tiny6410温度传感器详细开发步骤
首先感谢署名为lixin的网友以及署名为tandesir的CSDN博主,我必须承认我是站在巨人的肩膀上才有能力迈出了这在我看来具有重要意义的一步!
程序代码:
ds18b20.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/moduleparam.h>
#include <linux/init.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <mach/regs-gpio.h>
#include <linux/device.h>
#include <mach/hardware.h>
#include <linux/cdev.h>
#include <asm/uaccess.h>
#include <linux/errno.h>
#include "ds18b20.h"
//#define DEBUG
/* 相关引脚定义,方便以后移植 */
#define DEVICE_NAME "ds18b20"
#define DQ 8
#define CFG_IN 0
#define CFG_OUT 1
// ds18b20主次设备号(动态分配)
int ds18b20_major = 0;
int ds18b20_minor = 0;
int ds18b20_nr_devs = 1;
// 定义设备类型
static struct ds18b20_device {
struct cdev cdev;
};
struct ds18b20_device ds18b20_dev;
static struct class *ds18b20_class;
/* 函数声明 */
static int ds18b20_open(struct inode *inode, struct file *filp);
static int ds18b20_init(void);
static void write_byte(unsigned char data);
static unsigned char read_byte(void);
static ssize_t ds18b20_read(struct file *filp, char __user *buf,
size_t count, loff_t *f_pos);
void ds18b20_setup_cdev(struct ds18b20_device *dev, int index);
/*
函数名称: ds18b20_open()
函数功能: 打开设备,初始化ds18b20
入口参数: inode:设备文件信息; filp: 被打开的文件的信息
出口参数: 成功时返回0,失败返回-1
*/
static int ds18b20_open(struct inode *inode, struct file *filp)
{
int flag = 0;
/*struct ds18b20_device *dev;
dev = container_of(inode->i_cdev, struct ds18b20_device, cdev);
filp->private_data = dev;*/
flag = ds18b20_init();
if(flag & 0x01)
{
#ifdef DEBUG
printk(KERN_WARNING "open ds18b20 failed\n");
#endif
return -1;
}
#ifdef DEBUG
printk(KERN_NOTICE "open ds18b20 successful\n");
#endif
return 0;
}
/*
函数名称: ds18b20_init()
函数功能: 复位ds18b20
入口参数: 无
出口参数: retval:成功返回0,失败返回1
备 注: 操作时序见ds18b20 datasheet
*/
static int ds18b20_init(void)
{
int retval = 0;
s3c6410_gpio_cfgpin(DQ, CFG_OUT);
s3c6410_gpio_pullup(DQ, 0);
s3c6410_gpio_setpin(DQ, 1);
udelay(2);
s3c6410_gpio_setpin(DQ, 0); // 拉低ds18b20总线,复位ds18b20
udelay(500); // 保持复位电平500us
s3c6410_gpio_setpin(DQ, 1); // 释放ds18b20总线
udelay(60);
// 若复位成功,ds18b20发出存在脉冲(低电平,持续60~240us)
s3c6410_gpio_cfgpin(DQ, CFG_IN);
retval = s3c6410_gpio_getpin(DQ);
udelay(500);
s3c6410_gpio_cfgpin(DQ, CFG_OUT);
s3c6410_gpio_pullup(DQ, 0);
s3c6410_gpio_setpin(DQ, 1); // 释放总线
return retval;
}
/*
函数名称: write_byte()
函数功能: 向18b20写入一个字节数据
入口参数: data
出口参数: 无
*/
static void write_byte(unsigned char data)
{
int i = 0;
s3c6410_gpio_cfgpin(DQ, CFG_OUT);
s3c6410_gpio_pullup(DQ, 1);
for (i = 0; i < 8; i ++)
{
// 总线从高拉至低电平时,就产生写时隙
s3c6410_gpio_setpin(DQ, 1);
udelay(2);
s3c6410_gpio_setpin(DQ, 0);
s3c6410_gpio_setpin(DQ, data & 0x01);
udelay(60);
data >>= 1;
}
s3c6410_gpio_setpin(DQ, 1); // 重新释放ds18b20总线
}
/*
函数名称: read_byte()
函数功能: 从ds18b20读出一个字节数据
入口参数: 无
出口参数: 读出的数据
*/
static unsigned char read_byte(void)
{
int i;
unsigned char data = 0;
for (i = 0; i < 8; i++)
{
// 总线从高拉至低,只需维持低电平17ts,再把总线拉高,就产生读时隙
s3c6410_gpio_cfgpin(DQ, CFG_OUT);
s3c6410_gpio_pullup(DQ, 0);
s3c6410_gpio_setpin(DQ, 1);
udelay(2);
s3c6410_gpio_setpin(DQ, 0);
udelay(2);
s3c6410_gpio_setpin(DQ, 1);
udelay(8);
data >>= 1;
s3c6410_gpio_cfgpin(DQ, CFG_IN);
if (s3c6410_gpio_getpin(DQ))
data |= 0x80;
udelay(50);
}
s3c6410_gpio_cfgpin(DQ, CFG_OUT);
s3c6410_gpio_pullup(DQ, 0);
s3c6410_gpio_setpin(DQ, 1); // 释放ds18b20总线
return data;
}
/*
函数名称: ds18b20_read()
函数功能: 读出18b20的温度
*/
static ssize_t ds18b20_read(struct file *filp, char __user *buf,
size_t count, loff_t *f_pos)
{
int flag;
unsigned long err;
unsigned char result[2] = {0x00, 0x00};
//struct ds18b20_device *dev = filp->private_data;
flag = ds18b20_init();
if (flag)
{
#ifdef DEBUG
printk(KERN_WARNING "ds18b20 init failed\n");
#endif
return -1;
}
write_byte(0xcc);
write_byte(0x44);
flag = ds18b20_init();
if (flag)
return -1;
write_byte(0xcc);
write_byte(0xbe);
result[0] = read_byte(); // 温度低八位
result[1] = read_byte(); // 温度高八位
err = copy_to_user(buf, &result, sizeof(result));
return err ? -EFAULT : min(sizeof(result),count);
}
/*
字符驱动程序的核心,应用程序所调用的open,read等函数最终会
调用这个结构中的对应函数
*/
static struct file_operations ds18b20_dev_fops = {
.owner = THIS_MODULE,
.open = ds18b20_open,
.read = ds18b20_read,
};
/*
函数名称: ds18b20_setup_cdev()
函数功能: 初始化cdev
入口参数: dev:设备结构体; index:
*/
void ds18b20_setup_cdev(struct ds18b20_device *dev, int index)
{
int err, devno = MKDEV(ds18b20_major, ds18b20_minor + index);
cdev_init(&dev->cdev, &ds18b20_dev_fops);
dev->cdev.owner = THIS_MODULE;
err = cdev_add(&(dev->cdev), devno, 1);
if (err)
{
#ifdef DEBUG
printk(KERN_NOTICE "ERROR %d add ds18b20\n", err);
#endif
}
}
/*
函数名称: ds18b20_dev_init()
函数功能: 为温度传感器分配注册设备号,初始化cdev
入口参数: 无
出口参数: 若成功执行,返回0
*/
static int __init ds18b20_dev_init(void)
{
ds18b20_major = register_chrdev(ds18b20_major, DEVICE_NAME, &ds18b20_dev_fops);
if (ds18b20_major<0)
{
printk(DEVICE_NAME " Can't register major number!\n");
return -EIO;
}
ds18b20_class = class_create(THIS_MODULE, DEVICE_NAME);
device_create(ds18b20_class, NULL, MKDEV(ds18b20_major, ds18b20_minor), NULL, DEVICE_NAME);
#ifdef DEBUG
printk(KERN_WARNING "register ds18b20 driver successful!\n");
#endif
return 0;
}
/*函数名称: ds18b20_dev_exit()
函数功能: 注销设备*/
static void __exit ds18b20_dev_exit(void)
{
device_destroy(ds18b20_class, MKDEV(ds18b20_major,ds18b20_minor));
class_unregister(ds18b20_class);
class_destroy(ds18b20_class);
unregister_chrdev(ds18b20_major, DEVICE_NAME);
#ifdef DEBUG
printk(KERN_WARNING "Exit ds18b20 driver!\n");
#endif
}
module_init(ds18b20_dev_init);
module_exit(ds18b20_dev_exit);
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("[email protected]");
ds18b20.h
#ifndef __DS18B20_H__
#define __DS18B20_H__
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/interrupt.h>
#include <linux/ioport.h>
#include <linux/gpio.h>
#include <linux/io.h>
#include <mach/hardware.h>
#include <mach/map.h>
#include <mach/regs-gpio.h>
#include <mach/gpio-bank-n.h>
#include <mach/regs-clock.h>
#include <asm/irq.h>
#include <plat/gpio-core.h>
#include <plat/gpio-cfg.h>
void s3c6410_gpio_cfgpin(unsigned int pin, unsigned int function)
{
//s3c_gpio_cfgpin(pin,function);
unsigned int tmp;
tmp = readl(S3C64XX_GPNCON);
tmp = (tmp & ~(3<<pin*2))|(function<<pin*2);
writel(tmp, S3C64XX_GPNCON);
}
void s3c6410_gpio_pullup(unsigned int pin, unsigned int to)
{
//s3c_gpio_setpull(pin,to);
unsigned int tmp;
tmp = readl(S3C64XX_GPNPUD);
tmp = (tmp & ~(3<<pin*2))|(to<<pin*2);
writel(tmp, S3C64XX_GPNPUD);
}
unsigned int s3c6410_gpio_getpin(unsigned int pin)
{
unsigned int tmp;
tmp = readl(S3C64XX_GPNDAT);
tmp = tmp & (1 << (pin));
return tmp;
}
void s3c6410_gpio_setpin(unsigned int pin, unsigned int dat)
{
unsigned int tmp;
tmp = readl(S3C64XX_GPNDAT);
tmp &= ~(1 << (pin));
tmp |= ( (dat) << (pin) );
writel(tmp, S3C64XX_GPNDAT); ;
}
#endif
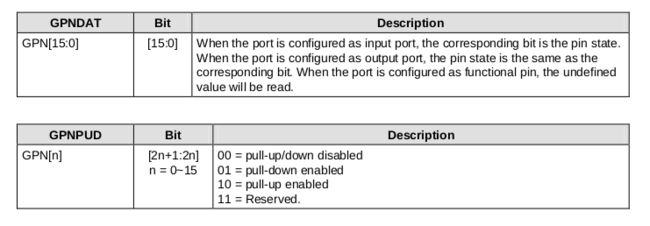
寄存器所实现的具体的功能如下图:
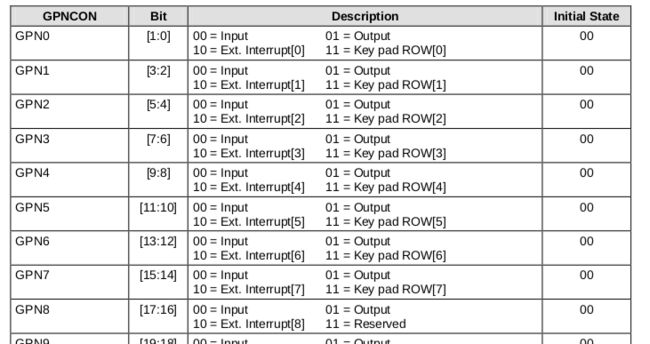
温度传感器使用的是GPN8
测试程序:
test.c
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <linux/ioctl.h>
// 函数声明
void ds18b20_delay(int i);
int main()
{
int fd, i;
unsigned char result[2]; // 从ds18b20读出的结果,result[0]存放低八位
unsigned char integer_value = 0;
float temperature, decimal_value; // 温度数值,decimal_value为小数部分的值
fd = open("/dev/ds18b20", 0);
if (fd < 0)
{
perror("open device failed\n");
exit(1);
}
while (1)
{
i++;
read(fd, &result, sizeof(result));
integer_value = ((result[0] & 0xf0) >> 4) | ((result[1] & 0x07) << 4);
// 精确到0.25度
decimal_value = 0.5 * ((result[0] & 0x0f) >> 3) + 0.25 * ((result[0] & 0x07) >> 2);
temperature = (float)integer_value + decimal_value;
printf("The temperature is %6.2f\n",temperature);
if (i % 20 == 0)
printf("\n");
ds18b20_delay(50);
}
}
/* 函数名称: ds18b20_delay() */
void ds18b20_delay(int i)
{
int j, k;
for (j = 0; j < i; j++)
for(k = 0; k < 50000; k++);
}
因为我的内核版本与配置还有路径与tandesir网友的不一样,所以没有借用他Makefile文件,下面我将详细介绍一下具体的实现过程:
首先编辑配置文件Kconfig:
我的linux-2.6.38内核放在“/home/zjp/文档”这个目录下面,所以直接进入/home/zjp/文档/linux-2.6.38/drivers/char,然后编辑Kconfig文件:#vim Kconfig。在这个文件里面加入:
config MINI6410_DS18B20
tristate "ds18b20 drives"
depends on CPU_S3C6410
保存退出。
如图:
这个时候返回到/linux-2.6.38目录,运行“#make menuconfig”就会返回一个界面,在Device Drivers -->Character devices菜单下面就可以看见“<M> ds18b20 drives”这个选项。
如图:
之后再进入linux-2.6.38/drivers/char,编辑Makefile文件,在其中加入“obj-$(CONFIG_MINI6410_DS18B20) +=ds18b20.o“这一项。
如图:

最后一步就是生成*.ko文件了:
返回到/linux-2.6.38目录下面,执行“#make modules”就会在/linux-2.6.38/drivers/char目录里面生成你所需要的*.ko文件。
下一步加载到开发板的内核树里:
使用U盘或者SD卡或者直接ftp传输ds18b20.ko到开发板里,然后“#insmod ds18b20.ko“进去就可以了,这里我尝试了很长时间也不知道为什么modprobe命令不能加载这个文件,最后还是使用的insmod。
最后$arm-linux-gcc test.c -o test ,然后你是怎么样把*.ko文件弄到开发板上就怎么把test文件弄到开发板上,最最后“./test”直接就可以运行了!