How to choose Approximate Nearest Neighbors Searching Algorithms?
CV人可能比较了解Approximate Nearest Neighbors Searching Algorithms(ANN)吧,因为打得交道实在是太多了。不管是Image matching/Image retrieval/Image stitching/Image recognition,最后一步总是NN searching。这一周被各种NN searching折磨着,总算有些心得体会,希望大家一起来讨论。
1.实例说明ANN的魅力
图1
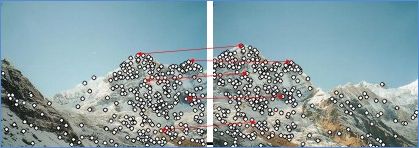
图2
图1是利用pLSA进行图像分类时利用Vocabulary Tree生成Document Vector的过程,利用到了ANN;
图2是图像拼接过程中对应点匹配的问题,利用到了ANN。
2.Search Algorithms

图3
由图3,Linear search就是线性搜索,即把query point与dataset里面的所有值进行比较,直到选出比较满意的对应点停止。这种方法只能处理规模比较小的数据库,要不然时间复杂度会很高。同时,NN的方法主要包含三种:K-means tree、KD-tree和LSH(locally senstive hashing),在这里我们主要讨论前两种方法。
3.KD-tree
KD-tree是K dimensional tree的缩写,K表明tree里面所有的节点都是K维的。
KD-tree的发展史如图4所示:KD-tree -> BBF KD-tree -> Multiple randomized KD-tree
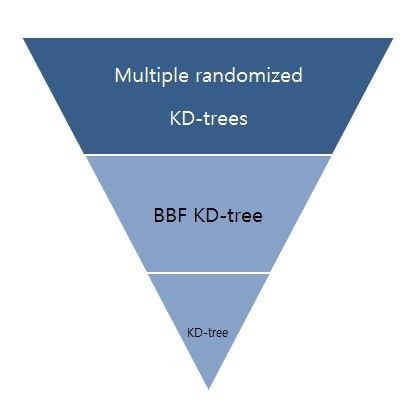
图4
3.1 KD-tree
KD-tree是一种二叉树,所以它的分支只有两个。图5是它的形成过程。
图5
具体的形成过程,我就不写了,请参考博客 http://blog.csdn.net/v_july_v/article/details/8203674,这篇博客可以说是我看到写的最好的了。
3.2 BBF KD-tree
这才是我要讲的重点,我看了很多博客,感觉写的都不是很明白,所以我希望自己可能写的比较清楚(有错误的话,欢迎拍砖,但要轻拍![]() )
)

图6
图6左边是最原始的KD-tree方法。假设我们要搜素(2,4.5)点 我们说的路径是PATH 1,即找到了(4,7)点(1st candidate),然后根据KD-tree的算法原理,我们需要把backtrack,首先到(5,4)点,发现查找点与(5,4)的距离反而小,然后以查找点为圆心,query point与(5,4)的距离为半径画圆,我们发现在这个圆的范围内存在(2,3)点,所以(2,3)为2nd candidate,然后回溯到(5,4)点,最后回溯到根节点。
而BBF KD-tree与KD-tree最大的区别有两个:
第一:BBF建立了优先队列(priority queue),回溯的时候只考虑优先队列;
第二:BBF提出停止查找的两个条件——优先队列为空或者查找次数(# node search)超过我们设定的阈值(predetermined number)。
下面就要讨论本文最有意思的部分:如何建立优先队列???
首先说明的是,BBF中优先队列是在查找过程中建立的,与查找同时进行。如图6右下方所示。
第一步:把根节点放到优先队列中,此时优先队列有(7,2)一项;
第二步:在查找过程时,取出(7,2),因为(7,2)是暂时放入优先队列的根节点。
第三步:走到了(5,4)点,与此同时把同一个父节点没有被查询的点放入优先队列,即(9,6)被放入优先队列【此时(9,6)距其父节点的距离为2,我们只考虑X方向上的】。此时我们只知道(7,2)与查询点的距离,此时离查询点最近的是(7,2);
第四步:走到了(4,7)点,同时把(2,3)放入优先队列【(2,3)与其父节点的距离为1,我们只考虑Y方向上的】。通过比较(5,4)与(7,2)和查询点的距离,我们发现此时离查询点最近的是(5,4);
第五步:开始回溯,把优先级别高【与父节点的距离越近的,优先级别越高】的(2,3)从优先队列中提出。通过比较(2,3)与(5,4)和查询点的距离,我们发现此时离查询点最近的是(2,3);
第六步:把优先队列中已经进行比较的(2,3)点拿出,计算(9,6)与查询点的距离。通过比较(9,6)与(2,3)和查询点的距离,我们发现此时离查询点最近的是(2,3);
第七步:取出(9,6),此时优先队列为空,停止查找。
图7
从图7我们可以看出,在数据维数小于23的空间,Kd-tree的检索速度更快;但实际中的数据往往都是高维的,BBF使得KD-tree可以用在高维空间,而且从时间复杂度看比KD-tree更有效。
上图来自于Shape Indexing Using Approximate Nearest-Neighbor Search in High-Dimensional Spaces --Jeffrey S.Beis andDavid G. Lowe
3.3 Multiple randomized KD-tree
图8
在这我简单介绍一下multiple randomized KD-tree,想了解详情的请参考论文:OptimizedKD-trees for fast image descriptor matching--Silpa Anan & Hartley
“Multiple”说明树的个数不止一个。同一个dataset形成独立的不同结构trees;
“randomized”是相对于KD-tree选择split dimension的方法而言的。KD-tree中通过选择对应于最大variance的那个维作为分割维数;在这,因为高维空间的维数实在太大,要是一一计算每一位相对应的方差,实在是个力气活。科学家都是懒人,所以他们从K多维中随机选取了D维(本文中D=5),通过计算这D维中中的方差,选择最大方差对应的维作为分割维数。
从上图中我们发现不能建太多的树,大概在20个树左右效果最好,多于这个数目,可能效果反而变差,而且建树也需要大量时间。
4.K-means tree
4.1 K-means tree
因为这个比较常见,大家可以参考这篇博文: http://www.csdn.net/article/2012-07-03/2807073-k-means
在这里面有DEMO http://home.deib.polimi.it/matteucc/Clustering/tutorial_html/AppletKM.html
强调一点——这的K是聚类数,也可以认为是分枝数。
4.2 Hierarchical K-means tree (vocabulary tree)
有兴趣的同学可以参考这篇论文: ScalableRecognition with a Vocabulary Tree--DavidNister,HenrikStewenius
感慨一下:大牛就是大牛,文思如泉涌。
下面我们来看一下,影响hierarchical k-means tree的因素有两个:分枝树和迭代次数。

我们从图中可以看出,当迭代此时在7的时候,它的效果已经非常好了。随着迭代次数的增加,效果提升一点,但却要牺牲很多的时间。所以,我们一定要控制迭代的次数。
5 如何选择ANN算法
终于到这了,感觉写博客是力气活啊,不适合小女生。话说工科女是不是都是外表柔弱内心强大啊~
影响算法performance的因素很多,例如:datas的结构和特点。其中每个算法还有很多的parameters,从另一个角度看,这就相当于在参数空间求极值的问题。
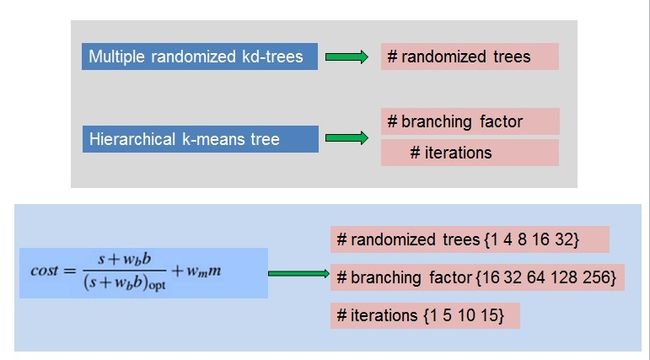
这篇文章Fast Approximate Nearest Neighbors with Automatic Algorithm Configuration最大的贡献之一就是建立了这么一个cost的目标方程。而我们的目标就是在参数空间内最小化cost方程。
简单介绍一下cost方程:
s:searching time,搜索树的时间;
b:building time,建树的时间;
m:memory,内存;
w表示对应的权重。
可见cost分为两部分,time overhead和memory overhead。
两步走:
第一步,根据大量实验经验,对参数空间进行取样;
第二步,利用单纯形法,从取样空间选出最优的那个参数值。
6.结果

结果1
我们分析一下:红框表示在建树时间和内存占有的权重最大的时候,我们要采用single KD-tree方法,因为它最容易建立而且在内存上比较有效率;绿框表示在建树时间和内存占有的权重最小的时候,我们要采用k-means方法。纵向比较,当要达到较高的精度时,我们要多分枝,但是迭代次数要保证在一定的范围内。

结果2
从结果图2(a),我们可以发现k-means和KD-tree比现有的LSH,ANN的效果好(这里的ANN是指k-means/kd-tree的原始版本);
(b),我们发现在一定的精度下,我们的算法在速度上可以是线性搜索的3个数量级,也就是时间是线性搜索的千分之一这样,但是要想达到几乎完美的搜索,时间上也要消耗很多;
(c),这个dataset比较特别,有一个几乎完全能matching点的数据集,采自于进行image stitching的overlapping 区域,有一个是几乎不能匹配的数据集,这个比较好解决,不多说。
我们发现,ran.KD-tree的效果比kmeans好,也就是说如果我们的query image和women的dataset有一种联系,例如transformed的关系,我们采用ran.KD-tree;
(d),在数据集的本征维数小于实际维数的情况下,ran.KD-tree的效果比较好。
7.FLANN
这个我还没用,过两天贴感受。现在去吃饭,饿死啦啦啦啦啦~~