机器学习系列05——决策树(Decision tree)
决策树(Decision tree)
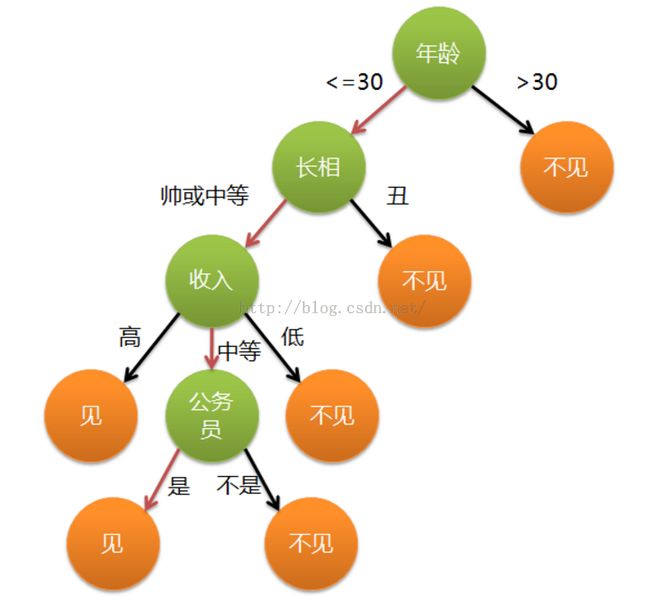
1、引入
2、定义
3、决策树的构造
不同于贝叶斯算法,决策树的构造过程不依赖领域知识,它使用属性选择度量来选择将元组最好地划分成不同的类的属性。所谓决策树的构造就是进行属性选择度量确定各个特征属性之间的拓扑结构。
构造决策树的关键步骤是分裂属性。所谓分裂属性就是在某个节点处按照某一特征属性的不同划分构造不同的分支,其目标是让各个分裂子集尽可能地“纯”。尽可能“纯”就是尽量让一个分裂子集中待分类项属于同一类别。分裂属性分为三种不同的情况:1、属性是离散值且不要求生成二叉决策树。此时用属性的每一个划分作为一个分支。
2、属性是离散值且要求生成二叉决策树。此时使用属性划分的一个子集进行测试,按照“属于此子集”和“不属于此子集”分成两个分支。
3、属性是连续值。此时确定一个值作为分裂点split_point,按照>split_point和<=split_point生成两个分支。构造决策树的关键性内容是进行属性选择度量,属性选择度量是一种选择分裂准则,是将给定的类标记的训练集合的数据划分D“最好”地分成个体类的启发式方法,它决定了拓扑结构及分裂点split_point的选择。
属性选择度量算法有很多,一般使用 自顶向下递归分治法,并采用 不回溯的贪心策略。这里介绍ID3和C4.5两种常用算法。4、ID3算法
4.1、信息论——熵
4.2、条件熵

4.3、信息增益
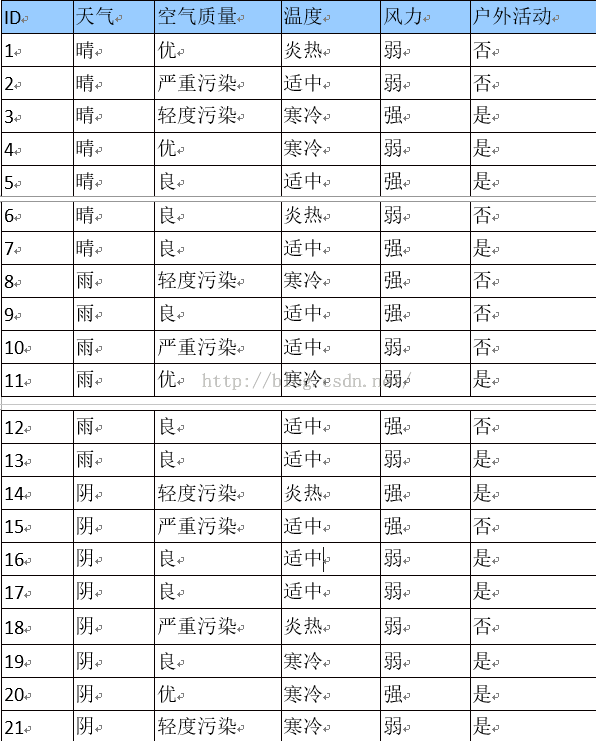
信息增益表示得知特征X(天气)的信息使得类Y(进行户外活动或取消活动)的信息的不确定性减少程度。
特征A对训练数据集D的信息增益g(D,A),定义为集合D的经验熵H(D)与特征A给定条件下的经验条件熵H(D|A)之差,即熵H(Y)与条件熵H(Y|X)之差称为互信息,即g(D,A)
信息增益大表明信息多,信息增多,则不确定性就越小。
4.4、ID3思想
ID3算法的核心是在决策树各个子结点上应用信息增益准则选择特征,递归的构建决策树。
具体方法是:从根结点开始,对结点计算所有可能的特征的信息增益,选择信息增益最大的特征作为结点的特征,由该特征的不同取值建立子结点;再对子结点递归调用以上方法,构建决策树。直到所有特征的信息增益均很小或没有特征可以选择为止。
4.5、ID3算法实例

其中s、m和l分别表示小、中和大。
设L、F、H和R表示日志密度、好友密度、是否使用真实头像和账号是否真实,下面计算各属性的信息增益。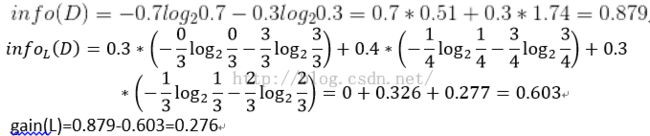
用同样方法得到H和F的信息增益分别为0.033和0.553。
因为F具有最大的信息增益,所以第一次分裂选择F为分裂属性,分裂后的结果如下图表示: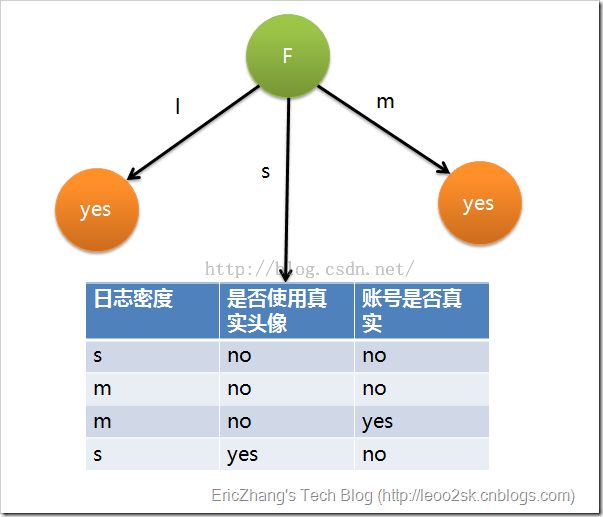
在上图的基础上,再递归使用这个方法计算子节点的分裂属性,最终就可以得到整个决策树。
上面为了简便,将特征属性离散化了,其实日志密度和好友密度都是连续的属性。对于特征属性为连续值,可以如此使用ID3算法:
先将D中元素按照特征属性排序,则每两个相邻元素的中间点可以看做潜在分裂点,从第一个潜在分裂点开始,分裂D并计算两个集合的期望信息,具有最小期望信息的点称为这个属性的最佳分裂点,其信息期望作为此属性的信息期望。5、C4.5算法


6、CART算法
分类回归树(CART,Classification And Regression Tree)其核心思想与ID3和C4.5相同,主要的不同处在于CART在每一个节点上都采用二分法,即每个节点都只能有两个子节点,最后构成的是二叉树。
CART树由两步组成:
(1)决策树的生成:基于训练数据集生成决策树;
(2)决策树的剪枝:对生成的树进行剪枝并选择最优子树。6.1、基尼指数
CART分类树通常采用基尼指数(GINI)选择最优特征,同时决定该特征的最优二值切分点。总体内包含的类别越杂乱,GINI指数就越大(跟熵的概念很相似)。
分类问题中,假设有k个类,样本点属于第i类的概率为pi,则基尼指数定义为
6.2、CART生成树





只有一个切分点,所以它们就是最优切分点。
求A4的基尼指数:在A1,A2,A3, A4几个特征中,找最小的基尼指数。
选A3=1作为最优的切分点,即根结点。生成两个子结点,一个为叶结点,另外一个按照类似于ID3的过程,递归再选最优切分点,直到划分完成。6.3、CART剪枝
当CART树划分得太细时,会对噪声数据产生过拟合作用。因此我们要通过剪枝来解决。剪枝又分为前剪枝和后剪枝。
前剪枝是指在构造树的过程中就知道哪些节点可以剪掉,于是干脆不对这些节点进行分裂。
后剪枝是指构造出完整的决策树之后再来考查哪些子树可以剪掉。
CART剪枝算法从“完全生长”的决策树的底端剪去一些子树,使决策树变小(模型变简单),从而能够对未知数据有更准确的预测。
CART树中的每一个非叶子节点的表面误差率增益值α(误差增加的速率,越小越好)
r(t)是节点t的误差率;
p(t)是节点t上的数据占所有数据的比例;