ARM寄存器介绍
转自http://blog.sina.com.cn/s/blog_491f02870100hxna.html
ARM处理器模式
用户模式(User):ARM处理器正常的程序执行状态
快速中断模式(FIQ):用于高速数据传输或通道处理
外部中断模式(IRQ):用于通用的中断处理
管理模式(Supervisor):操作系统使用的保护模式
数据访问终止模式(Abort):当数据或指令预取终止时进入该模式,可用于虚拟存储及存储保护
系统模式(System):运行具有特权的操作系统任务
未定义指令中止模式(Undifined):当未定义的指令执行时进入该模式,可用于支持硬件协处理器的软件仿真
ARM寄存器
ARM共有37个32位寄存器,其中31个为通用寄存器,6个为状态寄存器.这些寄存器不能被同时访问,但在任何时候,通用寄存器R0~R14,程序计数器PC,一个或两个状态寄存器都是可访问的.
通用寄存器
通用寄存器包括R0~R15,可以分为3类:
(1)未分组寄存器R0~R7
(2)分组寄存器R8~R14
(3)程序计数器PC(R15)
1.未分组寄存器R0~R7
在所有运行模式下,未分组寄存器都指向同一个物理寄存器,它们未被系统用作特殊的用途.因此在中断或异常处理进行运行模式转换时,由于不同的处理器运行模式均使用相同的物理寄存器,所以可能造成寄存器中数据的破坏.
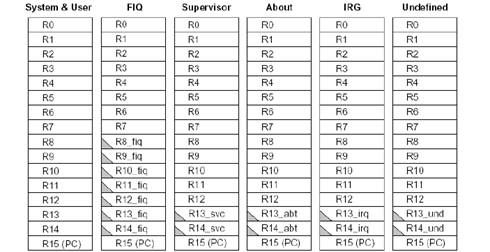
2.分组寄存器R8~R14
对于分组寄存器,它们每一次所访问的物理寄存器都与当前处理器的运行模式有关.对于R8~R12来说,每个寄存器对应2个不同的物理寄存器,当使用FIQ(快速中断模式)时,访问寄存器R8_fiq~R12_fiq;当使用除FIQ模式以外的其他模式时,访问寄存器R8_usr~R12_usr.
对于R13,R14来说,每个寄存器对应6个不同的物理寄存器,其中一个是用户模式与系统模式共用,另外5个物理寄存器对应其他5种不同的运行模式,并采用以下记号来区分不同的物理寄存器:
R13_mode
R14_mode
其中mode可为:usr,fiq,irq,svc,abt,und.
寄存器R13在ARM指令中常用作堆栈指针,用户也可使用其他的寄存器作为堆栈指针,而在Thumb指令集中,某些指令强制性的要求使用R13作为堆栈指针.
寄存器R13在ARM指令中常用作堆栈指针,但这只是一种习惯用法,用户也可使用其他的寄存器作为堆栈指针。而在Thumb指令集中,某些指令强制性的要求使用R13作为堆栈指针。
由于处理器的每种运行模式均有自己独立的物理寄存器R13,在用户应用程序的初始化部分,一般都要初始化每种模式下的R13,使其指向该运行模式的栈空间。这
样,当程序的运行进入异常模式时,可以将需要保护的寄存器放入R13所指向的堆栈,而当程序从异常模式返回时,则从对应的堆栈中恢复,采用这种方式可以保证异常发生后程序的正常执行。
R14称为链接寄存器(Link Register),当执行子程序调用指令(BL)时,R14可得到R15(程序计数器PC)的备份.
在每一种运行模式下,都可用R14保存子程序的返回地址,当用BL或BLX指令调用子程序时,将PC的当前值复制给R14,执行完子程序后,又将R14的值复制回PC,即可完成子程序的调用返回。以上的描述可用指令完成。
执行以下任意一条指令:
MOV PC, LR
BX LR
在子程序入口处使用以下指令将R14存入堆栈:
STMFD SP!,{,LR}
对应的,使用以下指令可以完成子程序返回:
LDMFD SP!,{,PC}
R14也可作为通用寄存器。
3,程序计数器PC(R15)
寄存器R15用作程序计数器(PC),在ARM状态下,位[1:0]为0,位[31:2]用于保存PC,在Thumb状态下,位[0]为0,位[31:1]用于保存PC.
由于ARM体系结构采用了多级流水线技术,对于ARM指令集而言,PC总是指向当前指令的下两条指令的地址,即PC的值为当前指令的地址值加8个字节
程序状态寄存器
4,寄存器R16
寄存器R16用作CPSR(Current
Program Status Register,当前程序状态寄存器),CPSR可在任何运行模式下被访问,它包括条件标志位、中断禁止位、当前处理器模式标志位,以及其他一些相关的控制和状态位。
每一种运行模式下又都有一个专用的物理状态寄存器,称为SPSR(Saved Program Status Register,备份的程序状态寄存器),当异常发生时,SPSR用于保存CPSR的当前值,从异常退出时则可由SPSR来恢复CPSR。
由于用户模式和系统模式不属于异常模式,它们没有SPSR,当在这两种模式下访问SPSR,结果是未知的

| 31 | 30 | 29 | 28 | 27 | ~ | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |||
| N | Z | C | V | 保留 | I | F | T | M4 | M3 | M2 | M1 | M0 | |||||
| N | Negative(负的)/Less Than | I | IRQ disable | ||||||||||||||
| Z | Zero | F | FIQ disable | ||||||||||||||
| C | Carry/Borrow/Extend | T | State bit | ||||||||||||||
| V | Overflow | M0~4 | Mode bits | ||||||||||||||
1).条件码标志(condition code flags)
N,Z,C,V均为条件码标志位,它们的内容可被算术或逻辑运算的结果所改变,并且可以决定某条指令是否被执行.
在ARM状态下,绝大多数的指令都是有条件执行的,在Thumb状态下,仅有分支指令是有条件执行的.
N(Number):当用两个补码表示的带符号数进行运行时,N=1表示运行结果为负,N=0表示运行结果为正或零
Z:(Zero):Z=1表示运算结果为零,Z=0表示运行结果非零
C:(Come)加法运算:当运算结果产生了进位时C=1,否则C=0
减法运算:当运算产生了借位,C=0否则C=1
对于包含移位操作的非加/减运算指令 ,C为移出值的最后一位
对于其他的非加/减运算指令C的值通常不改变
V:(oVerflow)对于加/减法运算指令,当操作数和运算结果为二进制的被码表示的带符注意力时,V=1表示符号位溢出.对于其他的非加/减运算指令V的值通常不改变
2).控制位
PSR的低8位(包括I,F,T和M[4:0])称为控制位,当发生异常时这些位可以被改变,如果处理器运行特权模式,这些位也可以由程序修改.
(1)中断禁止位I,F
I=1 禁止IRQ中断
F=1 禁止FIQ中断
每一种运行模式下又都有一个专用的物理状态寄存器称为SPSR(Saved Program Status Register,备份的程序状态寄存器)当异常发生时,SPSR可以保存CPSR的当前值,从异常退出时则可由SPSR来恢复CPSR.
由于用户模式和系统模式不属于异常模式,它们没有SPSR当在这两种模式下访问SPSR时结果是未知的
Thumb状态下程序可以直接访问8个通用寄存器(R0~R7),程序计数器(PC),堆栈指针(SP:StackPointer),链接寄存器(LP:Link Register)和CPSR,同时在每一种特权模式下都有一组SP,LR和SPSR.
ARM指令导址方式
1.立即寻址(立即数寻址)
ADD R0,R0,#1 //R0<-R0+1
ADD R0,R0,#0x31 //R0<-R0+0x3f
立即数以"#"为前缀,对于以十六进制表示的立即数,还要求在"#"后加上"0x"前缀
2.寄存器寻址
ADD R0,R1,R2 //R0<-R1+R2
3.寄存器间接寻址
ADD R0,R1,[R2] //R0<-R1+[R2]
LDR R0,[R1] //R0<-[R1]
STR R0,[R1] //[R1]<-R0
4.基址变址寻址
LDR R0,[R1,#4] //R0<-[R1+4]
LDR R0,[R1,#4]! //R0<-[R1+4],R1<-R1+4
LDR R0,[R1,R2] //R0<-[R1+R2]
5.多寄存器寻址
LDMIA R0,[R1,R2,R3,R4] //R1<-[R0],R2<-[R0+4],R3<-[R0+8],R4<-[R0+12]
6.相对寻址
BL NEXT //跳转到子程序NEXT处执行
......
NEXT
....
MOV PC,LR //从子程序返回