是我们想要的。
为了解决这个问题,uCOS2又采用的了一个快速转换表OSMapTbl。
该转换表原理如下: 0x10001000 --->转换表---->3
0x00001000 --->转换表--->3
1字节8BIT,有256种BIT组合,但是组合方式返回的值是可以提前算好,存在OSMapTbl中。
比如OSRdyGrp=0x11111111和OSRdyGrp=0x00000001都应该返回0. [0代表第一个分组]
所以OSMapTbl如下:
INT8U const OSUnMapTbl[256] = {
0, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x00 to 0x0F */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x10 to 0x1F */
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x20 to 0x2F */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x30 to 0x3F */
6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x40 to 0x4F */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x50 to 0x5F */
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x60 to 0x6F */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x70 to 0x7F */
7, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x80 to 0x8F */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x90 to 0x9F */
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xA0 to 0xAF */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xB0 to 0xBF */
6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xC0 to 0xCF */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xD0 to 0xDF */
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xE0 to 0xEF */
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0 /* 0xF0 to 0xFF */
}; 可以看出OSMapTbl[0]和OSMapTbl[255]都是0。
Jean J. Labrosse,uCOS的作者,一个不懂哲学的人?
uCOS诞生于1992年,我想想,那个时候Linus在芬兰已经设计出了Linux的第一版本Beta0.12。David Cluter在西雅图为MicrioSoft第一个现代的版本操作系统内核NT忙的焦头烂额。
上个世纪90年代,OS设计已经进入了工业界,在学术界早已盖棺论定.
Labrosse在设计uCOS竟然没有采用最基本C/S模型。这也是设计OS的最基本哲学之一。
也就是Kernel为Server,App Thread为client。
App Thread 通过Kernel 提供的系统调用发出请求,具体操作由Kernel完成。
以X86平台为例,在Linux/Windows上,比如打开文件的Open函数,在libc库中的实现一定类似于:
MOV AX, XX
MOV BX, XX
MOV CX, XX
MOV DX, XX
INT 0X80
这里并不涉及文件操作的任何代码,而是APP向OS发出一个请求:我要打开FILE,请帮我打开。
1. BX、CX、DX用来保存Open的参数(FILE的路径,打开模式).
2. AX用来保存系统调用号,因为有很多系统调用,比如OPEN /WRITE/READ/CLOSE,他们各自对应一个调用号,比如OPEN对应1,WRITE对应2等等。。。
3. INT指令用来产生软中断。
软中断处理函数(exception handler),通过AX换算得到打开FILE操作的真正地址去执行。
这样的好处是:
任何线程不能直接控制硬件资源,只能提交请求,这样最大保证了系统的稳定性。
当然这个和CPU有莫大的关系,如果CPU没有提供类似于INT的软中断触发指令,和相应的保护模式,则不能实现现代OS。
作者可能受制于MOTO的芯片,才设计一个不符合惯例的OS.
OS Kernel / interrupt routine / app 采用一样的特权级。app任何微小的错误将导致整个系统崩溃。。。。
怪不得有朋友说,这类似于古老的DOS。。。
贡献两个技巧:
1 如何检验栈的使用量:
其实非常简单的操作,每次线程创建时,把栈空间全部清零。然后定期检测栈中非零的空间,就知道栈的使用量了。【只有线程运行到一定程度时,线程栈使用量才准确】
2 如何判断栈是否溢出:
在uCOS中创建任务时,在任务控制块中保存堆栈的栈底地址,并在栈底地址所对应的内存块中写入MAGIC NUMBER, 定期检查该字节是否被更改,用此来判断堆栈是否溢出。