Linux shedule 的发展历史.
慢慢来吧~~
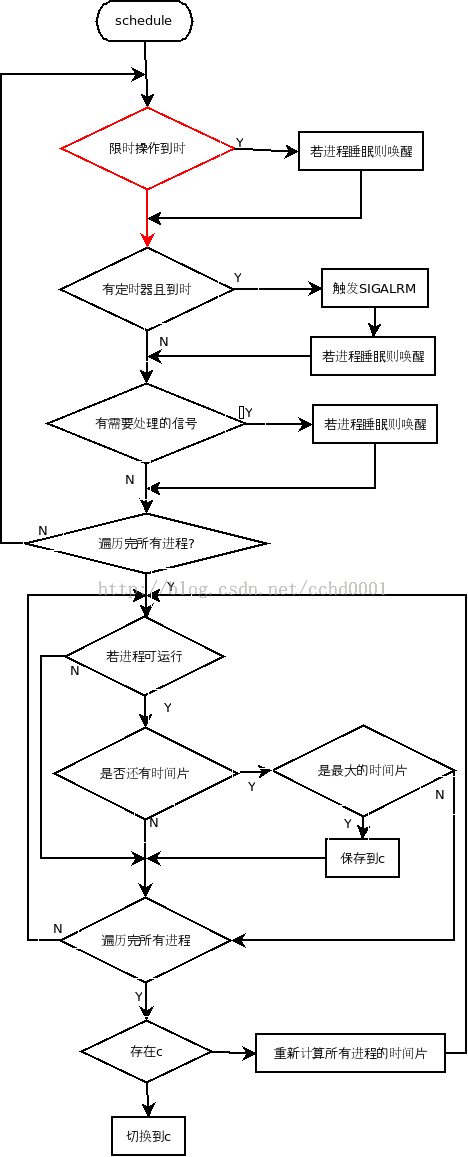
Linux V0.11
支持定时器和信号
流程图:
源码:
void schedule(void)
{
int i,next,c;
struct task_struct ** p;
/* check alarm, wake up any interruptible tasks that have got a signal */
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p) {
if ((*p)->alarm && (*p)->alarm < jiffies) {
(*p)->signal |= (1<<(SIGALRM-1));
(*p)->alarm = 0;
}
if (((*p)->signal & ~(_BLOCKABLE & (*p)->blocked)) &&
(*p)->state==TASK_INTERRUPTIBLE)
(*p)->state=TASK_RUNNING;
}
/* this is the scheduler proper: */
while (1) {
c = -1;
next = 0;
i = NR_TASKS;
p = &task[NR_TASKS];
while (--i) {
if (!*--p)
continue;
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)
c = (*p)->counter, next = i;
}
if (c) break;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) +
(*p)->priority;
}
switch_to(next);
}
重新计算时间片:
time = oldtime / 2 + priority
相关接口:
1. pause , 暂时放弃CPU . 可打断.
int sys_pause(void)
{
current->state = TASK_INTERRUPTIBLE;
schedule();
return 0;
}
2. sleep_on 睡眠等待.不可打断. 比如等到某种资源的时候
void sleep_on(struct task_struct **p)
{
struct task_struct *tmp;
if (!p)
return;
if (current == &(init_task.task))
panic("task[0] trying to sleep");
tmp = *p;
*p = current;
current->state = TASK_UNINTERRUPTIBLE;
schedule();
if (tmp)
tmp->state=0;
}3 . 可打断睡眠 , 多用于多进程等待同一个资源的时候. 可以形成等待队列.
void interruptible_sleep_on(struct task_struct **p)
{
struct task_struct *tmp;
if (!p)
return;
if (current == &(init_task.task))
panic("task[0] trying to sleep");
tmp=*p;
*p=current;
repeat: current->state = TASK_INTERRUPTIBLE;
schedule();
if (*p && *p != current) {
(**p).state=0;
goto repeat;
}
*p=NULL;
if (tmp)
tmp->state=0;
}
4. 唤醒进程 . 不论进程处于何种状态都唤醒它.
void wake_up(struct task_struct **p)
{
if (p && *p) {
(**p).state=0;
*p=NULL;
}
}
5. nice . 降低优先级. 更愿意出让CPU . 但是设置的increment 必须不大于当前的优先级数值.
int sys_nice(long increment)
{
if (current->priority-increment>0)
current->priority -= increment;
return 0;
}
scheduel 的调用者: (system_call.s)
reschedule: pushl $ret_from_sys_call jmp _schedule _system_call: cmpl $nr_system_calls-1,%eax # 检查系统调用号 ja bad_sys_call ... # 各种压栈 call _sys_call_table(,%eax,4) # 调用对应接口 pushl %eax movl _current,%eax # 拿到scheduel后的进程结构体指针 cmpl $0,state(%eax) # 如果不是运行态 就回去重新调度 jne reschedule cmpl $0,counter(%eax) # 如果时间片刚好消耗没了, 就回去重新调度 je reschedule
相关结构体:
保存进程指针的数组. 所有的进程保存在一个固定大小的数组中,所以Linux系统支持的最大进程数目是固定的.
进程之间有指针组成链表.
struct task_struct * task[NR_TASKS] = {&(init_task.task), };
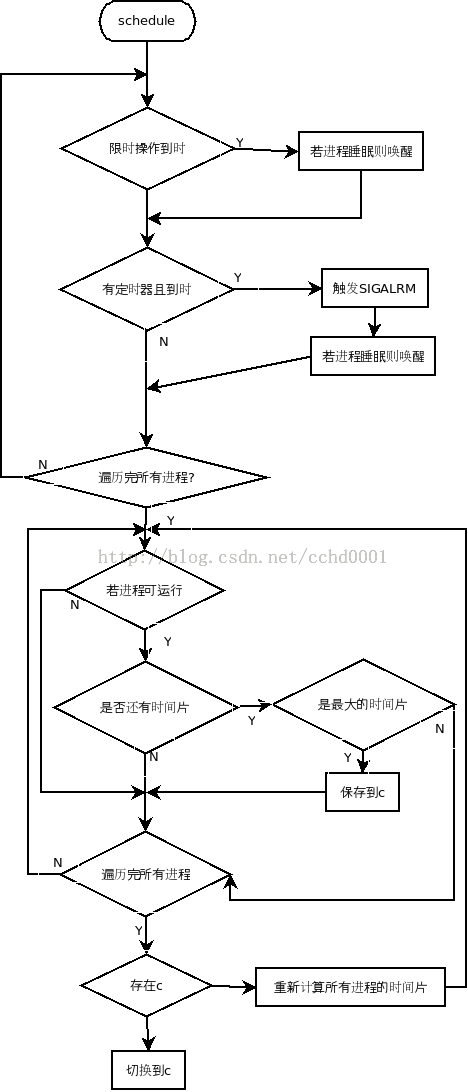
Linux V0.12
支持限时操作, 比如 select 支持最长等待时间.
schedual流程图:
源代码:
void schedule(void)
{
int i,next,c;
struct task_struct ** p;
/* check alarm, wake up any interruptible tasks that have got a signal */
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p) {
if ((*p)->timeout && (*p)->timeout < jiffies) {
(*p)->timeout = 0;
if ((*p)->state == TASK_INTERRUPTIBLE)
(*p)->state = TASK_RUNNING;
}
if ((*p)->alarm && (*p)->alarm < jiffies) {
(*p)->signal |= (1<<(SIGALRM-1));
(*p)->alarm = 0;
}
if (((*p)->signal & ~(_BLOCKABLE & (*p)->blocked)) &&
(*p)->state==TASK_INTERRUPTIBLE)
(*p)->state=TASK_RUNNING;
}
/* this is the scheduler proper: */
while (1) {
c = -1;
next = 0;
i = NR_TASKS;
p = &task[NR_TASKS];
while (--i) {
if (!*--p)
continue;
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)
c = (*p)->counter, next = i;
}
if (c) break;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) +
(*p)->priority;
}
switch_to(next);
}
相关函数修改:
1. 添加接口 __sleep_on , 睡眠等待和可打断睡眠均直接调用此接口
static inline void __sleep_on(struct task_struct **p, int state)
{
struct task_struct *tmp;
if (!p)
return;
if (current == &(init_task.task))
panic("task[0] trying to sleep");
tmp = *p;
*p = current;
current->state = state;
repeat: schedule();
if (*p && *p != current) {
(**p).state = 0;
current->state = TASK_UNINTERRUPTIBLE;
goto repeat;
}
if (!*p)
printk("Warning: *P = NULL\n\r");
if (*p = tmp)
tmp->state=0;
}
void interruptible_sleep_on(struct task_struct **p)
{
__sleep_on(p,TASK_INTERRUPTIBLE);
}
void sleep_on(struct task_struct **p)
{
__sleep_on(p,TASK_UNINTERRUPTIBLE);
}
2. 唤醒进程的时候对已经停止的进程和僵尸进程进行警告
void wake_up(struct task_struct **p)
{
if (p && *p) {
if ((**p).state == TASK_STOPPED)
printk("wake_up: TASK_STOPPED");
if ((**p).state == TASK_ZOMBIE)
printk("wake_up: TASK_ZOMBIE");
(**p).state=0;
}
}
Linux V0.95
仅仅修改了一点, 关于signal 屏蔽位:
if (((*p)->signal & ~(_BLOCKABLE & (*p)->blocked)) && (*p)->state==TASK_INTERRUPTIBLE) (*p)->state=TASK_RUNNING;
==>
if (((*p)->signal & ~(*p)->blocked) && (*p)->state==TASK_INTERRUPTIBLE) (*p)->state=TASK_RUNNING;
因为V0.95 版本在sys_ssetmask函数中已经去掉了SIGKILL 和 SIGSTOP :
int sys_ssetmask(int newmask)
{
int old=current->blocked;
current->blocked = newmask & ~(1<<(SIGKILL-1)) & ~(1<<(SIGSTOP-1));
return old;
}
相关接口修改:
1. 暂时出让CPU的进程对SIG_IGN信号进行了屏蔽 :
int sys_pause(void)
{
unsigned long old_blocked;
unsigned long mask;
struct sigaction * sa = current->sigaction;
old_blocked = current->blocked;
for (mask=1 ; mask ; sa++,mask += mask)
if (sa->sa_handler == SIG_IGN)
current->blocked |= mask;
current->state = TASK_INTERRUPTIBLE;
schedule();
current->blocked = old_blocked;
return -EINTR;
}
2. __sleep_on 接口对标志寄存器进行了保护, 使用CTL STI 指令保证原子操作性.
static inline void __sleep_on(struct task_struct **p, int state)
{
struct task_struct *tmp;
unsigned int flags;
if (!p)
return;
if (current == &(init_task.task))
panic("task[0] trying to sleep");
__asm__("pushfl ; popl %0":"=r" (flags));
tmp = *p;
*p = current;
current->state = state;
/* make sure interrupts are enabled: there should be no more races here */
sti();
repeat: schedule();
if (*p && *p != current) {
current->state = TASK_UNINTERRUPTIBLE;
(**p).state = 0;
goto repeat;
}
if (*p = tmp)
tmp->state=0;
__asm__("pushl %0 ; popfl"::"r" (flags));
}3. nice函数处理了increment 比当前优先值大的情况: 直接减成 1
int sys_nice(long increment)
{
if (increment < 0 && !suser())
return -EPERM;
if (increment > current->priority)
increment = current->priority-1;
current->priority -= increment;
return 0;
}
Linux V0.95a
修改对限时操作的BUG:
if ((*p)->timeout && (*p)->timeout < jiffies) {
(*p)->timeout = 0;
if ((*p)->state == TASK_INTERRUPTIBLE)
(*p)->state = TASK_RUNNING;
}
==>
if ((*p)->timeout && (*p)->timeout < jiffies)
if ((*p)->state == TASK_INTERRUPTIBLE) {
(*p)->timeout = 0;
(*p)->state = TASK_RUNNING;
}
相关的接口修改:
1. 将next_wait 加入结构体 task_strcut. 从而使用它来维护睡眠等待列表, 不再唤醒僵尸进程和终止进程.
void wake_up(struct task_struct **p)
{
struct task_struct * wakeup_ptr, * tmp;
if (p && *p) {
wakeup_ptr = *p;
*p = NULL;
while (wakeup_ptr && wakeup_ptr != task[0]) {
if (wakeup_ptr->state == TASK_STOPPED)
printk("wake_up: TASK_STOPPED\n");
else if (wakeup_ptr->state == TASK_ZOMBIE)
printk("wake_up: TASK_ZOMBIE\n");
else
wakeup_ptr->state = TASK_RUNNING;
tmp = wakeup_ptr->next_wait;
wakeup_ptr->next_wait = task[0];
wakeup_ptr = tmp;
}
}
}
static inline void __sleep_on(struct task_struct **p, int state)
{
unsigned int flags;
if (!p)
return;
if (current == task[0])
panic("task[0] trying to sleep");
__asm__("pushfl ; popl %0":"=r" (flags));
current->next_wait = *p;
task[0]->next_wait = NULL;
*p = current;
current->state = state;
sti();
schedule();
if (current->next_wait != task[0])
wake_up(p);
current->next_wait = NULL;
__asm__("pushl %0 ; popfl"::"r" (flags));
}
Linux V0.95c
无相关修改
Linux V0.96a
添加了一项高优先级抢占功能:
当新唤醒的进程更优先的时候, 就重新调度.
实现:
1. scheduel 函数仅仅在开始加上一句代码:
need_resched = 0;
2. wake_up 函数检查新唤醒的进程优先级是否大于当前的. 是则设置need_resched = 1
void wake_up(struct task_struct **p)
{
struct task_struct * wakeup_ptr, * tmp;
if (p && *p) {
wakeup_ptr = *p;
*p = NULL;
while (wakeup_ptr && wakeup_ptr != task[0]) {
if (wakeup_ptr->state == TASK_ZOMBIE)
printk("wake_up: TASK_ZOMBIE\n");
else if (wakeup_ptr->state != TASK_STOPPED) {
wakeup_ptr->state = TASK_RUNNING;
if (wakeup_ptr->counter > current->counter)
need_resched = 1;
}
tmp = wakeup_ptr->next_wait;
wakeup_ptr->next_wait = task[0];
wakeup_ptr = tmp;
}
}
}
3. system_call 检查need_resched, 若非0 就重新调度:
reschedule: pushl $ret_from_sys_call jmp _schedule .align 2 _system_call: pushl %eax # save orig_eax SAVE_ALL cmpl _NR_syscalls,%eax jae bad_sys_call call _sys_call_table(,%eax,4) movl %eax,EAX(%esp) # save the return value ret_from_sys_call: cmpw $0x0f,CS(%esp) # was old code segment supervisor ? jne 2f cmpw $0x17,OLDSS(%esp) # was stack segment = 0x17 ? jne 2f 1: movl _current,%eax cmpl _task,%eax # task[0] cannot have signals je 2 cmpl $0,_need_resched # 检查need_resched, 若非0 就重新调度 jne reschedule cmpl $0,state(%eax) # state jne reschedule cmpl $0,counter(%eax) # counter je reschedule
相关接口修改:
1.修改nice 接口 ,保证优先级不会被改成0
int sys_nice(long increment)
{
if (increment < 0 && !suser())
return -EPERM;
if (increment >= current->priority) // 原先是 increment > current->priority
increment = current->priority-1;
current->priority -= increment;
return 0;
}
2. 修改system_call , 若进程调度后仍为同一进程则不再检查状态和时间片
1: movl _current,%eax cmpl _task,%eax # task[0] cannot have signals je 2f cmpl $0,_need_resched jne reschedule cmpl $0,state(%eax) # state jne reschedule cmpl $0,counter(%eax) # counter je reschedule
Linux V0.96b
将定时器部分益处scheduel, 这部分功能由 do_timer 接管.
流程图:
源代码:
void schedule(void)
{
int i,next,c;
struct task_struct ** p;
/* check alarm, wake up any interruptible tasks that have got a signal */
need_resched = 0;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p) {
if ((*p)->timeout && (*p)->timeout < jiffies)
if ((*p)->state == TASK_INTERRUPTIBLE) {
(*p)->timeout = 0;
(*p)->state = TASK_RUNNING;
}
if (((*p)->signal & ~(*p)->blocked) &&
(*p)->state==TASK_INTERRUPTIBLE)
(*p)->state=TASK_RUNNING;
}
/* this is the scheduler proper: */
while (1) {
c = -1;
next = 0;
i = NR_TASKS;
p = &task[NR_TASKS];
while (--i) {
if (!*--p)
continue;
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)
c = (*p)->counter, next = i;
}
if (c) break;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) +
(*p)->priority;
}
switch_to(next);
}
Linux V0.96c
无相关修改
Linux V0.97
添加 wake_one_task接口 ,修了scheduel的BUG , 使得调度的时候被唤醒的高优先级的进程也可以抢占.1. 新的schedule
void schedule(void)
{
int i,next,c;
struct task_struct ** p;
/* check alarm, wake up any interruptible tasks that have got a signal */
need_resched = 0;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p) {
if ((*p)->timeout && (*p)->timeout < jiffies)
if ((*p)->state == TASK_INTERRUPTIBLE) {
(*p)->timeout = 0;
wake_one_task(*p); // 原来直接改变p->state
}
if (((*p)->signal & ~(*p)->blocked) &&
(*p)->state==TASK_INTERRUPTIBLE)
wake_one_task(*p); // 原来直接改变p->state
}
/* this is the scheduler proper: */
while (1) {
c = -1;
next = 0;
i = NR_TASKS;
p = &task[NR_TASKS];
while (--i) {
if (!*--p)
continue;
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)
c = (*p)->counter, next = i;
}
if (c)
break;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) +
(*p)->priority;
}
sti(); // 保证原子操作
switch_to(next);
}
辅助接口 :
void wake_one_task(struct task_struct * p)
{
p->state = TASK_RUNNING;
if (p->counter > current->counter)
need_resched = 1;
}
2. 定义了 wait_queue .在 sched.h 里面添加了接口 : add_wait_queue 和 remove_wait_queue . 使得这个环状链表的操作更美观.
接口代码:
extern inline void add_wait_queue(struct wait_queue ** p, struct wait_queue * wait)
{
unsigned long flags;
struct wait_queue * tmp;
__asm__ __volatile__("pushfl ; popl %0 ; cli":"=r" (flags));
wait->next = *p;
tmp = wait;
while (tmp->next)
if ((tmp = tmp->next)->next == *p)
break;
*p = tmp->next = wait;
__asm__ __volatile__("pushl %0 ; popfl"::"r" (flags));
}
extern inline void remove_wait_queue(struct wait_queue ** p, struct wait_queue * wait)
{
unsigned long flags;
struct wait_queue * tmp;
__asm__ __volatile__("pushfl ; popl %0 ; cli":"=r" (flags));
if (*p == wait)
if ((*p = wait->next) == wait)
*p = NULL;
tmp = wait;
while (tmp && tmp->next != wait)
tmp = tmp->next;
if (tmp)
tmp->next = wait->next;
wait->next = NULL;
__asm__ __volatile__("pushl %0 ; popfl"::"r" (flags));
}
然后对对应的 __sleep_on 接口进行了修改
static inline void __sleep_on(struct wait_queue **p, int state)
{
unsigned long flags;
if (!p)
return;
if (current == task[0])
panic("task[0] trying to sleep");
if (current->wait.next)
printk("__sleep_on: wait->next exists\n");
__asm__ __volatile__("pushfl ; popl %0 ; cli":"=r" (flags));
current->state = state;
add_wait_queue(p,¤t->wait);
sti();
schedule();
remove_wait_queue(p,¤t->wait);
__asm__("pushl %0 ; popfl"::"r" (flags));
}
3. wake_up 函数也有改变, 但是只是将 while 改成了 do .. . while .
Linux V1.0
首先, scheduel函数重新接管了定时器, 当然代码更加复杂了. 但是流程图回到了 V1.2 版.
其次, 为了产生更高效率的机器码, 使用 for(;;) 代替while , 使用goto 代替if
最后, 不再依靠遍历task数组来遍历所有的进程,改为遍历环状链表.
源代码:
asmlinkage void schedule(void)
{
int c;
struct task_struct * p;
struct task_struct * next;
unsigned long ticks;
/* check alarm, wake up any interruptible tasks that have got a signal */
cli();
ticks = itimer_ticks;
itimer_ticks = 0;
itimer_next = ~0;
sti();
need_resched = 0;
p = &init_task;
for (;;) {
if ((p = p->next_task) == &init_task)
goto confuse_gcc1;
if (ticks && p->it_real_value) {
if (p->it_real_value <= ticks) {
send_sig(SIGALRM, p, 1);
if (!p->it_real_incr) {
p->it_real_value = 0;
goto end_itimer;
}
do {
p->it_real_value += p->it_real_incr;
} while (p->it_real_value <= ticks);
}
p->it_real_value -= ticks;
if (p->it_real_value < itimer_next)
itimer_next = p->it_real_value;
}
end_itimer:
if (p->state != TASK_INTERRUPTIBLE)
continue;
if (p->signal & ~p->blocked) {
p->state = TASK_RUNNING;
continue;
}
if (p->timeout && p->timeout <= jiffies) {
p->timeout = 0;
p->state = TASK_RUNNING;
}
}
confuse_gcc1:
/* this is the scheduler proper: */
#if 0
/* give processes that go to sleep a bit higher priority.. */
/* This depends on the values for TASK_XXX */
/* This gives smoother scheduling for some things, but */
/* can be very unfair under some circumstances, so.. */
if (TASK_UNINTERRUPTIBLE >= (unsigned) current->state &&
current->counter < current->priority*2) {
++current->counter;
}
#endif
c = -1;
next = p = &init_task;
for (;;) {
if ((p = p->next_task) == &init_task)
goto confuse_gcc2;
if (p->state == TASK_RUNNING && p->counter > c)
c = p->counter, next = p;
}
confuse_gcc2:
if (!c) {
for_each_task(p)
p->counter = (p->counter >> 1) + p->priority;
}
if(current != next)
kstat.context_swtch++;
switch_to(next);
/* Now maybe reload the debug registers */
if(current->debugreg[7]){
loaddebug(0);
loaddebug(1);
loaddebug(2);
loaddebug(3);
loaddebug(6);
};
}
相关函数修改:
1. wake_up 对环状列表的所有睡眠的进程进行唤醒
void wake_up(struct wait_queue **q)
{
struct wait_queue *tmp;
struct task_struct * p;
if (!q || !(tmp = *q))
return;
do {
if ((p = tmp->task) != NULL) {
if ((p->state == TASK_UNINTERRUPTIBLE) ||
(p->state == TASK_INTERRUPTIBLE)) {
p->state = TASK_RUNNING;
if (p->counter > current->counter)
need_resched = 1;
}
}
if (!tmp->next) {
printk("wait_queue is bad (eip = %08lx)\n",((unsigned long *) q)[-1]);
printk(" q = %p\n",q);
printk(" *q = %p\n",*q);
printk(" tmp = %p\n",tmp);
break;
}
tmp = tmp->next;
} while (tmp != *q);
}
2. 加入接口wake_up_interruptible, 仅唤醒可中断睡眠的进行
void wake_up_interruptible(struct wait_queue **q)
{
struct wait_queue *tmp;
struct task_struct * p;
if (!q || !(tmp = *q))
return;
do {
if ((p = tmp->task) != NULL) {
if (p->state == TASK_INTERRUPTIBLE) {
p->state = TASK_RUNNING;
if (p->counter > current->counter)
need_resched = 1;
}
}
if (!tmp->next) {
printk("wait_queue is bad (eip = %08lx)\n",((unsigned long *) q)[-1]);
printk(" q = %p\n",q);
printk(" *q = %p\n",*q);
printk(" tmp = %p\n",tmp);
break;
}
tmp = tmp->next;
} while (tmp != *q);
}
3. 为了保护竞争资源加入了__down接口实现了计数的信号量机制
void __down(struct semaphore * sem)
{
struct wait_queue wait = { current, NULL };
add_wait_queue(&sem->wait, &wait);
current->state = TASK_UNINTERRUPTIBLE;
while (sem->count <= 0) {
schedule();
current->state = TASK_UNINTERRUPTIBLE;
}
current->state = TASK_RUNNING;
remove_wait_queue(&sem->wait, &wait);
}
4. 通过nice接口, 限制优先级数值为1-35 .
asmlinkage int sys_nice(long increment)
{
int newprio;
if (increment < 0 && !suser())
return -EPERM;
newprio = current->priority - increment;
if (newprio < 1)
newprio = 1;
if (newprio > 35)
newprio = 35;
current->priority = newprio;
return 0;
}
Linux V1.1
加入了个对中断的输出:
if (intr_count) {
printk("Aiee: scheduling in interrupt\n");
intr_count = 0;
}
Linux V1.2
删除了system_call.s 文件. 添加了arch文件夹, 系统跳用移动到对应内核的entry.S
Linux V1.3
1. 添加了对 scheduel时处理tq_scheduler的支持.
run_task_queue(&tq_scheduler);
2. 每次统计当前运行的进程数目
nr_running = 0; ... nr_running++;
Linux V2.0
大量的修改 , 先看源码 ,再一一解释:
asmlinkage void schedule(void)
{
int c;
struct task_struct * p;
struct task_struct * prev, * next;
unsigned long timeout = 0;
int this_cpu=smp_processor_id();
/* check alarm, wake up any interruptible tasks that have got a signal */
if (intr_count)
goto scheduling_in_interrupt;
if (bh_active & bh_mask) {
intr_count = 1;
do_bottom_half(); // 1. 添加了对 buttom half 的支持.
intr_count = 0;
}
run_task_queue(&tq_scheduler);
need_resched = 0;
prev = current;
cli();
/* move an exhausted RR process to be last.. */
if (!prev->counter && prev->policy == SCHED_RR) {
prev->counter = prev->priority;
move_last_runqueue(prev); //2. 加入了runquene的概念
}
switch (prev->state) {
case TASK_INTERRUPTIBLE:
if (prev->signal & ~prev->blocked)
goto makerunnable;
timeout = prev->timeout;
if (timeout && (timeout <= jiffies)) {
prev->timeout = 0;
timeout = 0;
makerunnable:
prev->state = TASK_RUNNING;
break;
}
default:
del_from_runqueue(prev);
case TASK_RUNNING:
}
p = init_task.next_run;
sti();
#ifdef __SMP__
/*
* This is safe as we do not permit re-entry of schedule()
*/
prev->processor = NO_PROC_ID;
#define idle_task (task[cpu_number_map[this_cpu]])
#else
#define idle_task (&init_task)
#endif
/*
* Note! there may appear new tasks on the run-queue during this, as
* interrupts are enabled. However, they will be put on front of the
* list, so our list starting at "p" is essentially fixed.
*/
/* this is the scheduler proper: */
c = -1000;
next = idle_task;
while (p != &init_task) {
int weight = goodness(p, prev, this_cpu); //3. 新的优先级计算方式
if (weight > c)
c = weight, next = p;
p = p->next_run;
}
/* if all runnable processes have "counter == 0", re-calculate counters */
if (!c) {
for_each_task(p)
p->counter = (p->counter >> 1) + p->priority;
}
#ifdef __SMP__ // 4. 多CPU支持
/*
* Allocate process to CPU
*/
next->processor = this_cpu;
next->last_processor = this_cpu;
#endif
#ifdef __SMP_PROF__
/* mark processor running an idle thread */
if (0==next->pid)
set_bit(this_cpu,&smp_idle_map);
else
clear_bit(this_cpu,&smp_idle_map);
#endif
if (prev != next) {
struct timer_list timer;
kstat.context_swtch++;
if (timeout) {
init_timer(&timer);
timer.expires = timeout;
timer.data = (unsigned long) prev;
timer.function = process_timeout;
add_timer(&timer);
}
get_mmu_context(next);
switch_to(prev,next);
if (timeout)
del_timer(&timer);
}
return;
scheduling_in_interrupt:
printk("Aiee: scheduling in interrupt %p\n",
__builtin_return_address(0));
}
1. 添加了对 buttom half 的支持.
利用 bh_active 和 bh_mask 两个掩码来记录软中断信息. 每次scheduel统一执行之 .
if (bh_active & bh_mask) {
intr_count = 1;
do_bottom_half();
intr_count = 0;
}
2. 定义了runquene的概念(task_struct 加入俩指针) , 加入接口 add_to_runqueue , del_from_runqueue, move_last_runqueue , 来支持对runquene的支持.
其中除了双向环状链表的操作, 就是对多CPU的支持.
static inline void add_to_runqueue(struct task_struct * p)
{
#ifdef __SMP__
int cpu=smp_processor_id();
#endif
#if 1 /* sanity tests */
if (p->next_run || p->prev_run) {
printk("task already on run-queue\n");
return;
}
#endif
if (p->counter > current->counter + 3)
need_resched = 1;
nr_running++;
(p->prev_run = init_task.prev_run)->next_run = p;
p->next_run = &init_task;
init_task.prev_run = p;
#ifdef __SMP__
/* this is safe only if called with cli()*/
while(set_bit(31,&smp_process_available))
{
while(test_bit(31,&smp_process_available))
{
if(clear_bit(cpu,&smp_invalidate_needed))
{
local_flush_tlb();
set_bit(cpu,&cpu_callin_map[0]);
}
}
}
smp_process_available++;
clear_bit(31,&smp_process_available);
if ((0!=p->pid) && smp_threads_ready)
{
int i;
for (i=0;i<smp_num_cpus;i++)
{
if (0==current_set[cpu_logical_map[i]]->pid)
{
smp_message_pass(cpu_logical_map[i], MSG_RESCHEDULE, 0L, 0);
break;
}
}
}
#endif
}
static inline void del_from_runqueue(struct task_struct * p)
{
struct task_struct *next = p->next_run;
struct task_struct *prev = p->prev_run;
#if 1 /* sanity tests */
if (!next || !prev) {
printk("task not on run-queue\n");
return;
}
#endif
if (p == &init_task) {
static int nr = 0;
if (nr < 5) {
nr++;
printk("idle task may not sleep\n");
}
return;
}
nr_running--;
next->prev_run = prev;
prev->next_run = next;
p->next_run = NULL;
p->prev_run = NULL;
}
static inline void move_last_runqueue(struct task_struct * p)
{
struct task_struct *next = p->next_run;
struct task_struct *prev = p->prev_run;
/* remove from list */
next->prev_run = prev;
prev->next_run = next;
/* add back to list */
p->next_run = &init_task;
prev = init_task.prev_run;
init_task.prev_run = p;
p->prev_run = prev;
prev->next_run = p;
}
3. 加入新的优先级计算方式.
加入了进程调度测略概念:
/* * Scheduling policies */ #define SCHED_OTHER 0 //一般的进程 #define SCHED_FIFO 1 // 实时进程, 一个进程执行完才执行另一个 #define SCHED_RR 2 // 实时进程, 固定执行时间片,轮转依次执行
添加了优先级计算接口 goodness
/*
* This is the function that decides how desirable a process is..
* You can weigh different processes against each other depending
* on what CPU they've run on lately etc to try to handle cache
* and TLB miss penalties.
*
* Return values:
* -1000: never select this
* 0: out of time, recalculate counters (but it might still be
* selected)
* +ve: "goodness" value (the larger, the better)
* +1000: realtime process, select this.
*/
static inline int goodness(struct task_struct * p, struct task_struct * prev, int this_cpu)
{
int weight;
#ifdef __SMP__
/* We are not permitted to run a task someone else is running */
if (p->processor != NO_PROC_ID)
return -1000; // CPU 不支持直接
#ifdef PAST_2_0
/* This process is locked to a processor group */
if (p->processor_mask && !(p->processor_mask & (1<<this_cpu))
return -1000; // 绑定特定CPU , 不需要当前CPU
#endif
#endif
/*
* Realtime process, select the first one on the
* runqueue (taking priorities within processes
* into account).
*/
if (p->policy != SCHED_OTHER)
return 1000 + p->rt_priority; // 实时程序, 立刻执行
/*
* Give the process a first-approximation goodness value
* according to the number of clock-ticks it has left.
*
* Don't do any other calculations if the time slice is
* over..
*/
weight = p->counter;
if (weight) {
#ifdef __SMP__
/* Give a largish advantage to the same processor... */
/* (this is equivalent to penalizing other processors) */
if (p->last_processor == this_cpu)
weight += PROC_CHANGE_PENALTY; // 同一CPU
#endif
/* .. and a slight advantage to the current process */
if (p == prev)
weight += 1; // 还是上一个进程
}
return weight;
}
4. 支持多CPU调度
相关接口修改:
加入接口 wake_up_process , 利用add_runquene , 被wake_up 和 wake_up_interruputible 取代p->state = TASK_RUNNING调用.
inline void wake_up_process(struct task_struct * p)
{
unsigned long flags;
save_flags(flags);
cli();
p->state = TASK_RUNNING;
if (!p->next_run)
add_to_runqueue(p);
restore_flags(flags);
}
nice接口策略修改, 限定 优先值 0 - DEF_PRIORITY*2
asmlinkage int sys_nice(int increment)
{
unsigned long newprio;
int increase = 0;
newprio = increment;
if (increment < 0) {
if (!suser())
return -EPERM;
newprio = -increment;
increase = 1;
}
if (newprio > 40)
newprio = 40;
/*
* do a "normalization" of the priority (traditionally
* unix nice values are -20..20, linux doesn't really
* use that kind of thing, but uses the length of the
* timeslice instead (default 150 msec). The rounding is
* why we want to avoid negative values.
*/
newprio = (newprio * DEF_PRIORITY + 10) / 20;
increment = newprio;
if (increase)
increment = -increment;
newprio = current->priority - increment;
if (newprio < 1)
newprio = 1;
if (newprio > DEF_PRIORITY*2)
newprio = DEF_PRIORITY*2;
current->priority = newprio;
return 0;
}
Linux V2.1
相关函数修改:
唤醒函数修改,统一使用wait_quene
void wake_up(struct wait_queue **q)
{
struct wait_queue *next;
struct wait_queue *head;
if (!q || !(next = *q))
return;
head = WAIT_QUEUE_HEAD(q);
while (next != head) {
struct task_struct *p = next->task;
next = next->next;
if (p != NULL) {
if ((p->state == TASK_UNINTERRUPTIBLE) ||
(p->state == TASK_INTERRUPTIBLE))
wake_up_process(p);
}
if (!next)
goto bad;
}
return;
bad:
printk("wait_queue is bad (eip = %p)\n",
__builtin_return_address(0));
printk(" q = %p\n",q);
printk(" *q = %p\n",*q);
}
void wake_up_interruptible(struct wait_queue **q)
{
struct wait_queue *next;
struct wait_queue *head;
if (!q || !(next = *q))
return;
head = WAIT_QUEUE_HEAD(q);
while (next != head) {
struct task_struct *p = next->task;
next = next->next;
if (p != NULL) {
if (p->state == TASK_INTERRUPTIBLE)
wake_up_process(p);
}
if (!next)
goto bad;
}
return;
bad:
printk("wait_queue is bad (eip = %p)\n",
__builtin_return_address(0));
printk(" q = %p\n",q);
printk(" *q = %p\n",*q);
}
对 sleep_on 接口加入原子保护
修改nice接口的一个bug .
if (newprio < 1)
==>
if ((signed) newprio < 1)
Linux V2.2
修改较多.
1. 添加CPU的的更多支持.
2. 对每个队列操作添加了信号量保护
源码:
asmlinkage void schedule(void)
{
struct schedule_data * sched_data;
struct task_struct * prev, * next;
int this_cpu;
prev = current;
this_cpu = prev->processor;
/*
* 'sched_data' is protected by the fact that we can run
* only one process per CPU.
*/
sched_data = & aligned_data[this_cpu].schedule_data;
if (in_interrupt())
goto scheduling_in_interrupt;
release_kernel_lock(prev, this_cpu);
/* Do "administrative" work here while we don't hold any locks */
if (bh_active & bh_mask)
do_bottom_half();
run_task_queue(&tq_scheduler);
spin_lock(&scheduler_lock);
spin_lock_irq(&runqueue_lock);
/* move an exhausted RR process to be last.. */
prev->need_resched = 0;
if (!prev->counter && prev->policy == SCHED_RR) {
prev->counter = prev->priority;
move_last_runqueue(prev);
}
switch (prev->state) {
case TASK_INTERRUPTIBLE:
if (signal_pending(prev)) {
prev->state = TASK_RUNNING;
break;
}
default:
del_from_runqueue(prev);
case TASK_RUNNING:
}
sched_data->prevstate = prev->state;
{
struct task_struct * p = init_task.next_run;
/*
* This is subtle.
* Note how we can enable interrupts here, even
* though interrupts can add processes to the run-
* queue. This is because any new processes will
* be added to the front of the queue, so "p" above
* is a safe starting point.
* run-queue deletion and re-ordering is protected by
* the scheduler lock
*/
spin_unlock_irq(&runqueue_lock);
#ifdef __SMP__
prev->has_cpu = 0;
#endif
/*
* Note! there may appear new tasks on the run-queue during this, as
* interrupts are enabled. However, they will be put on front of the
* list, so our list starting at "p" is essentially fixed.
*/
/* this is the scheduler proper: */
{
int c = -1000;
next = idle_task;
while (p != &init_task) {
if (can_schedule(p)) {
int weight = goodness(p, prev, this_cpu);
if (weight > c)
c = weight, next = p;
}
p = p->next_run;
}
/* Do we need to re-calculate counters? */
if (!c) {
struct task_struct *p;
read_lock(&tasklist_lock);
for_each_task(p)
p->counter = (p->counter >> 1) + p->priority;
read_unlock(&tasklist_lock);
}
}
}
/*
* maintain the per-process 'average timeslice' value.
* (this has to be recalculated even if we reschedule to
* the same process) Currently this is only used on SMP:
*/
#ifdef __SMP__
{
cycles_t t, this_slice;
t = get_cycles();
this_slice = t - sched_data->last_schedule;
sched_data->last_schedule = t;
/*
* Simple, exponentially fading average calculation:
*/
prev->avg_slice = this_slice + prev->avg_slice;
prev->avg_slice >>= 1;
}
/*
* We drop the scheduler lock early (it's a global spinlock),
* thus we have to lock the previous process from getting
* rescheduled during switch_to().
*/
prev->has_cpu = 1;
next->has_cpu = 1;
next->processor = this_cpu;
spin_unlock(&scheduler_lock);
#endif /* __SMP__ */
if (prev != next) {
#ifdef __SMP__
sched_data->prev = prev;
#endif
kstat.context_swtch++;
get_mmu_context(next);
switch_to(prev,next);
__schedule_tail();
}
reacquire_kernel_lock(current);
return;
scheduling_in_interrupt:
printk("Scheduling in interrupt\n");
*(int *)0 = 0;
}
相关接口修改:
添加接口reschedule_idle, 对唤醒进程后重新调度之前做了更过工作
void wake_up_process(struct task_struct * p)
{
unsigned long flags;
spin_lock_irqsave(&runqueue_lock, flags);
p->state = TASK_RUNNING;
if (!p->next_run) {
add_to_runqueue(p);
reschedule_idle(p);
}
spin_unlock_irqrestore(&runqueue_lock, flags);
}主要是对多CPU的支持. 同时对优先级更高有了新的定义 : 至少大于3
static inline void reschedule_idle(struct task_struct * p)
{
if (p->policy != SCHED_OTHER || p->counter > current->counter + 3) {
current->need_resched = 1;
return;
}
#ifdef __SMP__
/*
* ("wakeup()" should not be called before we've initialized
* SMP completely.
* Basically a not-yet initialized SMP subsystem can be
* considered as a not-yet working scheduler, simply dont use
* it before it's up and running ...)
*
* SMP rescheduling is done in 2 passes:
* - pass #1: faster: 'quick decisions'
* - pass #2: slower: 'lets try and find another CPU'
*/
/*
* Pass #1
*
* There are two metrics here:
*
* first, a 'cutoff' interval, currently 0-200 usecs on
* x86 CPUs, depending on the size of the 'SMP-local cache'.
* If the current process has longer average timeslices than
* this, then we utilize the idle CPU.
*
* second, if the wakeup comes from a process context,
* then the two processes are 'related'. (they form a
* 'gang')
*
* An idle CPU is almost always a bad thing, thus we skip
* the idle-CPU utilization only if both these conditions
* are true. (ie. a 'process-gang' rescheduling with rather
* high frequency should stay on the same CPU).
*
* [We can switch to something more finegrained in 2.3.]
*/
if ((current->avg_slice < cacheflush_time) && related(current, p))
return;
reschedule_idle_slow(p);
#endif /* __SMP__ */
}
添加了新的睡眠接口,支持定时睡眠
signed long schedule_timeout(signed long timeout)
{
struct timer_list timer;
unsigned long expire;
switch (timeout)
{
case MAX_SCHEDULE_TIMEOUT:
/*
* These two special cases are useful to be comfortable
* in the caller. Nothing more. We could take
* MAX_SCHEDULE_TIMEOUT from one of the negative value
* but I' d like to return a valid offset (>=0) to allow
* the caller to do everything it want with the retval.
*/
schedule();
goto out;
default:
/*
* Another bit of PARANOID. Note that the retval will be
* 0 since no piece of kernel is supposed to do a check
* for a negative retval of schedule_timeout() (since it
* should never happens anyway). You just have the printk()
* that will tell you if something is gone wrong and where.
*/
if (timeout < 0)
{
printk(KERN_ERR "schedule_timeout: wrong timeout "
"value %lx from %p\n", timeout,
__builtin_return_address(0));
goto out;
}
}
expire = timeout + jiffies;
init_timer(&timer);
timer.expires = expire;
timer.data = (unsigned long) current;
timer.function = process_timeout;
add_timer(&timer);
schedule();
del_timer(&timer);
timeout = expire - jiffies;
out:
return timeout < 0 ? 0 : timeout;
}
/*
* This one aligns per-CPU data on cacheline boundaries.
*/
static union {
struct schedule_data {
struct task_struct * prev;
long prevstate;
cycles_t last_schedule;
} schedule_data;
char __pad [L1_CACHE_BYTES];
} aligned_data [NR_CPUS] __cacheline_aligned = { {{&init_task,0}}};
static inline void __schedule_tail (void)
{
#ifdef __SMP__
struct schedule_data * sched_data;
/*
* We might have switched CPUs:
*/
sched_data = & aligned_data[smp_processor_id()].schedule_data;
/*
* Subtle. In the rare event that we got a wakeup to 'prev' just
* during the reschedule (this is possible, the scheduler is pretty
* parallel), we should do another reschedule in the next task's
* context. schedule() will do the right thing next time around.
* this is equivalent to 'delaying' the wakeup until the reschedule
* has finished.
*/
if (sched_data->prev->state != sched_data->prevstate)
current->need_resched = 1;
/*
* Release the previous process ...
*
* We have dropped all locks, and we must make sure that we
* only mark the previous process as no longer having a CPU
* after all other state has been seen by other CPU's. Thus
* the write memory barrier!
*/
wmb();
sched_data->prev->has_cpu = 0;
#endif /* __SMP__ */
}
void interruptible_sleep_on(struct wait_queue **p)
{
SLEEP_ON_VAR
current->state = TASK_INTERRUPTIBLE;
SLEEP_ON_HEAD
schedule();
SLEEP_ON_TAIL
}
long interruptible_sleep_on_timeout(struct wait_queue **p, long timeout)
{
SLEEP_ON_VAR
current->state = TASK_INTERRUPTIBLE;
SLEEP_ON_HEAD
timeout = schedule_timeout(timeout);
SLEEP_ON_TAIL
return timeout;
}
void sleep_on(struct wait_queue **p)
{
SLEEP_ON_VAR
current->state = TASK_UNINTERRUPTIBLE;
SLEEP_ON_HEAD
schedule();
SLEEP_ON_TAIL
}
long sleep_on_timeout(struct wait_queue **p, long timeout)
{
SLEEP_ON_VAR
current->state = TASK_UNINTERRUPTIBLE;
SLEEP_ON_HEAD
timeout = schedule_timeout(timeout);
SLEEP_ON_TAIL
return timeout;
}
Linux V2.3
1. 对多CPU支持进行了更多修改, 这里不讨论.
2. scheduel函数本身逻辑并无太大修改,但是大量使用goto 替换原来的if { ... } \
3. 更多的使用信号量保护.
源码:
asmlinkage void schedule(void)
{
struct schedule_data * sched_data;
struct task_struct *prev, *next, *p;
int this_cpu, c;
if (tq_scheduler)
goto handle_tq_scheduler;
tq_scheduler_back:
prev = current;
this_cpu = prev->processor;
if (in_interrupt())
goto scheduling_in_interrupt;
release_kernel_lock(prev, this_cpu);
/* Do "administrative" work here while we don't hold any locks */
if (bh_mask & bh_active)
goto handle_bh;
handle_bh_back:
/*
* 'sched_data' is protected by the fact that we can run
* only one process per CPU.
*/
sched_data = & aligned_data[this_cpu].schedule_data;
spin_lock_irq(&runqueue_lock);
/* move an exhausted RR process to be last.. */
if (prev->policy == SCHED_RR)
goto move_rr_last;
move_rr_back:
switch (prev->state) {
case TASK_INTERRUPTIBLE:
if (signal_pending(prev)) {
prev->state = TASK_RUNNING;
break;
}
default:
del_from_runqueue(prev);
case TASK_RUNNING:
}
prev->need_resched = 0;
repeat_schedule:
/*
* this is the scheduler proper:
*/
p = init_task.next_run;
/* Default process to select.. */
next = idle_task(this_cpu);
c = -1000;
if (prev->state == TASK_RUNNING)
goto still_running;
still_running_back:
/*
* This is subtle.
* Note how we can enable interrupts here, even
* though interrupts can add processes to the run-
* queue. This is because any new processes will
* be added to the front of the queue, so "p" above
* is a safe starting point.
* run-queue deletion and re-ordering is protected by
* the scheduler lock
*/
/*
* Note! there may appear new tasks on the run-queue during this, as
* interrupts are enabled. However, they will be put on front of the
* list, so our list starting at "p" is essentially fixed.
*/
while (p != &init_task) {
if (can_schedule(p)) {
int weight = goodness(prev, p, this_cpu);
if (weight > c)
c = weight, next = p;
}
p = p->next_run;
}
/* Do we need to re-calculate counters? */
if (!c)
goto recalculate;
/*
* from this point on nothing can prevent us from
* switching to the next task, save this fact in
* sched_data.
*/
sched_data->curr = next;
#ifdef __SMP__
next->has_cpu = 1;
next->processor = this_cpu;
#endif
spin_unlock_irq(&runqueue_lock);
if (prev == next)
goto same_process;
#ifdef __SMP__
/*
* maintain the per-process 'average timeslice' value.
* (this has to be recalculated even if we reschedule to
* the same process) Currently this is only used on SMP,
* and it's approximate, so we do not have to maintain
* it while holding the runqueue spinlock.
*/
{
cycles_t t, this_slice;
t = get_cycles();
this_slice = t - sched_data->last_schedule;
sched_data->last_schedule = t;
/*
* Exponentially fading average calculation, with
* some weight so it doesnt get fooled easily by
* smaller irregularities.
*/
prev->avg_slice = (this_slice*1 + prev->avg_slice*1)/2;
}
/*
* We drop the scheduler lock early (it's a global spinlock),
* thus we have to lock the previous process from getting
* rescheduled during switch_to().
*/
#endif /* __SMP__ */
kstat.context_swtch++;
get_mmu_context(next);
switch_to(prev, next, prev);
__schedule_tail(prev);
same_process:
reacquire_kernel_lock(current);
return;
recalculate:
{
struct task_struct *p;
spin_unlock_irq(&runqueue_lock);
read_lock(&tasklist_lock);
for_each_task(p)
p->counter = (p->counter >> 1) + p->priority;
read_unlock(&tasklist_lock);
spin_lock_irq(&runqueue_lock);
goto repeat_schedule;
}
still_running:
c = prev_goodness(prev, prev, this_cpu);
next = prev;
goto still_running_back;
handle_bh:
do_bottom_half();
goto handle_bh_back;
handle_tq_scheduler:
run_task_queue(&tq_scheduler);
goto tq_scheduler_back;
move_rr_last:
if (!prev->counter) {
prev->counter = prev->priority;
move_last_runqueue(prev);
}
goto move_rr_back;
scheduling_in_interrupt:
printk("Scheduling in interrupt\n");
*(int *)0 = 0;
return;
}
相关函数修改:
唤醒函数
void __wake_up(struct wait_queue **q, unsigned int mode)
{
struct task_struct *p;
struct wait_queue *head, *next;
if (!q)
goto out;
/*
* this is safe to be done before the check because it
* means no deference, just pointer operations.
*/
head = WAIT_QUEUE_HEAD(q);
read_lock(&waitqueue_lock);
next = *q;
if (!next)
goto out_unlock;
while (next != head) {
p = next->task;
next = next->next;
if (p->state & mode) {
/*
* We can drop the read-lock early if this
* is the only/last process.
*/
if (next == head) {
read_unlock(&waitqueue_lock);
wake_up_process(p);
goto out;
}
wake_up_process(p);
}
}
out_unlock:
read_unlock(&waitqueue_lock);
out:
return;
}
同时 __schedule_tail 接口也开始调用 reschedule_idle . 仍然是针对多CPU支持
/*
* schedule_tail() is getting called from the fork return path. This
* cleans up all remaining scheduler things, without impacting the
* common case.
*/
static inline void __schedule_tail (struct task_struct *prev)
{
#ifdef __SMP__
if ((prev->state == TASK_RUNNING) &&
(prev != idle_task(smp_processor_id())))
reschedule_idle(prev);
wmb();
prev->has_cpu = 0;
#endif /* __SMP__ */
}
void schedule_tail (struct task_struct *prev)
{
__schedule_tail(prev);
}
Linux V2.4
1. scheduel添加了对内存的判断, 进程至少要有有效内存
if (!current->active_mm) BUG();
2. 添加了 prepare_to_switch 部分.
prepare_to_switch();
{
struct mm_struct *mm = next->mm;
struct mm_struct *oldmm = prev->active_mm;
if (!mm) {
if (next->active_mm) BUG();
next->active_mm = oldmm;
atomic_inc(&oldmm->mm_count);
enter_lazy_tlb(oldmm, next, this_cpu);
} else {
if (next->active_mm != mm) BUG();
switch_mm(oldmm, mm, next, this_cpu);
}
if (!prev->mm) {
prev->active_mm = NULL;
mmdrop(oldmm);
}
}
scheduel 源码 :
asmlinkage void schedule(void)
{
struct schedule_data * sched_data;
struct task_struct *prev, *next, *p;
struct list_head *tmp;
int this_cpu, c;
if (!current->active_mm) BUG();
need_resched_back:
prev = current;
this_cpu = prev->processor;
if (in_interrupt())
goto scheduling_in_interrupt;
release_kernel_lock(prev, this_cpu);
/* Do "administrative" work here while we don't hold any locks */
if (softirq_active(this_cpu) & softirq_mask(this_cpu))
goto handle_softirq;
handle_softirq_back:
/*
* 'sched_data' is protected by the fact that we can run
* only one process per CPU.
*/
sched_data = & aligned_data[this_cpu].schedule_data;
spin_lock_irq(&runqueue_lock);
/* move an exhausted RR process to be last.. */
if (prev->policy == SCHED_RR)
goto move_rr_last;
move_rr_back:
switch (prev->state) {
case TASK_INTERRUPTIBLE:
if (signal_pending(prev)) {
prev->state = TASK_RUNNING;
break;
}
default:
del_from_runqueue(prev);
case TASK_RUNNING:
}
prev->need_resched = 0;
/*
* this is the scheduler proper:
*/
repeat_schedule:
/*
* Default process to select..
*/
next = idle_task(this_cpu);
c = -1000;
if (prev->state == TASK_RUNNING)
goto still_running;
still_running_back:
list_for_each(tmp, &runqueue_head) {
p = list_entry(tmp, struct task_struct, run_list);
if (can_schedule(p, this_cpu)) {
int weight = goodness(p, this_cpu, prev->active_mm);
if (weight > c)
c = weight, next = p;
}
}
/* Do we need to re-calculate counters? */
if (!c)
goto recalculate;
/*
* from this point on nothing can prevent us from
* switching to the next task, save this fact in
* sched_data.
*/
sched_data->curr = next;
#ifdef CONFIG_SMP
next->has_cpu = 1;
next->processor = this_cpu;
#endif
spin_unlock_irq(&runqueue_lock);
if (prev == next)
goto same_process;
#ifdef CONFIG_SMP
/*
* maintain the per-process 'last schedule' value.
* (this has to be recalculated even if we reschedule to
* the same process) Currently this is only used on SMP,
* and it's approximate, so we do not have to maintain
* it while holding the runqueue spinlock.
*/
sched_data->last_schedule = get_cycles();
/*
* We drop the scheduler lock early (it's a global spinlock),
* thus we have to lock the previous process from getting
* rescheduled during switch_to().
*/
#endif /* CONFIG_SMP */
kstat.context_swtch++;
/*
* there are 3 processes which are affected by a context switch:
*
* prev == .... ==> (last => next)
*
* It's the 'much more previous' 'prev' that is on next's stack,
* but prev is set to (the just run) 'last' process by switch_to().
* This might sound slightly confusing but makes tons of sense.
*/
prepare_to_switch();
{
struct mm_struct *mm = next->mm;
struct mm_struct *oldmm = prev->active_mm;
if (!mm) {
if (next->active_mm) BUG();
next->active_mm = oldmm;
atomic_inc(&oldmm->mm_count);
enter_lazy_tlb(oldmm, next, this_cpu);
} else {
if (next->active_mm != mm) BUG();
switch_mm(oldmm, mm, next, this_cpu);
}
if (!prev->mm) {
prev->active_mm = NULL;
mmdrop(oldmm);
}
}
/*
* This just switches the register state and the
* stack.
*/
switch_to(prev, next, prev);
__schedule_tail(prev);
same_process:
reacquire_kernel_lock(current);
if (current->need_resched)
goto need_resched_back;
return;
recalculate:
{
struct task_struct *p;
spin_unlock_irq(&runqueue_lock);
read_lock(&tasklist_lock);
for_each_task(p)
p->counter = (p->counter >> 1) + NICE_TO_TICKS(p->nice);
read_unlock(&tasklist_lock);
spin_lock_irq(&runqueue_lock);
}
goto repeat_schedule;
still_running:
c = goodness(prev, this_cpu, prev->active_mm);
next = prev;
goto still_running_back;
handle_softirq:
do_softirq();
goto handle_softirq_back;
move_rr_last:
if (!prev->counter) {
prev->counter = NICE_TO_TICKS(prev->nice);
move_last_runqueue(prev);
}
goto move_rr_back;
scheduling_in_interrupt:
printk("Scheduling in interrupt\n");
BUG();
return;
}
相关代码修改:
1. 修改了对runquene的操作. 双向链表操作抽象在list.h中 , 提供各种接口
使用例子:
static inline void add_to_runqueue(struct task_struct * p)
{
list_add(&p->run_list, &runqueue_head);
nr_running++;
}
static inline void move_last_runqueue(struct task_struct * p)
{
list_del(&p->run_list);
list_add_tail(&p->run_list, &runqueue_head);
}
static inline void move_first_runqueue(struct task_struct * p)
{
list_del(&p->run_list);
list_add(&p->run_list, &runqueue_head);
}
2. reschedule_idle对多CPU做了更多的工作.
3. 添加异步唤醒接口, 唤醒后不去判断是否重新调度.
static inline void wake_up_process_synchronous(struct task_struct * p)
{
unsigned long flags;
/*
* We want the common case fall through straight, thus the goto.
*/
spin_lock_irqsave(&runqueue_lock, flags);
p->state = TASK_RUNNING;
if (task_on_runqueue(p))
goto out;
add_to_runqueue(p);
out:
spin_unlock_irqrestore(&runqueue_lock, flags);
}
4. 添加一系列唤醒接口, 可以根据不同的模式,选择CPU ,选择唤醒方式.
static inline void __wake_up_common (wait_queue_head_t *q, unsigned int mode,
unsigned int wq_mode, const int sync)
{
struct list_head *tmp, *head;
struct task_struct *p, *best_exclusive;
unsigned long flags;
int best_cpu, irq;
if (!q)
goto out;
best_cpu = smp_processor_id();
irq = in_interrupt();
best_exclusive = NULL;
wq_write_lock_irqsave(&q->lock, flags);
#if WAITQUEUE_DEBUG
CHECK_MAGIC_WQHEAD(q);
#endif
head = &q->task_list;
#if WAITQUEUE_DEBUG
if (!head->next || !head->prev)
WQ_BUG();
#endif
tmp = head->next;
while (tmp != head) {
unsigned int state;
wait_queue_t *curr = list_entry(tmp, wait_queue_t, task_list);
tmp = tmp->next;
#if WAITQUEUE_DEBUG
CHECK_MAGIC(curr->__magic);
#endif
p = curr->task;
state = p->state;
if (state & mode) {
#if WAITQUEUE_DEBUG
curr->__waker = (long)__builtin_return_address(0);
#endif
/*
* If waking up from an interrupt context then
* prefer processes which are affine to this
* CPU.
*/
if (irq && (curr->flags & wq_mode & WQ_FLAG_EXCLUSIVE)) {
if (!best_exclusive)
best_exclusive = p;
if (p->processor == best_cpu) {
best_exclusive = p;
break;
}
} else {
if (sync)
wake_up_process_synchronous(p);
else
wake_up_process(p);
if (curr->flags & wq_mode & WQ_FLAG_EXCLUSIVE)
break;
}
}
}
if (best_exclusive) {
if (sync)
wake_up_process_synchronous(best_exclusive);
else
wake_up_process(best_exclusive);
}
wq_write_unlock_irqrestore(&q->lock, flags);
out:
return;
}
void __wake_up(wait_queue_head_t *q, unsigned int mode, unsigned int wq_mode)
{
__wake_up_common(q, mode, wq_mode, 0);
}
void __wake_up_sync(wait_queue_head_t *q, unsigned int mode, unsigned int wq_mode)
{
__wake_up_common(q, mode, wq_mode, 1);
}
Linux V2.5
1. 不再大量的使用 goto , 作为替代对 if 使用 unlikely .
源码:
asmlinkage void schedule(void)
{
struct schedule_data * sched_data;
struct task_struct *prev, *next, *p;
struct list_head *tmp;
int this_cpu, c;
spin_lock_prefetch(&runqueue_lock);
if (!current->active_mm) BUG();
need_resched_back:
prev = current;
this_cpu = prev->processor;
if (unlikely(in_interrupt())) {
printk("Scheduling in interrupt\n");
BUG();
}
release_kernel_lock(prev, this_cpu);
/*
* 'sched_data' is protected by the fact that we can run
* only one process per CPU.
*/
sched_data = & aligned_data[this_cpu].schedule_data;
spin_lock_irq(&runqueue_lock);
/* move an exhausted RR process to be last.. */
if (unlikely(prev->policy == SCHED_RR))
if (!prev->counter) {
prev->counter = NICE_TO_TICKS(prev->nice);
move_last_runqueue(prev);
}
switch (prev->state) {
case TASK_INTERRUPTIBLE:
if (signal_pending(prev)) {
prev->state = TASK_RUNNING;
break;
}
default:
del_from_runqueue(prev);
case TASK_RUNNING:;
}
prev->need_resched = 0;
/*
* this is the scheduler proper:
*/
repeat_schedule:
/*
* Default process to select..
*/
next = idle_task(this_cpu);
c = -1000;
list_for_each(tmp, &runqueue_head) {
p = list_entry(tmp, struct task_struct, run_list);
if (can_schedule(p, this_cpu)) {
int weight = goodness(p, this_cpu, prev->active_mm);
if (weight > c)
c = weight, next = p;
}
}
/* Do we need to re-calculate counters? */
if (unlikely(!c)) {
struct task_struct *p;
spin_unlock_irq(&runqueue_lock);
read_lock(&tasklist_lock);
for_each_task(p)
p->counter = (p->counter >> 1) + NICE_TO_TICKS(p->nice);
read_unlock(&tasklist_lock);
spin_lock_irq(&runqueue_lock);
goto repeat_schedule;
}
/*
* from this point on nothing can prevent us from
* switching to the next task, save this fact in
* sched_data.
*/
sched_data->curr = next;
task_set_cpu(next, this_cpu);
spin_unlock_irq(&runqueue_lock);
if (unlikely(prev == next)) {
/* We won't go through the normal tail, so do this by hand */
prev->policy &= ~SCHED_YIELD;
goto same_process;
}
#ifdef CONFIG_SMP
/*
* maintain the per-process 'last schedule' value.
* (this has to be recalculated even if we reschedule to
* the same process) Currently this is only used on SMP,
* and it's approximate, so we do not have to maintain
* it while holding the runqueue spinlock.
*/
sched_data->last_schedule = get_cycles();
/*
* We drop the scheduler lock early (it's a global spinlock),
* thus we have to lock the previous process from getting
* rescheduled during switch_to().
*/
#endif /* CONFIG_SMP */
kstat.context_swtch++;
/*
* there are 3 processes which are affected by a context switch:
*
* prev == .... ==> (last => next)
*
* It's the 'much more previous' 'prev' that is on next's stack,
* but prev is set to (the just run) 'last' process by switch_to().
* This might sound slightly confusing but makes tons of sense.
*/
prepare_to_switch();
{
struct mm_struct *mm = next->mm;
struct mm_struct *oldmm = prev->active_mm;
if (!mm) {
if (next->active_mm) BUG();
next->active_mm = oldmm;
atomic_inc(&oldmm->mm_count);
enter_lazy_tlb(oldmm, next, this_cpu);
} else {
if (next->active_mm != mm) BUG();
switch_mm(oldmm, mm, next, this_cpu);
}
if (!prev->mm) {
prev->active_mm = NULL;
mmdrop(oldmm);
}
}
/*
* This just switches the register state and the
* stack.
*/
switch_to(prev, next, prev);
__schedule_tail(prev);
same_process:
reacquire_kernel_lock(current);
if (current->need_resched)
goto need_resched_back;
return;
}
相关函数修改:
1. 唤醒函数整合, 添加了参数有效性代码
static inline int try_to_wake_up(struct task_struct * p, int synchronous)
{
unsigned long flags;
int success = 0;
/*
* We want the common case fall through straight, thus the goto.
*/
spin_lock_irqsave(&runqueue_lock, flags);
p->state = TASK_RUNNING;
if (task_on_runqueue(p))
goto out;
add_to_runqueue(p);
if (!synchronous || !(p->cpus_allowed & (1 << smp_processor_id())))
reschedule_idle(p);
success = 1;
out:
spin_unlock_irqrestore(&runqueue_lock, flags);
return success;
}
inline int wake_up_process(struct task_struct * p)
{
return try_to_wake_up(p, 0);
}
oid __wake_up(wait_queue_head_t *q, unsigned int mode, int nr)
{
if (q) {
unsigned long flags;
wq_read_lock_irqsave(&q->lock, flags);
__wake_up_common(q, mode, nr, 0);
wq_read_unlock_irqrestore(&q->lock, flags);
}
}
void __wake_up_sync(wait_queue_head_t *q, unsigned int mode, int nr)
{
if (q) {
unsigned long flags;
wq_read_lock_irqsave(&q->lock, flags);
__wake_up_common(q, mode, nr, 1);
wq_read_unlock_irqrestore(&q->lock, flags);
}
}