Linux设备驱动子系统第一弹 - I2C
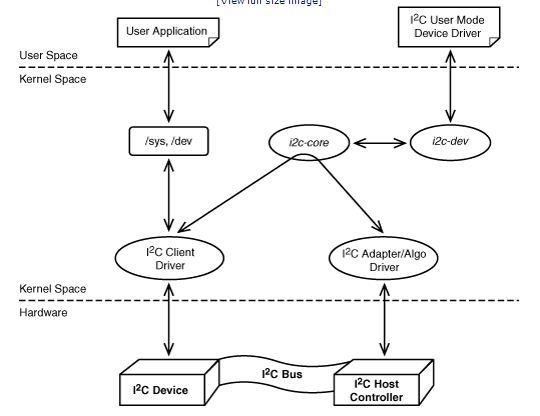
1. Overview
2. Data Structure
3. Adapter
4. I2C-core
5. Slave Device
1. Overview
1.1 Definition
- I2C Inter-Integrated Circuit
- SMBUS System Management Bus, the I2C subset
1.2 Characteristics
- The amount of data exchanged is small.
- The required data transfer rate is low.
1.3 Speed
- Fast speed 400 kbps
- Full speed 100 kbps
1.4 Topology
2 Data Structure
理解数据结构对理解整个驱动程序子系统是很重要的。I2C的主要有两大数据结构,struct i2c_client 和 struct i2c_adapter。
2.1 i2c_client
struct i2c_client {
unsigned short flags; /* div., see below */
unsigned short addr; /* chip address */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter; /* the adapter we sit on */
struct i2c_driver *driver; /* and our access routines */
struct device dev; /* the device structure */
int irq; /* irq issued by device (or -1) */
char driver_name[KOBJ_NAME_LEN];
struct list_head list; /* DEPRECATED */
struct completion released;
};
struct i2c_client代表一个挂载到i2c总线上的i2c从设备,该设备所需要的数据结构,其中包括
- 该i2c从设备所依附的i2c主设备 struct i2c_adapter *adapter
- 该i2c从设备的驱动程序struct i2c_driver *driver
- 作为i2c从设备所通用的成员变量,比如addr, name等
- 该i2c从设备驱动所特有的数据,依附于dev->driver_data下
2.2 i2c_adapter
struct i2c_adapter {
struct module *owner;
unsigned int id;
unsigned int class;
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
... ...
};
struct i2c_adapter代表主芯片所支持的一个i2c主设备,该设备所需要的数据结构,
其中,struct i2c_algorithm *algo是该i2c主设备传输数据的一种算法,或者说是在i2c总线上完成主从设备间数据通信的一种能力。
struct i2c_algorithm {
int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs, int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data * data);
u32 (*functionality) (struct i2c_adapter *);
};
接下来,要实现整个i2c子系统的驱动,便围绕这两个数据结构展开,其主要步骤可总结为以下三步,
- 实现i2c主设备驱动 (drivers/i2c/bus/*)
- 注册i2c从设备的i2c_client (drivers/i2c/i2c-core)
- 实现i2c从设备驱动
3 Adapter
内核目录drivers/i2c下有两个文件夹,algorithm和bus,其中bus存放i2c主设备的驱动,主设备驱动完成两大任务,
- 提供该i2c主设备与从设备间完成数据通信的能力
- 完成该i2c_adapter和所有已知的i2c_client的注册
以i2c-pxa.c为例,
/* drivers/i2c/bus/i2c-pxa.c */
static int __init i2c_adap_pxa_init(void)
{
return platform_driver_register(&i2c_pxa_driver);
}
static struct platform_driver i2c_pxa_driver = {
.probe = i2c_pxa_probe,
... ...
.id_table = i2c_pxa_id_table,
};
static int i2c_pxa_probe(struct platform_device *dev)
{
struct pxa_i2c *i2c;
i2c->adap.algo = i2c_pxa_algorithm; // 提供该i2c主设备与从设备间完成数据通信的能力
i2c_add_numbered_adapter(&i2c->adap); // 调用i2c-core.c中的接口函数,完成该i2c_adapter和i2c_client的注册
... ...
}
static const struct i2c_algorithm i2c_pxa_algorithm = {
.master_xfer = i2c_pxa_xfer, // 根据pxa具体芯片的要求,完成i2c数据传输
.functionality = i2c_pxa_functionality,
};
4 I2C-core
内核目录drivers/i2c下的i2c-core.c,顾名思义,是内核为I2C提供的统一系统接口。
看看i2c_add_numbered_adapter做了些什么,
int i2c_add_numbered_adapter(struct i2c_adapter *adap)
{
... ...
status = i2c_register_adapter(adap);
return status;
}
static int i2c_register_adapter(struct i2c_adapter *adap)
{
... ...
device_register(&adap->dev); //完成I2C主设备adapter的注册,即注册object和发送uevent等
i2c_scan_static_board_info(adap);
... ...
}
i2c_scan_static_board_info(adap),此函数为整个I2C子系统的核心,它会去遍历一个由I2C从设备组成的双向循环链表,并完成所有I2C从设备的i2c_client的注册,具体过程如下,
static void i2c_scan_static_board_info(struct i2c_adapter *adapter)
{
struct i2c_devinfo *devinfo; //已经建立好了的I2C从设备链表
list_for_each_entry(devinfo, &__i2c_board_list, list) {
i2c_new_device(adapter,&devinfo->board_info);
... ...
}
}
struct i2c_client *i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info)
{
... ...
i2c_attach_client(client);
... ...
}
int i2c_attach_client(struct i2c_client *client)
{
... ...
device_register(&client->dev); //完成I2C从设备client的注册
... ...
}
那么,这个I2C从设备组成的双向循环链表,是什么时候通过什么方式建立起来的呢?
以某重力感应设备为例,
/* /arch/arm/mach-pxa/starwood_p1.c */
static void __init saar_init(void)
{
... ...
i2c_register_board_info(0, ARRAY_AND_SIZE(saar_i2c_bma220_info));
... ...
}
static struct i2c_board_info saar_i2c_bma220_info[] = {
{
.driver_name = "bma220",
.addr = 0x0B,
.irq = IRQ_GPIO(mfp_to_gpio(MFP_PIN_GPIO15)),
},
};
/* drivers/i2c/i2c-boardinfo.c */
int __init i2c_register_board_info(int busnum, struct i2c_board_info const *info, unsigned len)
{
... ...
struct i2c_devinfo *devinfo;
devinfo->board_info = *info;
list_add_tail(&devinfo->list, &__i2c_board_list); //将I2C从设备加入该链表中
... ...
}
所以,在系统初始化的过程中,我们可以通过 i2c_register_board_info,将所需要的I2C从设备加入一个名为__i2c_board_list双向循环链表,系统在成功加载I2C主设备adapt后,就会对这张链表里所有I2C从设备逐一地完成 i2c_client的注册。
5 Slave Driver
如果说硬件方面,I2C主设备已经集成在主芯片内,软件方面,linux也为我们提供了相应的驱动程序,位于drivers/i2c/bus下,那么接下来I2C从设备驱动就变得容易得多。既然系统加载I2C主设备驱动时已经注册了i2c_adapter和i2c_client,那么I2C从设备主要完成三大任务,
- 系统初始化时添加以i2c_board_info为结构的I2C从设备的信息
- 在I2C从设备驱动程序里使用i2c_adapter里所提供的算法,即实现I2C通信。
- 将I2C从设备的特有数据结构挂在到i2c_client.dev->driver_data下。
以重力感应装置为例,
static int __init BMA220_init(void)
{
return i2c_add_driver(&bma220_driver);
}
static struct i2c_driver bma220_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "bma220",
},
.class = I2C_CLASS_HWMON,
.probe = bma220_probe,
.remove = bma220_remove,
};
static int bma220_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
struct bma220_data *data;
i2c_check_functionality(client->adapter, I2C_FUNC_I2C)
i2c_smbus_read_word_data(client, 0x00); // i2c-core提供的接口,利用i2c_adapter的算法实现I2C通信
i2c_set_clientdata(bma220_client, data); // 将设备的数据结构挂到i2c_client.dev->driver_data下
misc_register(&bma_device);
request_irq(client->irq, bma220_irq_handler, IRQF_TRIGGER_RISING, "bma220", &data->bma220);
bma220_set_en_tt_xyz(0);
bma220_reset_int();
... ...
}
原文地址:http://blog.csdn.net/qianjin0703/article/details/5894869