win32多线程编程
一.深入浅出Win32多线程程序设计之基本概念[转]
引言
从单进程单线程到多进程多线程是操作系统发展的一种必然趋势,当年的DOS系统属于单任务操作系统,最优秀的程序员也只能通过驻留内存的方式实现所谓的" 多任务",而如今的Win32操作系统却可以一边听音乐,一边编程,一边打印文档。
理解多线程及其同步、互斥等通信方式是理解现代操作系统的关键一环,当我们精通了Win32多线程程序设计后,理解和学习其它操作系统的多任务控制也非常容易。许多程序员从来没有学习过嵌入式系统领域著名的操作系统VxWorks,但是立马就能在上面做开发,大概要归功于平时在Win32多线程上下的功夫。
因此,学习Win32多线程不仅对理解Win32本身有重要意义,而且对学习和领会其它操作系统也有触类旁通的作用。
进程与线程
先阐述一下进程和线程的概念和区别,这是一个许多大学老师也讲不清楚的问题。
进程(Process)是具有一定独立功能的程序关于某个数据集合上的一次运行活动,是系统进行资源分配和调度的一个独立单位。程序只是一组指令的有序集合,它本身没有任何运行的含义,只是一个静态实体。而进程则不同,它是程序在某个数据集上的执行,是一个动态实体。它因创建而产生,因调度而运行,因等待资源或事件而被处于等待状态,因完成任务而被撤消,反映了一个程序在一定的数据集上运行的全部动态过程。
线程(Thread)是进程的一个实体,是CPU调度和分派的基本单位。线程不能够独立执行,必须依存在应用程序中,由应用程序提供多个线程执行控制。
线程和进程的关系是:线程是属于进程的,线程运行在进程空间内,同一进程所产生的线程共享同一内存空间,当进程退出时该进程所产生的线程都会被强制退出并清除。线程可与属于同一进程的其它线程共享进程所拥有的全部资源,但是其本身基本上不拥有系统资源,只拥有一点在运行中必不可少的信息(如程序计数器、一组寄存器和栈)。
根据进程与线程的设置,操作系统大致分为如下类型:
(1)单进程、单线程,MS-DOS大致是这种操作系统;
(2)多进程、单线程,多数UNIX(及类UNIX的LINUX)是这种操作系统;
(3)多进程、多线程,Win32(Windows NT/2000/XP等)、Solaris 2.x和OS/2都是这种操作系统;
(4)单进程、多线程,VxWorks是这种操作系统。
在操作系统中引入线程带来的主要好处是:
(1)在进程内创建、终止线程比创建、终止进程要快;
(2)同一进程内的线程间切换比进程间的切换要快,尤其是用户级线程间的切换。另外,线程的出现还因为以下几个原因:
(1)并发程序的并发执行,在多处理环境下更为有效。一个并发程序可以建立一个进程,而这个并发程序中的若干并发程序段就可以分别建立若干线程,使这些线程在不同的处理机上执行。
(2)每个进程具有独立的地址空间,而该进程内的所有线程共享该地址空间。这样可以解决父子进程模型中,子进程必须复制父进程地址空间的问题。
(3)线程对解决客户/服务器模型非常有效。
Win32进程
1、进程间通信( IPC)
Win32进程间通信的方式主要有:
(1)剪贴板(Clip Board);
(2)动态数据交换(Dynamic Data Exchange);
(3)部件对象模型(Component Object Model);
(4)文件映射(File Mapping);
(5)邮件槽(Mail Slots);
(6)管道(Pipes);
(7)Win32套接字( Socket);
(8)远程过程调用(Remote Procedure Call);
(9)WM_COPYDATA消息(WM_COPYDATA Message)。
2、获取进程信息
在WIN32中,可使用在PSAPI .DLL中提供的Process status Helper函数帮助我们获取进程信息。
(1)EnumProcesses()函数可以获取进程的ID,其原型为:
参数lpidProcess:一个足够大的DWORD类型的数组,用于存放进程的ID值;
参数cb:存放进程ID值的数组的最大长度,是一个DWORD类型的数据;
参数cbNeeded:指向一个DWORD类型数据的指针,用于返回进程的数目;
函数返回值:如果调用成功,返回TRUE,同时将所有进程的ID值存放在lpidProcess参数所指向的数组中,进程个数存放在cbNeeded参数所指向的变量中;如果调用失败,返回FALSE。
(2)GetModuleFileNameExA()函数可以实现通过进程句柄获取进程文件名,其原型为:
参数hProcess:接受进程句柄的参数,是HANDLE类型的变量;
参数hModule:指针型参数,在本文的程序中取值为NULL;
参数lpstrFileName:LPTSTR类型的指针,用于接受主调函数传递来的用于存放进程名的字符数组指针;
参数nsize:lpstrFileName所指数组的长度;
函数返回值:如果调用成功,返回一个大于0的DWORD类型的数据,同时将hProcess所对应的进程名存放在lpstrFileName参数所指向的数组中;加果调用失败,则返回0。
通过下列代码就可以遍历系统中的进程,获得进程列表:
Win32线程
WIN32靠线程的优先级(达到抢占式多任务的目的)及分配给线程的CPU时间来调度线程。WIN32本身的许多应用程序也利用了多线程的特性,如任务管理器等。
本质而言,一个处理器同一时刻只能执行一个线程("微观串行")。WIN32多任务机制使得CPU好像在同时处理多个任务一样,实现了"宏观并行"。其多线程调度的机制为:
(1)运行一个线程,直到被中断或线程必须等待到某个资源可用;
(2)保存当前执行线程的描述表(上下文);
(3)装入下一执行线程的描述表(上下文);
(4)若存在等待被执行的线程,则重复上述过程。
WIN32下的线程可能具有不同的优先级,优先级的范围为0~31,共32级,其中31表示最高优先级,优先级0为系统保留。它们可以分成两类,即实时优先级和可变优先级:
(1)实时优先级从16到31,是实时程序所用的高优先级线程,如许多监控类应用程序;
(2)可变优先级从1到15,绝大多数程序的优先级都在这个范围内。。WIN32调度器为了优化系统响应时间,在它们执行过程中可动态调整它们的优先级。
多线程确实给应用开发带来了许多好处,但并非任何情况下都要使用多线程,一定要根据应用程序的具体情况来综合考虑。一般来说,在以下情况下可以考虑使用多线程:
(1)应用程序中的各任务相对独立;
(2)某些任务耗时较多;
(3)各任务需要有不同的优先级。
另外,对于一些实时系统应用,应考虑多线程。
Win32核心对象
WIN32核心对象包括进程、线程、文件、事件、信号量、互斥体和管道,核心对象可能有不只一个拥有者,甚至可以跨进程。有一组WIN32 API与核心对象息息相关:
(1)WaitForSingleObject,用于等待对象的"激活",其函数原型为:
可以作为WaitForSingleObject第一个参数的对象包括:Change notification、Console input、Event、Job、Memory resource notification、Mutex、Process、Semaphore、Thread和Waitable timer。
如果等待的对象不可用,那么线程就会挂起,直到对象可用线程才会被唤醒。对不同的对象,WaitForSingleObject表现为不同的含义。例如,使用 WaitForSingleObject(hThread,…)可以判断一个线程是否结束;使用WaitForSingleObject (hMutex,…)可以判断是否能够进入临界区;而WaitForSingleObject (hProcess,… )则表现为等待一个进程的结束。
与WaitForSingleObject对应还有一个WaitForMultipleObjects函数,可以用于等待多个对象,其原型为:
(2)CloseHandle,用于关闭对象,其函数原型为:
如果函数执行成功,则返回TRUE;否则返回FALSE,我们可以通过GetLastError函数进一步可以获得错误原因。
C运行时库
在VC++6.0中,有两种多线程编程方法:一是使用C运行时库及WIN32 API函数,另一种方法是使用MFC,MFC对多线程开发有强大的支持。
标准C运行时库是1970年问世的,当时还没有多线程的概念。因此,C运行时库早期的设计者们不可能考虑到让其支持多线程应用程序。
Visual C++提供了两种版本的C运行时库,-个版本供单线程应用程序调用,另一个版本供多线程应用程序调用。多线程运行时库与单线程运行时库有两个重大差别:
(1)类似errno的全局变量,每个线程单独设置一个;
这样从每个线程中可以获取正确的错误信息。
(2)多线程库中的数据结构以同步机制加以保护。
这样可以避免访问时候的冲突。
Visual C++提供的多线程运行时库又分为静态链接库和动态链接库两类,而每一类运行时库又可再分为debug版和release版,因此Visual C++共提供了6个运行时库。如下表:
如果不使用VC多线程C运行时库来生成多线程程序,必须执行下列操作:
(1)使用标准 C 库(基于单线程)并且只允许可重入函数集进行库调用;
(2)使用 Win32 API 线程管理函数,如 CreateThread;
(3)通过使用 Win32 服务(如信号量和 EnterCriticalSection 及 LeaveCriticalSection 函数),为不可重入的函数提供自己的同步。
如果使用标准 C 库而调用VC运行时库函数,则在程序的link阶段会提示如下错误:
二.深入浅出Win32多线程程序设计之线程控制
从单进程单线程到多进程多线程是操作系统发展的一种必然趋势,当年的DOS系统属于单任务操作系统,最优秀的程序员也只能通过驻留内存的方式实现所谓的" 多任务",而如今的Win32操作系统却可以一边听音乐,一边编程,一边打印文档。
理解多线程及其同步、互斥等通信方式是理解现代操作系统的关键一环,当我们精通了Win32多线程程序设计后,理解和学习其它操作系统的多任务控制也非常容易。许多程序员从来没有学习过嵌入式系统领域著名的操作系统VxWorks,但是立马就能在上面做开发,大概要归功于平时在Win32多线程上下的功夫。
因此,学习Win32多线程不仅对理解Win32本身有重要意义,而且对学习和领会其它操作系统也有触类旁通的作用。
进程与线程
先阐述一下进程和线程的概念和区别,这是一个许多大学老师也讲不清楚的问题。
进程(Process)是具有一定独立功能的程序关于某个数据集合上的一次运行活动,是系统进行资源分配和调度的一个独立单位。程序只是一组指令的有序集合,它本身没有任何运行的含义,只是一个静态实体。而进程则不同,它是程序在某个数据集上的执行,是一个动态实体。它因创建而产生,因调度而运行,因等待资源或事件而被处于等待状态,因完成任务而被撤消,反映了一个程序在一定的数据集上运行的全部动态过程。
线程(Thread)是进程的一个实体,是CPU调度和分派的基本单位。线程不能够独立执行,必须依存在应用程序中,由应用程序提供多个线程执行控制。
线程和进程的关系是:线程是属于进程的,线程运行在进程空间内,同一进程所产生的线程共享同一内存空间,当进程退出时该进程所产生的线程都会被强制退出并清除。线程可与属于同一进程的其它线程共享进程所拥有的全部资源,但是其本身基本上不拥有系统资源,只拥有一点在运行中必不可少的信息(如程序计数器、一组寄存器和栈)。
根据进程与线程的设置,操作系统大致分为如下类型:
(1)单进程、单线程,MS-DOS大致是这种操作系统;
(2)多进程、单线程,多数UNIX(及类UNIX的LINUX)是这种操作系统;
(3)多进程、多线程,Win32(Windows NT/2000/XP等)、Solaris 2.x和OS/2都是这种操作系统;
(4)单进程、多线程,VxWorks是这种操作系统。
在操作系统中引入线程带来的主要好处是:
(1)在进程内创建、终止线程比创建、终止进程要快;
(2)同一进程内的线程间切换比进程间的切换要快,尤其是用户级线程间的切换。另外,线程的出现还因为以下几个原因:
(1)并发程序的并发执行,在多处理环境下更为有效。一个并发程序可以建立一个进程,而这个并发程序中的若干并发程序段就可以分别建立若干线程,使这些线程在不同的处理机上执行。
(2)每个进程具有独立的地址空间,而该进程内的所有线程共享该地址空间。这样可以解决父子进程模型中,子进程必须复制父进程地址空间的问题。
(3)线程对解决客户/服务器模型非常有效。
Win32进程
1、进程间通信( IPC)
Win32进程间通信的方式主要有:
(1)剪贴板(Clip Board);
(2)动态数据交换(Dynamic Data Exchange);
(3)部件对象模型(Component Object Model);
(4)文件映射(File Mapping);
(5)邮件槽(Mail Slots);
(6)管道(Pipes);
(7)Win32套接字( Socket);
(8)远程过程调用(Remote Procedure Call);
(9)WM_COPYDATA消息(WM_COPYDATA Message)。
2、获取进程信息
在WIN32中,可使用在PSAPI .DLL中提供的Process status Helper函数帮助我们获取进程信息。
(1)EnumProcesses()函数可以获取进程的ID,其原型为:
| BOOL EnumProcesses(DWORD * lpidProcess, DWORD cb, DWORD*cbNeeded); |
参数lpidProcess:一个足够大的DWORD类型的数组,用于存放进程的ID值;
参数cb:存放进程ID值的数组的最大长度,是一个DWORD类型的数据;
参数cbNeeded:指向一个DWORD类型数据的指针,用于返回进程的数目;
函数返回值:如果调用成功,返回TRUE,同时将所有进程的ID值存放在lpidProcess参数所指向的数组中,进程个数存放在cbNeeded参数所指向的变量中;如果调用失败,返回FALSE。
(2)GetModuleFileNameExA()函数可以实现通过进程句柄获取进程文件名,其原型为:
| DWORD GetModuleFileNameExA(HANDLE hProcess, HMODULE hModule,LPTSTR lpstrFileName, DWORD nsize); |
参数hProcess:接受进程句柄的参数,是HANDLE类型的变量;
参数hModule:指针型参数,在本文的程序中取值为NULL;
参数lpstrFileName:LPTSTR类型的指针,用于接受主调函数传递来的用于存放进程名的字符数组指针;
参数nsize:lpstrFileName所指数组的长度;
函数返回值:如果调用成功,返回一个大于0的DWORD类型的数据,同时将hProcess所对应的进程名存放在lpstrFileName参数所指向的数组中;加果调用失败,则返回0。
通过下列代码就可以遍历系统中的进程,获得进程列表:
| //获取当前进程总数 EnumProcesses(process_ids, sizeof(process_ids), &num_processes); //遍历进程 for (int i = 0; i < num_processes; i++) { //根据进程ID获取句柄 process[i] = OpenProcess(PROCESS_QUERY_INFORMATION | PROCESS_VM_READ, 0, process_ids[i]); //通过句柄获取进程文件名 if (GetModuleFileNameExA(process[i], NULL, File_name, sizeof(fileName))) cout << fileName << endl; } |
Win32线程
WIN32靠线程的优先级(达到抢占式多任务的目的)及分配给线程的CPU时间来调度线程。WIN32本身的许多应用程序也利用了多线程的特性,如任务管理器等。
本质而言,一个处理器同一时刻只能执行一个线程("微观串行")。WIN32多任务机制使得CPU好像在同时处理多个任务一样,实现了"宏观并行"。其多线程调度的机制为:
(1)运行一个线程,直到被中断或线程必须等待到某个资源可用;
(2)保存当前执行线程的描述表(上下文);
(3)装入下一执行线程的描述表(上下文);
(4)若存在等待被执行的线程,则重复上述过程。
WIN32下的线程可能具有不同的优先级,优先级的范围为0~31,共32级,其中31表示最高优先级,优先级0为系统保留。它们可以分成两类,即实时优先级和可变优先级:
(1)实时优先级从16到31,是实时程序所用的高优先级线程,如许多监控类应用程序;
(2)可变优先级从1到15,绝大多数程序的优先级都在这个范围内。。WIN32调度器为了优化系统响应时间,在它们执行过程中可动态调整它们的优先级。
多线程确实给应用开发带来了许多好处,但并非任何情况下都要使用多线程,一定要根据应用程序的具体情况来综合考虑。一般来说,在以下情况下可以考虑使用多线程:
(1)应用程序中的各任务相对独立;
(2)某些任务耗时较多;
(3)各任务需要有不同的优先级。
另外,对于一些实时系统应用,应考虑多线程。
Win32核心对象
WIN32核心对象包括进程、线程、文件、事件、信号量、互斥体和管道,核心对象可能有不只一个拥有者,甚至可以跨进程。有一组WIN32 API与核心对象息息相关:
(1)WaitForSingleObject,用于等待对象的"激活",其函数原型为:
| DWORD WaitForSingleObject( HANDLE hHandle, // 等待对象的句柄 DWORD dwMilliseconds // 等待毫秒数,INFINITE表示无限等待 ); |
可以作为WaitForSingleObject第一个参数的对象包括:Change notification、Console input、Event、Job、Memory resource notification、Mutex、Process、Semaphore、Thread和Waitable timer。
如果等待的对象不可用,那么线程就会挂起,直到对象可用线程才会被唤醒。对不同的对象,WaitForSingleObject表现为不同的含义。例如,使用 WaitForSingleObject(hThread,…)可以判断一个线程是否结束;使用WaitForSingleObject (hMutex,…)可以判断是否能够进入临界区;而WaitForSingleObject (hProcess,… )则表现为等待一个进程的结束。
与WaitForSingleObject对应还有一个WaitForMultipleObjects函数,可以用于等待多个对象,其原型为:
| DWORD WaitForMultipleObjects(DWORD nCount,const HANDLE* pHandles,BOOL bWaitAll,DWORD dwMilliseconds); |
(2)CloseHandle,用于关闭对象,其函数原型为:
| BOOL CloseHandle(HANDLE hObject); |
如果函数执行成功,则返回TRUE;否则返回FALSE,我们可以通过GetLastError函数进一步可以获得错误原因。
C运行时库
在VC++6.0中,有两种多线程编程方法:一是使用C运行时库及WIN32 API函数,另一种方法是使用MFC,MFC对多线程开发有强大的支持。
标准C运行时库是1970年问世的,当时还没有多线程的概念。因此,C运行时库早期的设计者们不可能考虑到让其支持多线程应用程序。
Visual C++提供了两种版本的C运行时库,-个版本供单线程应用程序调用,另一个版本供多线程应用程序调用。多线程运行时库与单线程运行时库有两个重大差别:
(1)类似errno的全局变量,每个线程单独设置一个;
这样从每个线程中可以获取正确的错误信息。
(2)多线程库中的数据结构以同步机制加以保护。
这样可以避免访问时候的冲突。
Visual C++提供的多线程运行时库又分为静态链接库和动态链接库两类,而每一类运行时库又可再分为debug版和release版,因此Visual C++共提供了6个运行时库。如下表:
| C运行时库 | 库文件 |
| Single thread(static link) | libc.lib |
| Debug single thread(static link) | Libcd.lib |
| MultiThread(static link) | libcmt.lib |
| Debug multiThread(static link) | libcmtd.lib |
| MultiThread(dynamic link) | msvert.lib |
| Debug multiThread(dynamic link) | msvertd.lib |
如果不使用VC多线程C运行时库来生成多线程程序,必须执行下列操作:
(1)使用标准 C 库(基于单线程)并且只允许可重入函数集进行库调用;
(2)使用 Win32 API 线程管理函数,如 CreateThread;
(3)通过使用 Win32 服务(如信号量和 EnterCriticalSection 及 LeaveCriticalSection 函数),为不可重入的函数提供自己的同步。
如果使用标准 C 库而调用VC运行时库函数,则在程序的link阶段会提示如下错误:
| error LNK2001: unresolved external symbol __endthreadex error LNK2001: unresolved external symbol __beginthreadex |
二.深入浅出Win32多线程程序设计之线程控制
WIN32线程控制主要实现线程的创建、终止、挂起和
恢复等操作,这些操作都依赖于WIN32提供的一组API和具体编译器的C运行时
库函数。
1.线程函数
在启动一个线程之前,必须为线程编写一个全局的线程函数,这个线程函数接受一个32位的LPVOID作为参数,返回一个UINT,线程函数的结构为:
在线程处理代码部分通常包括一个死循环,该循环中先等待某事情的发生,再处理相关的工作:
一般来说,C++的类成员函数不能作为线程函数。这是因为在类中定义的成员函数,编译器会给其加上this指针。请看下列程序:
程序编译时出现如下错误:
再看下列程序:
程序编译时会出错:
如果一定要以类成员函数作为线程函数,通常有如下解决方案:
(1)将该成员函数声明为static类型, 去掉this指针;
我们将上述二个程序改变为:
均编译通过。
将成员函数声明为静态虽然可以解决作为线程函数的问题,但是它带来了新的问题,那就是static成员函数只能 访问static成员。解决此问题的一种途径是可以在调用类静态成员函数(线程函数)时将this指针作为参数传入,并在改线程函数中用强制类型转换将this转换成指向该类的指针,通过该指针访问非静态成员。
(2)不定义类成员函数为线程函数,而将线程 函数定义为类的友元函数。这样,线程函数也可以有类成员函数同等的权限;
我们将程序修改为:
(3)可以对非静态成员函数实现回调,并访问非静态成员,此法涉及到一些高级技巧,在此不再详述。
2.创建线程
进程的主线程由操作系统自动生成,Win32提供了CreateThread API来完成用户线程的创建,该API的原型为:
如果使用C/C++语言编写多线程应用程序,一定不能使用操作系统提供的CreateThread API,而应该使用C/C++运行时库中的_beginthread(或_beginthreadex),其函数原型为:
_beginthread函数与Win32 API 中的CreateThread函数类似,但有如下差异:
(1)通过_beginthread函数我们可以利用其参数列表arglist将多个参数传递到线程;
(2)_beginthread 函数初始化某些 C 运行时库变量,在线程中若需要使用 C 运行时库。
3.终止线程
线程的终止有如下四种方式:
(1)线程函数返回;
(2)线程自身调用ExitThread 函数即终止自己,其原型为:
它将参数fuExitCode设置为线程的退出码。
注意:如果使用C/C++编写代码,我们应该使用C/C++运行时库函数_endthread (_endthreadex)终止线程,决不能使用ExitThread!
_endthread 函数对于线程内的条件终止很有用。例如,专门用于通信处理的线程若无法获取对通信端口的控制,则会退出。
(3)同一进程或其他进程的线程调用TerminateThread函数,其原型为:
该函数用来结束由hThread参数指定的线程,并把dwExitCode设成该线程的退出码。当某个线程不再响应时,我们可以用其他线程调用该函数来终止这个不响应的线程。
(4)包含线程的进程终止。
最好使用第1种方式终止线程,第2~4种方式都不宜采用。
4.挂起与恢复线程
当我们创建线程的时候,如果给其传入CREATE_SUSPENDED标志,则该线程创建后被挂起,我们应使用ResumeThread恢复它:
如果ResumeThread函数运行成功,它将返回线程的前一个暂停计数,否则返回0x FFFFFFFF。
对于没有被挂起的线程,程序员可以调用SuspendThread函数强行挂起之:
一个线程可以被挂起多次。线程可以自行暂停运行,但是不能自行恢复运行。如果一个线程被挂起n次,则该线程也必须被恢复n次才可能得以执行。
5.设置线程优先级
当一个线程被首次创建时,它的优先级等同于它所属进程的优先级。在单个进程内可以通过调用SetThreadPriority函数改变线程的相对优先级。一个线程的优先级是相对于其所属进程的优先级而言的。
其中参数hThread是指向待修改优先级线程的句柄,线程与包含它的进程的优先级关系如下:
线程优先级 = 进程类基本优先级 + 线程相对优先级
进程类的基本优先级包括:
(1)实时:REALTIME_PRIORITY_CLASS;
(2)高:HIGH _PRIORITY_CLASS;
(3)高于正常:ABOVE_NORMAL_PRIORITY_CLASS;
(4)正常:NORMAL _PRIORITY_CLASS;
(5)低于正常:BELOW_ NORMAL _PRIORITY_CLASS;
(6)空闲:IDLE_PRIORITY_CLASS。
我们从Win32任务管理器中可以直观的看到这六个进程类优先级,如下图:
线程的相对优先级包括:
(1)空闲:THREAD_PRIORITY_IDLE;
(2)最低线程:THREAD_PRIORITY_LOWEST;
(3)低于正常线程:THREAD_PRIORITY_BELOW_NORMAL;
(4)正常线程:THREAD_PRIORITY_ NORMAL (缺省);
(5)高于正常线程:THREAD_PRIORITY_ABOVE_NORMAL;
(6)最高线程:THREAD_PRIORITY_HIGHEST;
(7)关键时间:THREAD_PRIOTITY_CRITICAL。
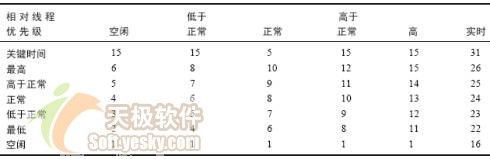
下图给出了进程优先级和线程相对优先级的映射关系:
例如:
6.睡眠
该函数可使线程暂停自己的运行,直到dwMilliseconds毫秒过去为止。它告诉系统,自身不想在某个时间段内被调度。
7.其它重要API
获得线程优先级
一个线程被创建时,就会有一个默认的优先级,但是有时要动态地改变一个线程的优先级,有时需获得一个线程的优先级。
如果函数执行发生错误,会返回THREAD_PRIORITY_ERROR_RETURN标志。如果函数成功地执行,会返回优先级标志。
获得线程退出码
如果执行成功,GetExitCodeThread返回TRUE,退出码被lpExitCode指向内存记录;否则返回FALSE,我们可通过GetLastError()获知错误原因。如果线程尚未结束,lpExitCode带回来的将是STILL_ALIVE。
由于GetThreadContext和SetThreadContext可以操作CPU内部的寄存器,因此在一些高级技巧的编程中有一定应用。譬如,调试器可利用GetThreadContext挂起被调试线程获取其上下文,并设置上下文中的标志寄存器中的陷阱标志位,最后通过 SetThreadContext使设置生效来进行单步调试。
8.实例
以下程序使用CreateThread创建两个线程,在这两个线程中Sleep一段时间,主线程通过GetExitCodeThread来判断两个线程是否结束运行:
通过下面的程序我们可以看出多线程程序运行顺序的难以预料以及WINAPI的CreateThread函数与C运行时库的_beginthread的差别:
运行的输出具有很大的随机性,这里摘取了几次结果的一部分(几乎每一次都不同):
如果我们使用标准C库函数而不是多线程版的运行时库,则程序可能输出"3333444444"这样的结果,而使用多线程运行时库后,则可避免这一问题。
下列程序在主线程中创建一个SecondThread,在SecondThread线程中通过自增对Counter计数到1000000,主线程一直等待其结束:
1.线程函数
在启动一个线程之前,必须为线程编写一个全局的线程函数,这个线程函数接受一个32位的LPVOID作为参数,返回一个UINT,线程函数的结构为:
| UINT ThreadFunction(LPVOID pParam) { //线程处理代码 return0; } |
在线程处理代码部分通常包括一个死循环,该循环中先等待某事情的发生,再处理相关的工作:
| while(1) { WaitForSingleObject(…,…);//或WaitForMultipleObjects(…) //Do something } |
一般来说,C++的类成员函数不能作为线程函数。这是因为在类中定义的成员函数,编译器会给其加上this指针。请看下列程序:
| #include "windows.h" #include <process.h> class ExampleTask { public: void taskmain(LPVOID param); void StartTask(); }; void ExampleTask::taskmain(LPVOID param) {} void ExampleTask::StartTask() { _beginthread(taskmain,0,NULL); } int main(int argc, char* argv[]) { ExampleTask realTimeTask; realTimeTask.StartTask(); return 0; } |
程序编译时出现如下错误:
| error C2664: '_beginthread' : cannot convert parameter 1 from 'void (void *)' to 'void (__cdecl *)(void *)' None of the functions with this name in scope match the target type |
再看下列程序:
| #include "windows.h" #include <process.h> class ExampleTask { public: void taskmain(LPVOID param); }; void ExampleTask::taskmain(LPVOID param) {} int main(int argc, char* argv[]) { ExampleTask realTimeTask; _beginthread(ExampleTask::taskmain,0,NULL); return 0; } |
程序编译时会出错:
| error C2664: '_beginthread' : cannot convert parameter 1 from 'void (void *)' to 'void (__cdecl *)(void *)' None of the functions with this name in scope match the target type |
如果一定要以类成员函数作为线程函数,通常有如下解决方案:
(1)将该成员函数声明为static类型, 去掉this指针;
我们将上述二个程序改变为:
| #include "windows.h" #include <process.h> class ExampleTask { public: void static taskmain(LPVOID param); void StartTask(); }; void ExampleTask::taskmain(LPVOID param) {} void ExampleTask::StartTask() { _beginthread(taskmain,0,NULL); } int main(int argc, char* argv[]) { ExampleTask realTimeTask; realTimeTask.StartTask(); return 0; } 和 #include "windows.h" #include <process.h> class ExampleTask { public: void static taskmain(LPVOID param); }; void ExampleTask::taskmain(LPVOID param) {} int main(int argc, char* argv[]) { _beginthread(ExampleTask::taskmain,0,NULL); return 0; } |
均编译通过。
将成员函数声明为静态虽然可以解决作为线程函数的问题,但是它带来了新的问题,那就是static成员函数只能 访问static成员。解决此问题的一种途径是可以在调用类静态成员函数(线程函数)时将this指针作为参数传入,并在改线程函数中用强制类型转换将this转换成指向该类的指针,通过该指针访问非静态成员。
(2)不定义类成员函数为线程函数,而将线程 函数定义为类的友元函数。这样,线程函数也可以有类成员函数同等的权限;
我们将程序修改为:
| #include "windows.h" #include <process.h> class ExampleTask { public: friend void taskmain(LPVOID param); void StartTask(); }; void taskmain(LPVOID param) { ExampleTask * pTaskMain = (ExampleTask *) param; //通过pTaskMain指针引用 } void ExampleTask::StartTask() { _beginthread(taskmain,0,this); } int main(int argc, char* argv[]) { ExampleTask realTimeTask; realTimeTask.StartTask(); return 0; } |
(3)可以对非静态成员函数实现回调,并访问非静态成员,此法涉及到一些高级技巧,在此不再详述。
2.创建线程
进程的主线程由操作系统自动生成,Win32提供了CreateThread API来完成用户线程的创建,该API的原型为:
| HANDLE CreateThread( LPSECURITY_ATTRIBUTES lpThreadAttributes,//Pointer to a SECURITY_ATTRIBUTES structure SIZE_T dwStackSize, //Initial size of the stack, in bytes. LPTHREAD_START_ROUTINE lpStartAddress, LPVOID lpParameter, //Pointer to a variable to be passed to the thread DWORD dwCreationFlags, //Flags that control the creation of the thread LPDWORD lpThreadId //Pointer to a variable that receives the thread identifier ); |
如果使用C/C++语言编写多线程应用程序,一定不能使用操作系统提供的CreateThread API,而应该使用C/C++运行时库中的_beginthread(或_beginthreadex),其函数原型为:
| uintptr_t _beginthread( void( __cdecl *start_address )( void * ), //Start address of routine that begins execution of new thread unsigned stack_size, //Stack size for new thread or 0. void *arglist //Argument list to be passed to new thread or NULL ); uintptr_t _beginthreadex( void *security,//Pointer to a SECURITY_ATTRIBUTES structure unsigned stack_size, unsigned ( __stdcall *start_address )( void * ), void *arglist, unsigned initflag,//Initial state of new thread (0 for running or CREATE_SUSPENDED for suspended); unsigned *thrdaddr ); |
_beginthread函数与Win32 API 中的CreateThread函数类似,但有如下差异:
(1)通过_beginthread函数我们可以利用其参数列表arglist将多个参数传递到线程;
(2)_beginthread 函数初始化某些 C 运行时库变量,在线程中若需要使用 C 运行时库。
3.终止线程
线程的终止有如下四种方式:
(1)线程函数返回;
(2)线程自身调用ExitThread 函数即终止自己,其原型为:
| VOID ExitThread(UINT fuExitCode ); |
它将参数fuExitCode设置为线程的退出码。
注意:如果使用C/C++编写代码,我们应该使用C/C++运行时库函数_endthread (_endthreadex)终止线程,决不能使用ExitThread!
_endthread 函数对于线程内的条件终止很有用。例如,专门用于通信处理的线程若无法获取对通信端口的控制,则会退出。
(3)同一进程或其他进程的线程调用TerminateThread函数,其原型为:
| BOOL TerminateThread(HANDLE hThread,DWORD dwExitCode); |
该函数用来结束由hThread参数指定的线程,并把dwExitCode设成该线程的退出码。当某个线程不再响应时,我们可以用其他线程调用该函数来终止这个不响应的线程。
(4)包含线程的进程终止。
最好使用第1种方式终止线程,第2~4种方式都不宜采用。
4.挂起与恢复线程
当我们创建线程的时候,如果给其传入CREATE_SUSPENDED标志,则该线程创建后被挂起,我们应使用ResumeThread恢复它:
| DWORD ResumeThread(HANDLE hThread); |
如果ResumeThread函数运行成功,它将返回线程的前一个暂停计数,否则返回0x FFFFFFFF。
对于没有被挂起的线程,程序员可以调用SuspendThread函数强行挂起之:
| DWORD SuspendThread(HANDLE hThread); |
一个线程可以被挂起多次。线程可以自行暂停运行,但是不能自行恢复运行。如果一个线程被挂起n次,则该线程也必须被恢复n次才可能得以执行。
5.设置线程优先级
当一个线程被首次创建时,它的优先级等同于它所属进程的优先级。在单个进程内可以通过调用SetThreadPriority函数改变线程的相对优先级。一个线程的优先级是相对于其所属进程的优先级而言的。
| BOOL SetThreadPriority(HANDLE hThread, int nPriority); |
其中参数hThread是指向待修改优先级线程的句柄,线程与包含它的进程的优先级关系如下:
线程优先级 = 进程类基本优先级 + 线程相对优先级
进程类的基本优先级包括:
(1)实时:REALTIME_PRIORITY_CLASS;
(2)高:HIGH _PRIORITY_CLASS;
(3)高于正常:ABOVE_NORMAL_PRIORITY_CLASS;
(4)正常:NORMAL _PRIORITY_CLASS;
(5)低于正常:BELOW_ NORMAL _PRIORITY_CLASS;
(6)空闲:IDLE_PRIORITY_CLASS。
我们从Win32任务管理器中可以直观的看到这六个进程类优先级,如下图:

|
线程的相对优先级包括:
(1)空闲:THREAD_PRIORITY_IDLE;
(2)最低线程:THREAD_PRIORITY_LOWEST;
(3)低于正常线程:THREAD_PRIORITY_BELOW_NORMAL;
(4)正常线程:THREAD_PRIORITY_ NORMAL (缺省);
(5)高于正常线程:THREAD_PRIORITY_ABOVE_NORMAL;
(6)最高线程:THREAD_PRIORITY_HIGHEST;
(7)关键时间:THREAD_PRIOTITY_CRITICAL。
下图给出了进程优先级和线程相对优先级的映射关系:
|
例如:
| HANDLE hCurrentThread = GetCurrentThread(); //获得该线程句柄 SetThreadPriority(hCurrentThread, THREAD_PRIORITY_LOWEST); |
6.睡眠
| VOID Sleep(DWORD dwMilliseconds); |
该函数可使线程暂停自己的运行,直到dwMilliseconds毫秒过去为止。它告诉系统,自身不想在某个时间段内被调度。
7.其它重要API
获得线程优先级
一个线程被创建时,就会有一个默认的优先级,但是有时要动态地改变一个线程的优先级,有时需获得一个线程的优先级。
| Int GetThreadPriority (HANDLE hThread); |
如果函数执行发生错误,会返回THREAD_PRIORITY_ERROR_RETURN标志。如果函数成功地执行,会返回优先级标志。
获得线程退出码
| BOOL WINAPI GetExitCodeThread( HANDLE hThread, LPDWORD lpExitCode ); |
如果执行成功,GetExitCodeThread返回TRUE,退出码被lpExitCode指向内存记录;否则返回FALSE,我们可通过GetLastError()获知错误原因。如果线程尚未结束,lpExitCode带回来的将是STILL_ALIVE。
| 获得/设置线程上下文 BOOL WINAPI GetThreadContext( HANDLE hThread, LPCONTEXT lpContext ); BOOL WINAPI SetThreadContext( HANDLE hThread, CONST CONTEXT *lpContext ); |
由于GetThreadContext和SetThreadContext可以操作CPU内部的寄存器,因此在一些高级技巧的编程中有一定应用。譬如,调试器可利用GetThreadContext挂起被调试线程获取其上下文,并设置上下文中的标志寄存器中的陷阱标志位,最后通过 SetThreadContext使设置生效来进行单步调试。
8.实例
以下程序使用CreateThread创建两个线程,在这两个线程中Sleep一段时间,主线程通过GetExitCodeThread来判断两个线程是否结束运行:
| #define WIN32_LEAN_AND_MEAN #include <stdio.h> #include <stdlib.h> #include <windows.h> #include <conio.h> DWORD WINAPI ThreadFunc(LPVOID); int main() { HANDLE hThrd1; HANDLE hThrd2; DWORD exitCode1 = 0; DWORD exitCode2 = 0; DWORD threadId; hThrd1 = CreateThread(NULL, 0, ThreadFunc, (LPVOID)1, 0, &threadId ); if (hThrd1) printf("Thread 1 launched\n"); hThrd2 = CreateThread(NULL, 0, ThreadFunc, (LPVOID)2, 0, &threadId ); if (hThrd2) printf("Thread 2 launched\n"); // Keep waiting until both calls to GetExitCodeThread succeed AND // neither of them returns STILL_ACTIVE. for (;;) { printf("Press any key to exit..\n"); getch(); GetExitCodeThread(hThrd1, &exitCode1); GetExitCodeThread(hThrd2, &exitCode2); if ( exitCode1 == STILL_ACTIVE ) puts("Thread 1 is still running!"); if ( exitCode2 == STILL_ACTIVE ) puts("Thread 2 is still running!"); if ( exitCode1 != STILL_ACTIVE && exitCode2 != STILL_ACTIVE ) break; } CloseHandle(hThrd1); CloseHandle(hThrd2); printf("Thread 1 returned %d\n", exitCode1); printf("Thread 2 returned %d\n", exitCode2); return EXIT_SUCCESS; } /* * Take the startup value, do some simple math on it, * and return the calculated value. */ DWORD WINAPI ThreadFunc(LPVOID n) { Sleep((DWORD)n*1000*2); return (DWORD)n * 10; } |
通过下面的程序我们可以看出多线程程序运行顺序的难以预料以及WINAPI的CreateThread函数与C运行时库的_beginthread的差别:
| #define WIN32_LEAN_AND_MEAN #include <stdio.h> #include <stdlib.h> #include <windows.h> DWORD WINAPI ThreadFunc(LPVOID); int main() { HANDLE hThrd; DWORD threadId; int i; for (i = 0; i < 5; i++) { hThrd = CreateThread(NULL, 0, ThreadFunc, (LPVOID)i, 0, &threadId); if (hThrd) { printf("Thread launched %d\n", i); CloseHandle(hThrd); } } // Wait for the threads to complete. Sleep(2000); return EXIT_SUCCESS; } DWORD WINAPI ThreadFunc(LPVOID n) { int i; for (i = 0; i < 10; i++) printf("%d%d%d%d%d%d%d%d\n", n, n, n, n, n, n, n, n); return 0; } |
运行的输出具有很大的随机性,这里摘取了几次结果的一部分(几乎每一次都不同):



|
如果我们使用标准C库函数而不是多线程版的运行时库,则程序可能输出"3333444444"这样的结果,而使用多线程运行时库后,则可避免这一问题。
下列程序在主线程中创建一个SecondThread,在SecondThread线程中通过自增对Counter计数到1000000,主线程一直等待其结束:
| #include <Win32.h> #include <stdio.h> #include <process.h> unsigned Counter; unsigned __stdcall SecondThreadFunc(void *pArguments) { printf("In second thread...\n"); while (Counter < 1000000) Counter++; _endthreadex(0); return 0; } int main() { HANDLE hThread; unsigned threadID; printf("Creating second thread...\n"); // Create the second thread. hThread = (HANDLE)_beginthreadex(NULL, 0, &SecondThreadFunc, NULL, 0, &threadID); // Wait until second thread terminates WaitForSingleObject(hThread, INFINITE); printf("Counter should be 1000000; it is-> %d\n", Counter); // Destroy the thread object. CloseHandle(hThread); } |
三.深入浅出Win32多线程程序设计之线程通信
简介
线程之间通信的两个基本问题是互斥和同步。
线程同步是指线程之间所具有的一种制约关系,一个线程的执行依赖另一个线程的消息,当它没有得到另一个线程的消息时应等待,直到消息到达时才被唤醒。
线程互斥是指对于共享的操作系统资源(指的是广义的"资源",而不是Windows的.res文件,譬如全局变量就是一种共享资源),在各线程访问时的排它性。当有若干个线程都要使用某一共享资源时,任何时刻最多只允许一个线程去使用,其它要使用该资源的线程必须等待,直到占用资源者释放该资源。
线程互斥是一种特殊的线程同步。
实际上,互斥和同步对应着线程间通信发生的两种情况:
(1)当有多个线程访问共享资源而不使资源被破坏时;
(2)当一个线程需要将某个任务已经完成的情况 通知另外一个或多个线程时。
在 WIN32中,同步机制主要有以下几种:
(1)事件(Event);
(2)信号量(semaphore);
(3)互斥量(mutex);
(4)临界区( Critical section)。
全局变量
因为进程中的所有线程均可以访问所有的全局变量,因而全局变量成为Win32多线程通信的最简单方式。例如:
上述程序中使用全局变量和while循环查询进行线程间同步,实际上,这是一种应该避免的方法,因为:
(1)当主线程必须使自己与ThreadFunc函数的完成运行实现同步时,它并没有使自己进入睡眠状态。由于主线程没有进入睡眠状态,因此操作系统继续为它调度C P U时间,这就要占用其他线程的宝贵时间周期;
(2)当主线程的优先级高于执行ThreadFunc函数的线程时,就会发生globalFlag永远不能被赋值为true的情况。因为在这种情况下,系统决不会将任何时间片分配给ThreadFunc线程。
事件
事件(Event)是WIN32提供的最灵活的线程间同步方式,事件可以处于激发状态(signaled or true)或未激发状态(unsignal or false)。根据状态变迁方式的不同,事件可分为两类:
(1)手动设置:这种对象只可能用程序手动设置,在需要该事件或者事件发生时,采用SetEvent及ResetEvent来进行设置。
(2)自动恢复:一旦事件发生并被处理后,自动恢复到没有事件状态,不需要再次设置。
创建事件的函数原型为:
使用"事件"机制应注意以下事项:
(1)如果跨进程访问事件,必须对事件命名,在对事件命名的时候,要注意不要与系统命名空间中的其它全局命名对象冲突;
(2)事件是否要自动恢复;
(3)事件的初始状态设置。
由于event对象属于内核对象,故进程B可以调用OpenEvent函数通过对象的名字获得进程A中event对象的句柄,然后将这个句柄用于 ResetEvent、SetEvent和WaitForMultipleObjects等函数中。此法可以实现一个进程的线程控制另一进程中线程的运行,例如:
线程之间通信的两个基本问题是互斥和同步。
线程同步是指线程之间所具有的一种制约关系,一个线程的执行依赖另一个线程的消息,当它没有得到另一个线程的消息时应等待,直到消息到达时才被唤醒。
线程互斥是指对于共享的操作系统资源(指的是广义的"资源",而不是Windows的.res文件,譬如全局变量就是一种共享资源),在各线程访问时的排它性。当有若干个线程都要使用某一共享资源时,任何时刻最多只允许一个线程去使用,其它要使用该资源的线程必须等待,直到占用资源者释放该资源。
线程互斥是一种特殊的线程同步。
实际上,互斥和同步对应着线程间通信发生的两种情况:
(1)当有多个线程访问共享资源而不使资源被破坏时;
(2)当一个线程需要将某个任务已经完成的情况 通知另外一个或多个线程时。
在 WIN32中,同步机制主要有以下几种:
(1)事件(Event);
(2)信号量(semaphore);
(3)互斥量(mutex);
(4)临界区( Critical section)。
全局变量
因为进程中的所有线程均可以访问所有的全局变量,因而全局变量成为Win32多线程通信的最简单方式。例如:
| int var; //全局变量 UINT ThreadFunction(LPVOIDpParam) { var = 0; while (var < MaxValue) { //线程处理 ::InterlockedIncrement(long*) &var); } return 0; } 请看下列程序: int globalFlag = false; DWORD WINAPI ThreadFunc(LPVOID n) { Sleep(2000); globalFlag = true; return 0; } int main() { HANDLE hThrd; DWORD threadId; hThrd = CreateThread(NULL, 0, ThreadFunc, NULL, 0, &threadId); if (hThrd) { printf("Thread launched\n"); CloseHandle(hThrd); } while (!globalFlag) ; printf("exit\n"); } |
上述程序中使用全局变量和while循环查询进行线程间同步,实际上,这是一种应该避免的方法,因为:
(1)当主线程必须使自己与ThreadFunc函数的完成运行实现同步时,它并没有使自己进入睡眠状态。由于主线程没有进入睡眠状态,因此操作系统继续为它调度C P U时间,这就要占用其他线程的宝贵时间周期;
(2)当主线程的优先级高于执行ThreadFunc函数的线程时,就会发生globalFlag永远不能被赋值为true的情况。因为在这种情况下,系统决不会将任何时间片分配给ThreadFunc线程。
事件
事件(Event)是WIN32提供的最灵活的线程间同步方式,事件可以处于激发状态(signaled or true)或未激发状态(unsignal or false)。根据状态变迁方式的不同,事件可分为两类:
(1)手动设置:这种对象只可能用程序手动设置,在需要该事件或者事件发生时,采用SetEvent及ResetEvent来进行设置。
(2)自动恢复:一旦事件发生并被处理后,自动恢复到没有事件状态,不需要再次设置。
创建事件的函数原型为:
| HANDLE CreateEvent( LPSECURITY_ATTRIBUTES lpEventAttributes, // SECURITY_ATTRIBUTES结构指针,可为NULL BOOL bManualReset, // 手动/自动 // TRUE:在WaitForSingleObject后必须手动调用ResetEvent清除信号 // FALSE:在WaitForSingleObject后,系统自动清除事件信号 BOOL bInitialState, //初始状态 LPCTSTR lpName //事件的名称 ); |
使用"事件"机制应注意以下事项:
(1)如果跨进程访问事件,必须对事件命名,在对事件命名的时候,要注意不要与系统命名空间中的其它全局命名对象冲突;
(2)事件是否要自动恢复;
(3)事件的初始状态设置。
由于event对象属于内核对象,故进程B可以调用OpenEvent函数通过对象的名字获得进程A中event对象的句柄,然后将这个句柄用于 ResetEvent、SetEvent和WaitForMultipleObjects等函数中。此法可以实现一个进程的线程控制另一进程中线程的运行,例如:
| HANDLE hEvent=OpenEvent(EVENT_ALL_ACCESS,true,"MyEvent"); ResetEvent(hEvent); |
临界区
定义临界区变量
通常情况下,CRITICAL_SECTION结构体应该被定义为全局变量,以便于进程中的所有线程方便地按照变量名来引用该结构体。
初始化临界区
该函数用于对pcs所指的CRITICAL_SECTION结构体进行初始化。该函数只是设置了一些成员变量,它的运行一般不会失败,因此它采用了 VOID类型的返回值。该函数必须在任何线程调用EnterCriticalSection函数之前被调用,如果一个线程试图进入一个未初始化的 CRTICAL_SECTION,那么结果将是很难预计的。
删除临界区
进入临界区
离开临界区
使用临界区编程的一般方法是:
关于临界区的使用,有下列注意点:
(1)每个共享资源使用一个CRITICAL_SECTION变量;
(2)不要长时间运行关键代码段,当一个关键代码段长时间运行时,其他线程就会进入等待状态,这会降低应用程序的运行性能;
(3)如果需要同时访问多个资源,则可能连续调用EnterCriticalSection;
(4)Critical Section不是OS核心对象,如果进入临界区的线程"挂"了,将无法释放临界资源。这个缺点在Mutex中得到了弥补。
互斥
互斥量的作用是保证每次只能有一个线程获得互斥量而得以继续执行,使用CreateMutex函数创建:
Mutex是核心对象,可以跨进程访问,下面的代码给出了从另一进程访问命名Mutex的例子:
相关API:
使用互斥编程的一般方法是:
互斥(mutex)内核对象能够确保线程拥有对单个资源的互斥访问权。互斥对象的行为特性与临界区相同,但是互斥对象属于内核对象,而临界区则属于用户方式对象,因此这导致mutex与Critical Section的如下不同:
(1) 互斥对象的运行速度比关键代码段要慢;
(2) 不同进程中的多个线程能够访问单个互斥对象;
(3) 线程在等待访问资源时可以设定一个超时值。
下图更详细地列出了互斥与临界区的不同:
定义临界区变量
| CRITICAL_SECTION gCriticalSection; |
通常情况下,CRITICAL_SECTION结构体应该被定义为全局变量,以便于进程中的所有线程方便地按照变量名来引用该结构体。
初始化临界区
| VOID WINAPI InitializeCriticalSection( LPCRITICAL_SECTION lpCriticalSection //指向程序员定义的CRITICAL_SECTION变量 ); |
该函数用于对pcs所指的CRITICAL_SECTION结构体进行初始化。该函数只是设置了一些成员变量,它的运行一般不会失败,因此它采用了 VOID类型的返回值。该函数必须在任何线程调用EnterCriticalSection函数之前被调用,如果一个线程试图进入一个未初始化的 CRTICAL_SECTION,那么结果将是很难预计的。
删除临界区
| VOID WINAPI DeleteCriticalSection( LPCRITICAL_SECTION lpCriticalSection //指向一个不再需要的CRITICAL_SECTION变量 ); |
进入临界区
| VOID WINAPI EnterCriticalSection( LPCRITICAL_SECTION lpCriticalSection //指向一个你即将锁定的CRITICAL_SECTION变量 ); |
离开临界区
| VOID WINAPI LeaveCriticalSection( LPCRITICAL_SECTION lpCriticalSection //指向一个你即将离开的CRITICAL_SECTION变量 ); |
使用临界区编程的一般方法是:
| void UpdateData() { EnterCriticalSection(&gCriticalSection); ...//do something LeaveCriticalSection(&gCriticalSection); } |
关于临界区的使用,有下列注意点:
(1)每个共享资源使用一个CRITICAL_SECTION变量;
(2)不要长时间运行关键代码段,当一个关键代码段长时间运行时,其他线程就会进入等待状态,这会降低应用程序的运行性能;
(3)如果需要同时访问多个资源,则可能连续调用EnterCriticalSection;
(4)Critical Section不是OS核心对象,如果进入临界区的线程"挂"了,将无法释放临界资源。这个缺点在Mutex中得到了弥补。
互斥
互斥量的作用是保证每次只能有一个线程获得互斥量而得以继续执行,使用CreateMutex函数创建:
| HANDLE CreateMutex( LPSECURITY_ATTRIBUTES lpMutexAttributes, // 安全属性结构指针,可为NULL BOOL bInitialOwner, //是否占有该互斥量,TRUE:占有,FALSE:不占有 LPCTSTR lpName //信号量的名称 ); |
Mutex是核心对象,可以跨进程访问,下面的代码给出了从另一进程访问命名Mutex的例子:
| HANDLE hMutex; hMutex = OpenMutex(MUTEX_ALL_ACCESS, FALSE, L"mutexName"); if (hMutex){ … } else{ … } |
相关API:
| BOOL WINAPI ReleaseMutex( HANDLE hMutex ); |
使用互斥编程的一般方法是:
| void UpdateResource() { WaitForSingleObject(hMutex,…); ...//do something ReleaseMutex(hMutex); } |
互斥(mutex)内核对象能够确保线程拥有对单个资源的互斥访问权。互斥对象的行为特性与临界区相同,但是互斥对象属于内核对象,而临界区则属于用户方式对象,因此这导致mutex与Critical Section的如下不同:
(1) 互斥对象的运行速度比关键代码段要慢;
(2) 不同进程中的多个线程能够访问单个互斥对象;
(3) 线程在等待访问资源时可以设定一个超时值。
下图更详细地列出了互斥与临界区的不同:

|
信号量
信号量是维护0到指定最大值之间的同步对象。信号量状态在其计数大于0时是有信号的,而其计数是0时是无信号的。信号量对象在控制上可以支持有限数量共享资源的访问。
信号量的特点和用途可用下列几句话定义:
(1)如果当前资源的数量大于0,则信号量有效;
(2)如果当前资源数量是0,则信号量无效;
(3)系统决不允许当前资源的数量为负值;
(4)当前资源数量决不能大于最大资源数量。
创建信号量
释放信号量
通过调用ReleaseSemaphore函数,线程就能够对信标的当前资源数量进行递增,该函数原型为:
打开信号量
和其他核心对象一样,信号量也可以通过名字跨进程访问,打开信号量的API为:
互锁访问
当必须以原子操作方式来修改单个值时,互锁访问函数是相当有用的。所谓原子访问,是指线程在访问资源时能够确保所有其他线程都不在同一时间内访问相同的资源。
请看下列代码:
运行ThreadFunc1和ThreadFunc2线程,结果是不可预料的,因为globalVar++并不对应着一条机器指令,我们看看globalVar++的反汇编代码:
在"mov eax,[globalVar (0042d3f0)]" 指令与"add eax,1" 指令以及"add eax,1" 指令与"mov [globalVar (0042d3f0)],eax"指令之间都可能发生线程切换,使得程序的执行后globalVar的结果不能确定。我们可以使用 InterlockedExchangeAdd函数解决这个问题:
InterlockedExchangeAdd保证对变量globalVar的访问具有"原子性"。互锁访问的控制速度非常快,调用一个互锁函数的CPU周期通常小于50,不需要进行用户方式与内核方式的切换(该切换通常需要运行1000个CPU周期)。
互锁访问函数的缺点在于其只能对单一变量进行原子访问,如果要访问的资源比较复杂,仍要使用临界区或互斥。
可等待定时器
可等待定时器是在某个时间或按规定的间隔时间发出自己的信号通知的内核对象。它们通常用来在某个时间执行某个操作。
创建可等待定时器
设置可等待定时器
可等待定时器对象在非激活状态下被创建,程序员应调用 SetWaitableTimer函数来界定定时器在何时被激活:
取消可等待定时器
打开可等待定时器
作为一种内核对象,WaitableTimer也可以被其他进程以名字打开:
实例
下面给出的一个程序可能发生死锁现象:
运行这个程序,在中途一旦发生这样的输出:
线程1占用临界区1
线程2占用临界区2
或
线程2占用临界区2
线程1占用临界区1
或
线程1占用临界区2
线程2占用临界区1
或
线程2占用临界区1
线程1占用临界区2
程序就"死"掉了,再也运行不下去。因为这样的输出,意味着两个线程相互等待对方释放临界区,也即出现了死锁。
如果我们将线程2的控制函数改为:
再次运行程序,死锁被消除,程序不再挡掉。这是因为我们改变了线程2中获得临界区1、2的顺序,消除了线程1、2相互等待资源的可能性。
由此我们得出结论,在使用线程间的同步机制时,要特别留心死锁的发生。
四.深入浅出Win32多线程程序设计之综合实例
信号量是维护0到指定最大值之间的同步对象。信号量状态在其计数大于0时是有信号的,而其计数是0时是无信号的。信号量对象在控制上可以支持有限数量共享资源的访问。
信号量的特点和用途可用下列几句话定义:
(1)如果当前资源的数量大于0,则信号量有效;
(2)如果当前资源数量是0,则信号量无效;
(3)系统决不允许当前资源的数量为负值;
(4)当前资源数量决不能大于最大资源数量。
创建信号量
| HANDLE CreateSemaphore ( PSECURITY_ATTRIBUTE psa, LONG lInitialCount, //开始时可供使用的资源数 LONG lMaximumCount, //最大资源数 PCTSTR pszName); |
释放信号量
通过调用ReleaseSemaphore函数,线程就能够对信标的当前资源数量进行递增,该函数原型为:
| BOOL WINAPI ReleaseSemaphore( HANDLE hSemaphore, LONG lReleaseCount, //信号量的当前资源数增加lReleaseCount LPLONG lpPreviousCount ); |
打开信号量
和其他核心对象一样,信号量也可以通过名字跨进程访问,打开信号量的API为:
| HANDLE OpenSemaphore ( DWORD fdwAccess, BOOL bInherithandle, PCTSTR pszName ); |
互锁访问
当必须以原子操作方式来修改单个值时,互锁访问函数是相当有用的。所谓原子访问,是指线程在访问资源时能够确保所有其他线程都不在同一时间内访问相同的资源。
请看下列代码:
| int globalVar = 0; DWORD WINAPI ThreadFunc1(LPVOID n) { globalVar++; return 0; } DWORD WINAPI ThreadFunc2(LPVOID n) { globalVar++; return 0; } |
运行ThreadFunc1和ThreadFunc2线程,结果是不可预料的,因为globalVar++并不对应着一条机器指令,我们看看globalVar++的反汇编代码:
| 00401038 mov eax,[globalVar (0042d3f0)] 0040103D add eax,1 00401040 mov [globalVar (0042d3f0)],eax |
在"mov eax,[globalVar (0042d3f0)]" 指令与"add eax,1" 指令以及"add eax,1" 指令与"mov [globalVar (0042d3f0)],eax"指令之间都可能发生线程切换,使得程序的执行后globalVar的结果不能确定。我们可以使用 InterlockedExchangeAdd函数解决这个问题:
| int globalVar = 0; DWORD WINAPI ThreadFunc1(LPVOID n) { InterlockedExchangeAdd(&globalVar,1); return 0; } DWORD WINAPI ThreadFunc2(LPVOID n) { InterlockedExchangeAdd(&globalVar,1); return 0; } |
InterlockedExchangeAdd保证对变量globalVar的访问具有"原子性"。互锁访问的控制速度非常快,调用一个互锁函数的CPU周期通常小于50,不需要进行用户方式与内核方式的切换(该切换通常需要运行1000个CPU周期)。
互锁访问函数的缺点在于其只能对单一变量进行原子访问,如果要访问的资源比较复杂,仍要使用临界区或互斥。
可等待定时器
可等待定时器是在某个时间或按规定的间隔时间发出自己的信号通知的内核对象。它们通常用来在某个时间执行某个操作。
创建可等待定时器
| HANDLE CreateWaitableTimer( PSECURITY_ATTRISUTES psa, BOOL fManualReset,//人工重置或自动重置定时器 PCTSTR pszName); |
设置可等待定时器
可等待定时器对象在非激活状态下被创建,程序员应调用 SetWaitableTimer函数来界定定时器在何时被激活:
| BOOL SetWaitableTimer( HANDLE hTimer, //要设置的定时器 const LARGE_INTEGER *pDueTime, //指明定时器第一次激活的时间 LONG lPeriod, //指明此后定时器应该间隔多长时间激活一次 PTIMERAPCROUTINE pfnCompletionRoutine, PVOID PvArgToCompletionRoutine, BOOL fResume); |
取消可等待定时器
| BOOl Cancel WaitableTimer( HANDLE hTimer //要取消的定时器 ); |
打开可等待定时器
作为一种内核对象,WaitableTimer也可以被其他进程以名字打开:
| HANDLE OpenWaitableTimer ( DWORD fdwAccess, BOOL bInherithandle, PCTSTR pszName ); |
实例
下面给出的一个程序可能发生死锁现象:
| #include <windows.h> #include <stdio.h> CRITICAL_SECTION cs1, cs2; long WINAPI ThreadFn(long); main() { long iThreadID; InitializeCriticalSection(&cs1); InitializeCriticalSection(&cs2); CloseHandle(CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)ThreadFn, NULL, 0,&iThreadID)); while (TRUE) { EnterCriticalSection(&cs1); printf("\n线程1占用临界区1"); EnterCriticalSection(&cs2); printf("\n线程1占用临界区2"); printf("\n线程1占用两个临界区"); LeaveCriticalSection(&cs2); LeaveCriticalSection(&cs1); printf("\n线程1释放两个临界区"); Sleep(20); }; return (0); } long WINAPI ThreadFn(long lParam) { while (TRUE) { EnterCriticalSection(&cs2); printf("\n线程2占用临界区2"); EnterCriticalSection(&cs1); printf("\n线程2占用临界区1"); printf("\n线程2占用两个临界区"); LeaveCriticalSection(&cs1); LeaveCriticalSection(&cs2); printf("\n线程2释放两个临界区"); Sleep(20); }; } |
运行这个程序,在中途一旦发生这样的输出:
线程1占用临界区1
线程2占用临界区2
或
线程2占用临界区2
线程1占用临界区1
或
线程1占用临界区2
线程2占用临界区1
或
线程2占用临界区1
线程1占用临界区2
程序就"死"掉了,再也运行不下去。因为这样的输出,意味着两个线程相互等待对方释放临界区,也即出现了死锁。
如果我们将线程2的控制函数改为:
| long WINAPI ThreadFn(long lParam) { while (TRUE) { EnterCriticalSection(&cs1); printf("\n线程2占用临界区1"); EnterCriticalSection(&cs2); printf("\n线程2占用临界区2"); printf("\n线程2占用两个临界区"); LeaveCriticalSection(&cs1); LeaveCriticalSection(&cs2); printf("\n线程2释放两个临界区"); Sleep(20); }; } |
再次运行程序,死锁被消除,程序不再挡掉。这是因为我们改变了线程2中获得临界区1、2的顺序,消除了线程1、2相互等待资源的可能性。
由此我们得出结论,在使用线程间的同步机制时,要特别留心死锁的发生。
四.深入浅出Win32多线程程序设计之综合实例
本章我们将以工业控制和嵌入式系统中运用极为广泛的串口通信为例讲述多线程的典型应用。
而网络通信也是多线程应用最广泛的领域之一,所以本章的最后一节也将对多线程网络通信进行简短的描述。
1.串口通信
在工业控制系统中,工控机(一般都基于PC Windows平台)经常需要与单片机通过串口进行通信。因此,操作和使用PC的串口成为大多数单片机、嵌入式系统领域工程师必须具备的能力。
串口的使用需要通过三个步骤来完成的:
(1) 打开通信端口;
(2) 初始化串口,设置波特率、数据位、停止位、奇偶校验等参数。为了给读者一个直观的印象,下图从Windows的"控制面板->系统->设备管理器->通信端口(COM1)"打开COM的设置窗口:
(3) 读写串口。
在WIN32平台下,对通信端口进行操作跟基本的文件操作一样。
创建/打开COM资源
下列函数如果调用成功,则返回一个标识通信端口的句柄,否则返回-1:
获得/设置COM属性
下列函数可以获得COM口的设备控制块,从而获得相关参数:
如果要调整通信端口的参数,则需要重新配置设备控制块,再用WIN32 API SetCommState()函数进行设置:
DCB结构包含了串口的各项参数设置,如下:
读写串口
在读写串口之前,还要用PurgeComm()函数清空缓冲区,并用SetCommMask ()函数设置事件掩模来监视指定通信端口上的事件,其原型为:
串口上可能发生的事件如下表所示:
在设置好事件掩模后,我们就可以利用WaitCommEvent()函数来等待串口上发生事件,其函数原型为:
我们可以在发生事件后,根据相应的事件类型,进行串口的读写操作:
2.工程实例
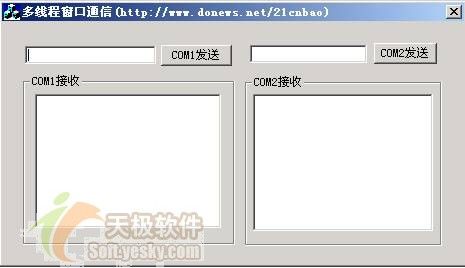
下面我们用第1节所述API实现一个多线程的串口通信程序。这个例子工程(工程名为MultiThreadCom)的界面很简单,如下图所示:
它是一个多线程的应用程序,包括两个工作者线程,分别处理串口1和串口2。为了简化问题,我们让连接两个串口的电缆只包含RX、TX两根连线(即不以硬件控制RS-232,串口上只会发生EV_TXEMPTY、EV_RXCHAR事件)。
在工程实例的BOOL CMultiThreadComApp::InitInstance()函数中,启动并设置COM1和COM2,其源代码为:
此后我们在对话框CMultiThreadComDlg的初始化函数OnInitDialog中启动两个分别处理COM1和COM2的线程:
两个串口COM1和COM2对应的线程处理函数等待串口上发生事件,并根据事件类型和自身缓冲区是否有数据要发送进行相应的处理,其源代码为:
线程控制函数中所操作的com1Data和com2Data是与串口对应的数据结构struct tagSerialPort的实例,这个数据结构是:
而网络通信也是多线程应用最广泛的领域之一,所以本章的最后一节也将对多线程网络通信进行简短的描述。
1.串口通信
在工业控制系统中,工控机(一般都基于PC Windows平台)经常需要与单片机通过串口进行通信。因此,操作和使用PC的串口成为大多数单片机、嵌入式系统领域工程师必须具备的能力。
串口的使用需要通过三个步骤来完成的:
(1) 打开通信端口;
(2) 初始化串口,设置波特率、数据位、停止位、奇偶校验等参数。为了给读者一个直观的印象,下图从Windows的"控制面板->系统->设备管理器->通信端口(COM1)"打开COM的设置窗口:

(3) 读写串口。
在WIN32平台下,对通信端口进行操作跟基本的文件操作一样。
创建/打开COM资源
下列函数如果调用成功,则返回一个标识通信端口的句柄,否则返回-1:
| HADLE CreateFile(PCTSTR lpFileName, //通信端口名,如"COM1" WORD dwDesiredAccess, //对资源的访问类型 WORD dwShareMode, //指定共享模式,COM不能共享,该参数为0 PSECURITY_ATTRIBUTES lpSecurityAttributes, //安全描述符指针,可为NULL WORD dwCreationDisposition, //创建方式 WORD dwFlagsAndAttributes, //文件属性,可为NULL HANDLE hTemplateFile //模板文件句柄,置为NULL ); |
获得/设置COM属性
下列函数可以获得COM口的设备控制块,从而获得相关参数:
| BOOL WINAPI GetCommState( HANDLE hFile, //标识通信端口的句柄 LPDCB lpDCB //指向一个设备控制块(DCB结构)的指针 ); |
如果要调整通信端口的参数,则需要重新配置设备控制块,再用WIN32 API SetCommState()函数进行设置:
| BOOL SetCommState( HANDLE hFile, //标识通信端口的句柄 LPDCB lpDCB //指向一个设备控制块(DCB结构)的指针 ); |
DCB结构包含了串口的各项参数设置,如下:
| typedef struct _DCB { // dcb DWORD DCBlength; // sizeof(DCB) DWORD BaudRate; // current baud rate DWORD fBinary: 1; // binary mode, no EOF check DWORD fParity: 1; // enable parity checking DWORD fOutxCtsFlow: 1; // CTS output flow control DWORD fOutxDsrFlow: 1; // DSR output flow control DWORD fDtrControl: 2; // DTR flow control type DWORD fDsrSensitivity: 1; // DSR sensitivity DWORD fTXContinueOnXoff: 1; // XOFF continues Tx DWORD fOutX: 1; // XON/XOFF out flow control DWORD fInX: 1; // XON/XOFF in flow control DWORD fErrorChar: 1; // enable error replacement DWORD fNull: 1; // enable null stripping DWORD fRtsControl: 2; // RTS flow control DWORD fAbortOnError: 1; // abort reads/writes on error DWORD fDummy2: 17; // reserved WORD wReserved; // not currently used WORD XonLim; // transmit XON threshold WORD XoffLim; // transmit XOFF threshold BYTE ByteSize; // number of bits/byte, 4-8 BYTE Parity; // 0-4=no,odd,even,mark,space BYTE StopBits; // 0,1,2 = 1, 1.5, 2 char XonChar; // Tx and Rx XON character char XoffChar; // Tx and Rx XOFF character char ErrorChar; // error replacement character char EofChar; // end of input character char EvtChar; // received event character WORD wReserved1; // reserved; do not use } DCB; |
读写串口
在读写串口之前,还要用PurgeComm()函数清空缓冲区,并用SetCommMask ()函数设置事件掩模来监视指定通信端口上的事件,其原型为:
| BOOL SetCommMask( HANDLE hFile, //标识通信端口的句柄 DWORD dwEvtMask //能够使能的通信事件 ); |
串口上可能发生的事件如下表所示:
| 值 | 事件描述 |
| EV_BREAK | A break was detected on input. |
| EV_CTS | The CTS (clear-to-send) signal changed state. |
| EV_DSR | The DSR(data-set-ready) signal changed state. |
| EV_ERR | A line-status error occurred. Line-status errors are CE_FRAME, CE_OVERRUN, and CE_RXPARITY. |
| EV_RING | A ring indicator was detected. |
| EV_RLSD | The RLSD (receive-line-signal-detect) signal changed state. |
| EV_RXCHAR | A character was received and placed in the input buffer. |
| EV_RXFLAG | The event character was received and placed in the input buffer. The event character is specified in the device's DCB structure, which is applied to a serial port by using the SetCommState function. |
| EV_TXEMPTY | The last character in the output buffer was sent. |
在设置好事件掩模后,我们就可以利用WaitCommEvent()函数来等待串口上发生事件,其函数原型为:
| BOOL WaitCommEvent( HANDLE hFile, //标识通信端口的句柄 LPDWORD lpEvtMask, //指向存放事件标识变量的指针 LPOVERLAPPED lpOverlapped, // 指向overlapped结构 ); |
我们可以在发生事件后,根据相应的事件类型,进行串口的读写操作:
| BOOL ReadFile(HANDLE hFile, //标识通信端口的句柄 LPVOID lpBuffer, //输入数据Buffer指针 DWORD nNumberOfBytesToRead, // 需要读取的字节数 LPDWORD lpNumberOfBytesRead, //实际读取的字节数指针 LPOVERLAPPED lpOverlapped //指向overlapped结构 ); BOOL WriteFile(HANDLE hFile, //标识通信端口的句柄 LPCVOID lpBuffer, //输出数据Buffer指针 DWORD nNumberOfBytesToWrite, //需要写的字节数 LPDWORD lpNumberOfBytesWritten, //实际写入的字节数指针 LPOVERLAPPED lpOverlapped //指向overlapped结构 ); |
2.工程实例
下面我们用第1节所述API实现一个多线程的串口通信程序。这个例子工程(工程名为MultiThreadCom)的界面很简单,如下图所示:
|
它是一个多线程的应用程序,包括两个工作者线程,分别处理串口1和串口2。为了简化问题,我们让连接两个串口的电缆只包含RX、TX两根连线(即不以硬件控制RS-232,串口上只会发生EV_TXEMPTY、EV_RXCHAR事件)。
在工程实例的BOOL CMultiThreadComApp::InitInstance()函数中,启动并设置COM1和COM2,其源代码为:
| BOOL CMultiThreadComApp::InitInstance() { AfxEnableControlContainer(); //打开并设置COM1 hComm1=CreateFile("COM1", GENERIC_READ|GENERIC_WRITE, 0, NULL ,OPEN_EXISTING, 0,NULL); if (hComm1==(HANDLE)-1) { AfxMessageBox("打开COM1失败"); return false; } else { DCB wdcb; GetCommState (hComm1,&wdcb); wdcb.BaudRate=9600; SetCommState (hComm1,&wdcb); PurgeComm(hComm1,PURGE_TXCLEAR); } //打开并设置COM2 hComm2=CreateFile("COM2", GENERIC_READ|GENERIC_WRITE, 0, NULL ,OPEN_EXISTING, 0,NULL); if (hComm2==(HANDLE)-1) { AfxMessageBox("打开COM2失败"); return false; } else { DCB wdcb; GetCommState (hComm2,&wdcb); wdcb.BaudRate=9600; SetCommState (hComm2,&wdcb); PurgeComm(hComm2,PURGE_TXCLEAR); } CMultiThreadComDlg dlg; m_pMainWnd = &dlg; int nResponse = dlg.DoModal(); if (nResponse == IDOK) { // TODO: Place code here to handle when the dialog is // dismissed with OK } else if (nResponse == IDCANCEL) { // TODO: Place code here to handle when the dialog is // dismissed with Cancel } return FALSE; } |
此后我们在对话框CMultiThreadComDlg的初始化函数OnInitDialog中启动两个分别处理COM1和COM2的线程:
| BOOL CMultiThreadComDlg::OnInitDialog() { CDialog::OnInitDialog(); // Add "About..." menu item to system menu. // IDM_ABOUTBOX must be in the system command range. ASSERT((IDM_ABOUTBOX & 0xFFF0) == IDM_ABOUTBOX); ASSERT(IDM_ABOUTBOX < 0xF000); CMenu* pSysMenu = GetSystemMenu(FALSE); if (pSysMenu != NULL) { CString strAboutMenu; strAboutMenu.LoadString(IDS_ABOUTBOX); if (!strAboutMenu.IsEmpty()) { pSysMenu->AppendMenu(MF_SEPARATOR); pSysMenu->AppendMenu(MF_STRING, IDM_ABOUTBOX, strAboutMenu); } } // Set the icon for this dialog. The framework does this automatically // when the application's main window is not a dialog SetIcon(m_hIcon, TRUE); // Set big icon SetIcon(m_hIcon, FALSE); // Set small icon // TODO: Add extra initialization here //启动串口1处理线程 DWORD nThreadId1; hCommThread1 = ::CreateThread((LPSECURITY_ATTRIBUTES)NULL, 0, (LPTHREAD_START_ROUTINE)Com1ThreadProcess, AfxGetMainWnd()->m_hWnd, 0, &nThreadId1); if (hCommThread1 == NULL) { AfxMessageBox("创建串口1处理线程失败"); return false; } //启动串口2处理线程 DWORD nThreadId2; hCommThread2 = ::CreateThread((LPSECURITY_ATTRIBUTES)NULL, 0, (LPTHREAD_START_ROUTINE)Com2ThreadProcess, AfxGetMainWnd()->m_hWnd, 0, &nThreadId2); if (hCommThread2 == NULL) { AfxMessageBox("创建串口2处理线程失败"); return false; } return TRUE; // return TRUE unless you set the focus to a control } |
两个串口COM1和COM2对应的线程处理函数等待串口上发生事件,并根据事件类型和自身缓冲区是否有数据要发送进行相应的处理,其源代码为:
| DWORD WINAPI Com1ThreadProcess(HWND hWnd//主窗口句柄) { DWORD wEven; char str[10]; //读入数据 SetCommMask(hComm1, EV_RXCHAR | EV_TXEMPTY); while (TRUE) { WaitCommEvent(hComm1, &wEven, NULL); if(wEven = 0) { CloseHandle(hCommThread1); hCommThread1 = NULL; ExitThread(0); } else { switch (wEven) { case EV_TXEMPTY: if (wTxPos < wTxLen) { //在串口1写入数据 DWORD wCount; //写入的字节数 WriteFile(hComm1, com1Data.TxBuf[wTxPos], 1, &wCount, NULL); com1Data.wTxPos++; } break; case EV_RXCHAR: if (com1Data.wRxPos < com1Data.wRxLen) { //读取串口数据, 处理收到的数据 DWORD wCount; //读取的字节数 ReadFile(hComm1, com1Data.RxBuf[wRxPos], 1, &wCount, NULL); com1Data.wRxPos++; if(com1Data.wRxPos== com1Data.wRxLen); ::PostMessage(hWnd, COM_SENDCHAR, 0, 1); } break; } } } } return TRUE; } DWORD WINAPI Com2ThreadProcess(HWND hWnd //主窗口句柄) { DWORD wEven; char str[10]; //读入数据 SetCommMask(hComm2, EV_RXCHAR | EV_TXEMPTY); while (TRUE) { WaitCommEvent(hComm2, &wEven, NULL); if (wEven = 0) { CloseHandle(hCommThread2); hCommThread2 = NULL; ExitThread(0); } else { switch (wEven) { case EV_TXEMPTY: if (wTxPos < wTxLen) { //在串口2写入数据 DWORD wCount; //写入的字节数 WriteFile(hComm2, com2Data.TxBuf[wTxPos], 1, &wCount, NULL); com2Data.wTxPos++; } break; case EV_RXCHAR: if (com2Data.wRxPos < com2Data.wRxLen) { //读取串口数据, 处理收到的数据 DWORD wCount; //读取的字节数 ReadFile(hComm2, com2Data.RxBuf[wRxPos], 1, &wCount, NULL); com2Data.wRxPos++; if(com2Data.wRxPos== com2Data.wRxLen); ::PostMessage(hWnd, COM_SENDCHAR, 0, 1); } break; } } } return TRUE; } |
线程控制函数中所操作的com1Data和com2Data是与串口对应的数据结构struct tagSerialPort的实例,这个数据结构是:
| typedef struct tagSerialPort { BYTE RxBuf[SPRX_BUFLEN];//接收Buffer WORD wRxPos; //当前接收字节位置 WORD wRxLen; //要接收的字节数 BYTE TxBuf[SPTX_BUFLEN];//发送Buffer WORD wTxPos; //当前发送字节位置 WORD wTxLen; //要发送的字节数 }SerialPort, * LPSerialPort; |
3.多线程串口类
使用多线程串口通信更方便的途径是编写一个多线程的串口类,例如Remon Spekreijse编写了一个CSerialPort串口类。仔细分析这个类的源代码,将十分有助于我们对先前所学多线程及同步知识的理解。
3.1类的定义
3.2类的实现
3.2.1构造函数与析构函数
进行相关变量的赋初值及内存恢复:
3.2.2核心函数:初始化串口
在初始化串口函数中,将打开串口,设置相关参数,并创建串口相关的用户控制事件,初始化临界区(Critical Section),以成队的EnterCriticalSection()、LeaveCriticalSection()函数进行资源的排它性访问:
使用多线程串口通信更方便的途径是编写一个多线程的串口类,例如Remon Spekreijse编写了一个CSerialPort串口类。仔细分析这个类的源代码,将十分有助于我们对先前所学多线程及同步知识的理解。
3.1类的定义
| #ifndef __SERIALPORT_H__ #define __SERIALPORT_H__ #define WM_COMM_BREAK_DETECTED WM_USER+1 // A break was detected on input. #define WM_COMM_CTS_DETECTED WM_USER+2 // The CTS (clear-to-send) signal changed state. #define WM_COMM_DSR_DETECTED WM_USER+3 // The DSR (data-set-ready) signal changed state. #define WM_COMM_ERR_DETECTED WM_USER+4 // A line-status error occurred. Line-status errors are CE_FRAME, CE_OVERRUN, and CE_RXPARITY. #define WM_COMM_RING_DETECTED WM_USER+5 // A ring indicator was detected. #define WM_COMM_RLSD_DETECTED WM_USER+6 // The RLSD (receive-line-signal-detect) signal changed state. #define WM_COMM_RXCHAR WM_USER+7 // A character was received and placed in the input buffer. #define WM_COMM_RXFLAG_DETECTED WM_USER+8 // The event character was received and placed in the input buffer. #define WM_COMM_TXEMPTY_DETECTED WM_USER+9 // The last character in the output buffer was sent. class CSerialPort { public: // contruction and destruction CSerialPort(); virtual ~CSerialPort(); // port initialisation BOOL InitPort(CWnd* pPortOwner, UINT portnr = 1, UINT baud = 19200, char parity = 'N', UINT databits = 8, UINT stopsbits = 1, DWORD dwCommEvents = EV_RXCHAR | EV_CTS, UINT nBufferSize = 512); // start/stop comm watching BOOL StartMonitoring(); BOOL RestartMonitoring(); BOOL StopMonitoring(); DWORD GetWriteBufferSize(); DWORD GetCommEvents(); DCB GetDCB(); void WriteToPort(char* string); protected: // protected memberfunctions void ProcessErrorMessage(char* ErrorText); static UINT CommThread(LPVOID pParam); static void ReceiveChar(CSerialPort* port, COMSTAT comstat); static void WriteChar(CSerialPort* port); // thread CWinThread* m_Thread; // synchronisation objects CRITICAL_SECTION m_csCommunicationSync; BOOL m_bThreadAlive; // handles HANDLE m_hShutdownEvent; HANDLE m_hComm; HANDLE m_hWriteEvent; // Event array. // One element is used for each event. There are two event handles for each port. // A Write event and a receive character event which is located in the overlapped structure (m_ov.hEvent). // There is a general shutdown when the port is closed. HANDLE m_hEventArray[3]; // structures OVERLAPPED m_ov; COMMTIMEOUTS m_CommTimeouts; DCB m_dcb; // owner window CWnd* m_pOwner; // misc UINT m_nPortNr; char* m_szWriteBuffer; DWORD m_dwCommEvents; DWORD m_nWriteBufferSize; }; #endif __SERIALPORT_H__ |
3.2类的实现
3.2.1构造函数与析构函数
进行相关变量的赋初值及内存恢复:
| CSerialPort::CSerialPort() { m_hComm = NULL; // initialize overlapped structure members to zero m_ov.Offset = 0; m_ov.OffsetHigh = 0; // create events m_ov.hEvent = NULL; m_hWriteEvent = NULL; m_hShutdownEvent = NULL; m_szWriteBuffer = NULL; m_bThreadAlive = FALSE; } // // Delete dynamic memory // CSerialPort::~CSerialPort() { do { SetEvent(m_hShutdownEvent); } while (m_bThreadAlive); TRACE("Thread ended\n"); delete []m_szWriteBuffer; } |
3.2.2核心函数:初始化串口
在初始化串口函数中,将打开串口,设置相关参数,并创建串口相关的用户控制事件,初始化临界区(Critical Section),以成队的EnterCriticalSection()、LeaveCriticalSection()函数进行资源的排它性访问:
| BOOL CSerialPort::InitPort(CWnd *pPortOwner, // the owner (CWnd) of the port (receives message) UINT portnr, // portnumber (1..4) UINT baud, // baudrate char parity, // parity UINT databits, // databits UINT stopbits, // stopbits DWORD dwCommEvents, // EV_RXCHAR, EV_CTS etc UINT writebuffersize) // size to the writebuffer { assert(portnr > 0 && portnr < 5); assert(pPortOwner != NULL); // if the thread is alive: Kill if (m_bThreadAlive) { do { SetEvent(m_hShutdownEvent); } while (m_bThreadAlive); TRACE("Thread ended\n"); } // create events if (m_ov.hEvent != NULL) ResetEvent(m_ov.hEvent); m_ov.hEvent = CreateEvent(NULL, TRUE, FALSE, NULL); if (m_hWriteEvent != NULL) ResetEvent(m_hWriteEvent); m_hWriteEvent = CreateEvent(NULL, TRUE, FALSE, NULL); if (m_hShutdownEvent != NULL) ResetEvent(m_hShutdownEvent); m_hShutdownEvent = CreateEvent(NULL, TRUE, FALSE, NULL); // initialize the event objects m_hEventArray[0] = m_hShutdownEvent; // highest priority m_hEventArray[1] = m_ov.hEvent; m_hEventArray[2] = m_hWriteEvent; // initialize critical section InitializeCriticalSection(&m_csCommunicationSync); // set buffersize for writing and save the owner m_pOwner = pPortOwner; if (m_szWriteBuffer != NULL) delete []m_szWriteBuffer; m_szWriteBuffer = new char[writebuffersize]; m_nPortNr = portnr; m_nWriteBufferSize = writebuffersize; m_dwCommEvents = dwCommEvents; BOOL bResult = FALSE; char *szPort = new char[50]; char *szBaud = new char[50]; // now it critical! EnterCriticalSection(&m_csCommunicationSync); // if the port is already opened: close it if (m_hComm != NULL) { CloseHandle(m_hComm); m_hComm = NULL; } // prepare port strings sprintf(szPort, "COM%d", portnr); sprintf(szBaud, "baud=%d parity=%c data=%d stop=%d", baud, parity, databits,stopbits); // get a handle to the port m_hComm = CreateFile(szPort, // communication port string (COMX) GENERIC_READ | GENERIC_WRITE, // read/write types 0, // comm devices must be opened with exclusive access NULL, // no security attributes OPEN_EXISTING, // comm devices must use OPEN_EXISTING FILE_FLAG_OVERLAPPED, // Async I/O 0); // template must be 0 for comm devices if (m_hComm == INVALID_HANDLE_VALUE) { // port not found delete []szPort; delete []szBaud; return FALSE; } // set the timeout values m_CommTimeouts.ReadIntervalTimeout = 1000; m_CommTimeouts.ReadTotalTimeoutMultiplier = 1000; m_CommTimeouts.ReadTotalTimeoutConstant = 1000; m_CommTimeouts.WriteTotalTimeoutMultiplier = 1000; m_CommTimeouts.WriteTotalTimeoutConstant = 1000; // configure if (SetCommTimeouts(m_hComm, &m_CommTimeouts)) { if (SetCommMask(m_hComm, dwCommEvents)) { if (GetCommState(m_hComm, &m_dcb)) { m_dcb.fRtsControl = RTS_CONTROL_ENABLE; // set RTS bit high! if (BuildCommDCB(szBaud, &m_dcb)) { if (SetCommState(m_hComm, &m_dcb)) ; // normal operation... continue else ProcessErrorMessage("SetCommState()"); } else ProcessErrorMessage("BuildCommDCB()"); } else ProcessErrorMessage("GetCommState()"); } else ProcessErrorMessage("SetCommMask()"); } else ProcessErrorMessage("SetCommTimeouts()"); delete []szPort; delete []szBaud; // flush the port PurgeComm(m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); // release critical section LeaveCriticalSection(&m_csCommunicationSync); TRACE("Initialisation for communicationport %d completed.\nUse Startmonitor to communicate.\n", portnr); return TRUE; } |
3.3.3核心函数:串口线程控制函数
串口线程处理函数是整个类中最核心的部分,它主要完成两类工作:
(1)利用WaitCommEvent函数对串口上发生的事件进行获取并根据事件的不同类型进行相应的处理;
(2)利用WaitForMultipleObjects函数对串口相关的用户控制事件进行等待并做相应处理。
下列三个函数用于对串口线程进行启动、挂起和恢复:
3.3.4读写串口
下面一组函数是用户对串口进行读写操作的接口:
串口线程处理函数是整个类中最核心的部分,它主要完成两类工作:
(1)利用WaitCommEvent函数对串口上发生的事件进行获取并根据事件的不同类型进行相应的处理;
(2)利用WaitForMultipleObjects函数对串口相关的用户控制事件进行等待并做相应处理。
| UINT CSerialPort::CommThread(LPVOID pParam) { // Cast the void pointer passed to the thread back to // a pointer of CSerialPort class CSerialPort *port = (CSerialPort*)pParam; // Set the status variable in the dialog class to // TRUE to indicate the thread is running. port->m_bThreadAlive = TRUE; // Misc. variables DWORD BytesTransfered = 0; DWORD Event = 0; DWORD CommEvent = 0; DWORD dwError = 0; COMSTAT comstat; BOOL bResult = TRUE; // Clear comm buffers at startup if (port->m_hComm) // check if the port is opened PurgeComm(port->m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); // begin forever loop. This loop will run as long as the thread is alive. for (;;) { // Make a call to WaitCommEvent(). This call will return immediatly // because our port was created as an async port (FILE_FLAG_OVERLAPPED // and an m_OverlappedStructerlapped structure specified). This call will cause the // m_OverlappedStructerlapped element m_OverlappedStruct.hEvent, which is part of the m_hEventArray to // be placed in a non-signeled state if there are no bytes available to be read, // or to a signeled state if there are bytes available. If this event handle // is set to the non-signeled state, it will be set to signeled when a // character arrives at the port. // we do this for each port! bResult = WaitCommEvent(port->m_hComm, &Event, &port->m_ov); if (!bResult) { // If WaitCommEvent() returns FALSE, process the last error to determin // the reason.. switch (dwError = GetLastError()) { case ERROR_IO_PENDING: { // This is a normal return value if there are no bytes // to read at the port. // Do nothing and continue break; } case 87: { // Under Windows NT, this value is returned for some reason. // I have not investigated why, but it is also a valid reply // Also do nothing and continue. break; } default: { // All other error codes indicate a serious error has // occured. Process this error. port->ProcessErrorMessage("WaitCommEvent()"); break; } } } else { // If WaitCommEvent() returns TRUE, check to be sure there are // actually bytes in the buffer to read. // // If you are reading more than one byte at a time from the buffer // (which this program does not do) you will have the situation occur // where the first byte to arrive will cause the WaitForMultipleObjects() // function to stop waiting. The WaitForMultipleObjects() function // resets the event handle in m_OverlappedStruct.hEvent to the non-signelead state // as it returns. // // If in the time between the reset of this event and the call to // ReadFile() more bytes arrive, the m_OverlappedStruct.hEvent handle will be set again // to the signeled state. When the call to ReadFile() occurs, it will // read all of the bytes from the buffer, and the program will // loop back around to WaitCommEvent(). // // At this point you will be in the situation where m_OverlappedStruct.hEvent is set, // but there are no bytes available to read. If you proceed and call // ReadFile(), it will return immediatly due to the async port setup, but // GetOverlappedResults() will not return until the next character arrives. // // It is not desirable for the GetOverlappedResults() function to be in // this state. The thread shutdown event (event 0) and the WriteFile() // event (Event2) will not work if the thread is blocked by GetOverlappedResults(). // // The solution to this is to check the buffer with a call to ClearCommError(). // This call will reset the event handle, and if there are no bytes to read // we can loop back through WaitCommEvent() again, then proceed. // If there are really bytes to read, do nothing and proceed. bResult = ClearCommError(port->m_hComm, &dwError, &comstat); if (comstat.cbInQue == 0) continue; } // end if bResult // Main wait function. This function will normally block the thread // until one of nine events occur that require action. Event = WaitForMultipleObjects(3, port->m_hEventArray, FALSE, INFINITE); switch (Event) { case 0: { // Shutdown event. This is event zero so it will be // the higest priority and be serviced first. port->m_bThreadAlive = FALSE; // Kill this thread. break is not needed, but makes me feel better. AfxEndThread(100); break; } case 1: // read event { GetCommMask(port->m_hComm, &CommEvent); if (CommEvent &EV_CTS) ::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_CTS_DETECTED, (WPARAM)0, (LPARAM)port->m_nPortNr); if (CommEvent &EV_RXFLAG) ::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_RXFLAG_DETECTED,(WPARAM)0, (LPARAM)port->m_nPortNr); if (CommEvent &EV_BREAK) ::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_BREAK_DETECTED,(WPARAM)0, (LPARAM)port->m_nPortNr); if (CommEvent &EV_ERR) ::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_ERR_DETECTED, (WPARAM)0, (LPARAM)port->m_nPortNr); if (CommEvent &EV_RING) ::SendMessage(port->m_pOwner->m_hWnd, WM_COMM_RING_DETECTED,(WPARAM)0, (LPARAM)port->m_nPortNr); if (CommEvent &EV_RXCHAR) // Receive character event from port. ReceiveChar(port, comstat); break; } case 2: // write event { // Write character event from port WriteChar(port); break; } } // end switch } // close forever loop return 0; } |
下列三个函数用于对串口线程进行启动、挂起和恢复:
| // // start comm watching // BOOL CSerialPort::StartMonitoring() { if (!(m_Thread = AfxBeginThread(CommThread, this))) return FALSE; TRACE("Thread started\n"); return TRUE; } // // Restart the comm thread // BOOL CSerialPort::RestartMonitoring() { TRACE("Thread resumed\n"); m_Thread->ResumeThread(); return TRUE; } // // Suspend the comm thread // BOOL CSerialPort::StopMonitoring() { TRACE("Thread suspended\n"); m_Thread->SuspendThread(); return TRUE; } |
3.3.4读写串口
下面一组函数是用户对串口进行读写操作的接口:
| // // Write a character. // void CSerialPort::WriteChar(CSerialPort *port) { BOOL bWrite = TRUE; BOOL bResult = TRUE; DWORD BytesSent = 0; ResetEvent(port->m_hWriteEvent); // Gain ownership of the critical section EnterCriticalSection(&port->m_csCommunicationSync); if (bWrite) { // Initailize variables port->m_ov.Offset = 0; port->m_ov.OffsetHigh = 0; // Clear buffer PurgeComm(port->m_hComm, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT); bResult = WriteFile(port->m_hComm, // Handle to COMM Port port->m_szWriteBuffer, // Pointer to message buffer in calling finction strlen((char*)port->m_szWriteBuffer), // Length of message to send &BytesSent, // Where to store the number of bytes sent &port->m_ov); // Overlapped structure // deal with any error codes if (!bResult) { DWORD dwError = GetLastError(); switch (dwError) { case ERROR_IO_PENDING: { // continue to GetOverlappedResults() BytesSent = 0; bWrite = FALSE; break; } default: { // all other error codes port->ProcessErrorMessage("WriteFile()"); } } } else { LeaveCriticalSection(&port->m_csCommunicationSync); } } // end if(bWrite) if (!bWrite) { bWrite = TRUE; bResult = GetOverlappedResult(port->m_hComm, // Handle to COMM port &port->m_ov, // Overlapped structure &BytesSent, // Stores number of bytes sent TRUE); // Wait flag LeaveCriticalSection(&port->m_csCommunicationSync); // deal with the error code if (!bResult) { port->ProcessErrorMessage("GetOverlappedResults() in WriteFile()"); } } // end if (!bWrite) // Verify that the data size send equals what we tried to send if (BytesSent != strlen((char*)port->m_szWriteBuffer)) { TRACE("WARNING: WriteFile() error.. Bytes Sent: %d; Message Length: %d\n", BytesSent, strlen((char*)port->m_szWriteBuffer)); } } // // Character received. Inform the owner // void CSerialPort::ReceiveChar(CSerialPort *port, COMSTAT comstat) { BOOL bRead = TRUE; BOOL bResult = TRUE; DWORD dwError = 0; DWORD BytesRead = 0; unsigned char RXBuff; for (;;) { // Gain ownership of the comm port critical section. // This process guarantees no other part of this program // is using the port object. EnterCriticalSection(&port->m_csCommunicationSync); // ClearCommError() will update the COMSTAT structure and // clear any other errors. bResult = ClearCommError(port->m_hComm, &dwError, &comstat); LeaveCriticalSection(&port->m_csCommunicationSync); // start forever loop. I use this type of loop because I // do not know at runtime how many loops this will have to // run. My solution is to start a forever loop and to // break out of it when I have processed all of the // data available. Be careful with this approach and // be sure your loop will exit. // My reasons for this are not as clear in this sample // as it is in my production code, but I have found this // solutiion to be the most efficient way to do this. if (comstat.cbInQue == 0) { // break out when all bytes have been read break; } EnterCriticalSection(&port->m_csCommunicationSync); if (bRead) { bResult = ReadFile(port->m_hComm, // Handle to COMM port &RXBuff, // RX Buffer Pointer 1, // Read one byte &BytesRead, // Stores number of bytes read &port->m_ov); // pointer to the m_ov structure // deal with the error code if (!bResult) { switch (dwError = GetLastError()) { case ERROR_IO_PENDING: { // asynchronous i/o is still in progress // Proceed on to GetOverlappedResults(); bRead = FALSE; break; } default: { // Another error has occured. Process this error. port->ProcessErrorMessage("ReadFile()"); break; } } } else { // ReadFile() returned complete. It is not necessary to call GetOverlappedResults() bRead = TRUE; } } // close if (bRead) if (!bRead) { bRead = TRUE; bResult = GetOverlappedResult(port->m_hComm, // Handle to COMM port &port->m_ov, // Overlapped structure &BytesRead, // Stores number of bytes read TRUE); // Wait flag // deal with the error code if (!bResult) { port->ProcessErrorMessage("GetOverlappedResults() in ReadFile()"); } } // close if (!bRead) LeaveCriticalSection(&port->m_csCommunicationSync); // notify parent that a byte was received ::SendMessage((port->m_pOwner)->m_hWnd, WM_COMM_RXCHAR, (WPARAM)RXBuff,(LPARAM)port->m_nPortNr); } // end forever loop } // // Write a string to the port // void CSerialPort::WriteToPort(char *string) { assert(m_hComm != 0); memset(m_szWriteBuffer, 0, sizeof(m_szWriteBuffer)); strcpy(m_szWriteBuffer, string); // set event for write SetEvent(m_hWriteEvent); } // // Return the output buffer size // DWORD CSerialPort::GetWriteBufferSize() { return m_nWriteBufferSize; } |
3.3.5控制接口
应用程序员使用下列一组public函数可以获取串口的DCB及串口上发生的事件:
3.3.6错误处理
仔细分析Remon Spekreijse的CSerialPort类对我们理解多线程及其同步机制是大有益处的,从http: //codeguru.earthweb.com/network/serialport.shtml我们可以获取CSerialPort类的介绍与工程实例。另外,电子工业出版社《Visual C++/Turbo C串口通信编程实践》一书的作者龚建伟也编写了一个使用CSerialPort类的例子,可以从http: //www.gjwtech.com/scomm/sc2serialportclass.htm获得详情。
4.多线程网络通信
在网络通信中使用多线程主要有两种途径,即主监控线程和线程池。
4.1主监控线程
这种方式指的是程序中使用一个主线程监控某特定端口,一旦在这个端口上发生连接请求,则主监控线程动态使用CreateThread派生出新的子线程处理该请求。主线程在派生子线程后不再对子线程加以控制和调度,而由子线程独自和客户方发生连接并处理异常。
使用这种方法的优点是:
(1)可以较快地实现原型设计,尤其在用户数目较少、连接保持时间较长时有表现较好;
(2)主线程不与子线程发生通信,在一定程度上减少了系统资源的消耗。
其缺点是:
(1)生成和终止子线程的开销比较大;
(2)对远端用户的控制较弱。
这种多线程方式总的特点是"动态生成,静态调度"。
4.2线程池
这种方式指的是主线程在初始化时静态地生成一定数量的悬挂子线程,放置于线程池中。随后,主线程将对这些悬挂子线程进行动态调度。一旦客户发出连接请求,主线程将从线程池中查找一个悬挂的子线程:
(1)如果找到,主线程将该连接分配给这个被发现的子线程。子线程从主线程处接管该连接,并与用户通信。当连接结束时,该子线程将自动悬挂,并进人线程池等待再次被调度;
(2)如果当前已没有可用的子线程,主线程将通告发起连接的客户。
使用这种方法进行设计的优点是:
(1)主线程可以更好地对派生的子线程进行控制和调度;
(2)对远程用户的监控和管理能力较强。
虽然主线程对子线程的调度要消耗一定的资源,但是与主监控线程方式中派生和终止线程所要耗费的资源相比,要少很多。因此,使用该种方法设计和实现的系统在客户端连接和终止变更频繁时有上佳表现。
这种多线程方式总的特点是"静态生成,动态调度"。
应用程序员使用下列一组public函数可以获取串口的DCB及串口上发生的事件:
| // // Return the device control block // DCB CSerialPort::GetDCB() { return m_dcb; } // // Return the communication event masks // DWORD CSerialPort::GetCommEvents() { return m_dwCommEvents; } |
3.3.6错误处理
| // // If there is a error, give the right message // void CSerialPort::ProcessErrorMessage(char *ErrorText) { char *Temp = new char[200]; LPVOID lpMsgBuf; FormatMessage(FORMAT_MESSAGE_ALLOCATE_BUFFER | FORMAT_MESSAGE_FROM_SYSTEM, NULL, GetLastError(), MAKELANGID(LANG_NEUTRAL, SUBLANG_DEFAULT), // Default language (LPTSTR) &lpMsgBuf, 0, NULL); sprintf(Temp, "WARNING: %s Failed with the following error: \n%s\nPort: %d\n", (char*) ErrorText, lpMsgBuf, m_nPortNr); MessageBox(NULL, Temp, "Application Error", MB_ICONSTOP); LocalFree(lpMsgBuf); delete []Temp; } |
仔细分析Remon Spekreijse的CSerialPort类对我们理解多线程及其同步机制是大有益处的,从http: //codeguru.earthweb.com/network/serialport.shtml我们可以获取CSerialPort类的介绍与工程实例。另外,电子工业出版社《Visual C++/Turbo C串口通信编程实践》一书的作者龚建伟也编写了一个使用CSerialPort类的例子,可以从http: //www.gjwtech.com/scomm/sc2serialportclass.htm获得详情。
4.多线程网络通信
在网络通信中使用多线程主要有两种途径,即主监控线程和线程池。
4.1主监控线程
这种方式指的是程序中使用一个主线程监控某特定端口,一旦在这个端口上发生连接请求,则主监控线程动态使用CreateThread派生出新的子线程处理该请求。主线程在派生子线程后不再对子线程加以控制和调度,而由子线程独自和客户方发生连接并处理异常。
使用这种方法的优点是:
(1)可以较快地实现原型设计,尤其在用户数目较少、连接保持时间较长时有表现较好;
(2)主线程不与子线程发生通信,在一定程度上减少了系统资源的消耗。
其缺点是:
(1)生成和终止子线程的开销比较大;
(2)对远端用户的控制较弱。
这种多线程方式总的特点是"动态生成,静态调度"。
4.2线程池
这种方式指的是主线程在初始化时静态地生成一定数量的悬挂子线程,放置于线程池中。随后,主线程将对这些悬挂子线程进行动态调度。一旦客户发出连接请求,主线程将从线程池中查找一个悬挂的子线程:
(1)如果找到,主线程将该连接分配给这个被发现的子线程。子线程从主线程处接管该连接,并与用户通信。当连接结束时,该子线程将自动悬挂,并进人线程池等待再次被调度;
(2)如果当前已没有可用的子线程,主线程将通告发起连接的客户。
使用这种方法进行设计的优点是:
(1)主线程可以更好地对派生的子线程进行控制和调度;
(2)对远程用户的监控和管理能力较强。
虽然主线程对子线程的调度要消耗一定的资源,但是与主监控线程方式中派生和终止线程所要耗费的资源相比,要少很多。因此,使用该种方法设计和实现的系统在客户端连接和终止变更频繁时有上佳表现。
这种多线程方式总的特点是"静态生成,动态调度"。