AllJoyn+C++开发案例-windows跨设备调用方法
AllJoyn+C++开发案例-windows跨设备调用方法
按照上一篇的AllJoyn+Android开发案例-android跨设备调用方法中,步骤二-开始着手windows间的跨平台方法例程的编写。具体参考上一篇:http://blog.csdn.net/jsjdtb356/article/details/51179564。
不同于java,windows编程的api core官网并没有给出介绍,如下图,地址:https://allseenalliance.org/framework/documentation/develop/api-guide/core。
无奈再去找building下关于windows的介绍,地址:
https://allseenalliance.org/framework/documentation/develop/building/windows/build-source,主要说的都是一些工具
VS,python,junit,scons等等,最后才有一些关于运行测试实例的话,基本没有什么帮助。然后去下载地址下载了
Windows SDK(64bit)VS2012版本的包。解压后的文件目录如下:
注意我红色框出来的部分,解压后会有两个版本出来,一个是release版,一个debug版,在后面VS调试时,会有区分的。然后我再cpp包下bin中的samples实例中,去找了实例chat来运行,可以实现不同window设备之间的相互聊天。然后问题来了,就是如何自己实现一个alljoyn的实例。我参考的是cpp下的sample下的basic中的源码实例,basic源码实例中也是包含了,一个server和一个client,然后client去调用server的方法。
下面我先直接贴上server和client的源码,大家先看server和client的main方法,对过程有个大致认识。我的理解是实现过程和android端过程基本相同,在总线接口的实现方面不同,C++用了InterfaceDescription这样一个接口描述类来帮助接口的实现。
server源码:
#include <qcc/platform.h>
#include <assert.h>
#include <signal.h>
#include <stdio.h>
#include <vector>
#include <qcc/String.h>
#include <alljoyn/AllJoynStd.h>
#include <alljoyn/BusAttachment.h>
#include <alljoyn/BusObject.h>
#include <alljoyn/DBusStd.h>
#include <alljoyn/Init.h>
#include <alljoyn/MsgArg.h>
#include <alljoyn/version.h>
#include <alljoyn/Status.h>
using namespace std;
using namespace qcc;
using namespace ajn;
/*constants*/
static const char* INTERFACE_NAME = "org.alljoyn.Bus.sample";
static const char* SERVICE_NAME = "org.alljoyn.Bus.sample";
static const char* SERVICE_PATH = "/sample";
static const SessionPort SERVICE_PORT = 25;
static volatile sig_atomic_t s_interrupt = false;
static void CDECL_CALL SigIntHandler(int sig)
{
QCC_UNUSED(sig);
s_interrupt = true;
}
class BasicSampleObject : public BusObject {
public:
BasicSampleObject(BusAttachment& bus, const char* path) :
BusObject(path)
{
/** Add the test interface to this object */
const InterfaceDescription* exampleIntf = bus.GetInterface(INTERFACE_NAME);
assert(exampleIntf);
AddInterface(*exampleIntf);
/** Register the method handlers with the object */
const MethodEntry methodEntries[] = {
{ exampleIntf->GetMember("cat"), static_cast<MessageReceiver::MethodHandler>(&BasicSampleObject::Cat) }
};
QStatus status = AddMethodHandlers(methodEntries, sizeof(methodEntries) / sizeof(methodEntries[0]));
if (ER_OK != status) {
printf("Failed to register method handlers for BasicSampleObject.\n");
}
}
void ObjectRegistered()
{
BusObject::ObjectRegistered();
printf("ObjectRegistered has been called.\n");
}
void Cat(const InterfaceDescription::Member* member, Message& msg)
{
QCC_UNUSED(member);
/* Concatenate the two input strings and reply with the result. */
qcc::String inStr1 = msg->GetArg(0)->v_string.str;
qcc::String inStr2 = msg->GetArg(1)->v_string.str;
qcc::String outStr = inStr1 + inStr2;
MsgArg outArg("s", outStr.c_str());
QStatus status = MethodReply(msg, &outArg, 1);
if (ER_OK != status) {
printf("Ping: Error sending reply.\n");
}
}
};
class MyBusListener : public BusListener, public SessionPortListener {
void NameOwnerChanged(const char* busName, const char* previousOwner, const char* newOwner)
{
if (newOwner && (0 == strcmp(busName, SERVICE_NAME))) {
printf("NameOwnerChanged: name=%s, oldOwner=%s, newOwner=%s.\n",
busName,
previousOwner ? previousOwner : "<none>",
newOwner ? newOwner : "<none>");
}
}
bool AcceptSessionJoiner(SessionPort sessionPort, const char* joiner, const SessionOpts& opts)
{
if (sessionPort != SERVICE_PORT) {
printf("Rejecting join attempt on unexpected session port %d.\n", sessionPort);
return false;
}
printf("Accepting join session request from %s (opts.proximity=%x, opts.traffic=%x, opts.transports=%x).\n",
joiner, opts.proximity, opts.traffic, opts.transports);
return true;
}
};
/** The bus listener object. */
static MyBusListener s_busListener;
/** Top level message bus object. */
static BusAttachment* s_msgBus = NULL;
/** Create the interface, report the result to stdout, and return the result status. */
QStatus CreateInterface(void)
{
/* Add org.alljoyn.Bus.method_sample interface */
InterfaceDescription* testIntf = NULL;
QStatus status = s_msgBus->CreateInterface(INTERFACE_NAME, testIntf);
if (status == ER_OK) {
printf("Interface created.\n");
testIntf->AddMethod("cat", "ss", "s", "inStr1,inStr2,outStr", 0);
testIntf->Activate();
} else {
printf("Failed to create interface '%s'.\n", INTERFACE_NAME);
}
return status;
}
/** Register the bus object and connect, report the result to stdout, and return the status code. */
QStatus RegisterBusObject(BasicSampleObject* obj)
{
QStatus status = s_msgBus->RegisterBusObject(*obj);
if (ER_OK == status) {
printf("RegisterBusObject succeeded.\n");
} else {
printf("RegisterBusObject failed (%s).\n", QCC_StatusText(status));
}
return status;
}
/** Connect, report the result to stdout, and return the status code. */
QStatus ConnectBusAttachment(void)
{
QStatus status = s_msgBus->Connect();
if (ER_OK == status) {
printf("Connect to '%s' succeeded.\n", s_msgBus->GetConnectSpec().c_str());
} else {
printf("Failed to connect to '%s' (%s).\n", s_msgBus->GetConnectSpec().c_str(), QCC_StatusText(status));
}
return status;
}
/** Start the message bus, report the result to stdout, and return the status code. */
QStatus StartMessageBus(void)
{
QStatus status = s_msgBus->Start();
if (ER_OK == status) {
printf("BusAttachment started.\n");
} else {
printf("Start of BusAttachment failed (%s).\n", QCC_StatusText(status));
}
return status;
}
/** Create the session, report the result to stdout, and return the status code. */
QStatus CreateSession(TransportMask mask)
{
SessionOpts opts(SessionOpts::TRAFFIC_MESSAGES, false, SessionOpts::PROXIMITY_ANY, mask);
SessionPort sp = SERVICE_PORT;
QStatus status = s_msgBus->BindSessionPort(sp, opts, s_busListener);
if (ER_OK == status) {
printf("BindSessionPort succeeded.\n");
} else {
printf("BindSessionPort failed (%s).\n", QCC_StatusText(status));
}
return status;
}
/** Advertise the service name, report the result to stdout, and return the status code. */
QStatus AdvertiseName(TransportMask mask)
{
QStatus status = s_msgBus->AdvertiseName(SERVICE_NAME, mask);
if (ER_OK == status) {
printf("Advertisement of the service name '%s' succeeded.\n", SERVICE_NAME);
} else {
printf("Failed to advertise name '%s' (%s).\n", SERVICE_NAME, QCC_StatusText(status));
}
return status;
}
/** Request the service name, report the result to stdout, and return the status code. */
QStatus RequestName(void)
{
const uint32_t flags = DBUS_NAME_FLAG_REPLACE_EXISTING | DBUS_NAME_FLAG_DO_NOT_QUEUE;
QStatus status = s_msgBus->RequestName(SERVICE_NAME, flags);
if (ER_OK == status) {
printf("RequestName('%s') succeeded.\n", SERVICE_NAME);
} else {
printf("RequestName('%s') failed (status=%s).\n", SERVICE_NAME, QCC_StatusText(status));
}
return status;
}
/** Wait for SIGINT before continuing. */
void WaitForSigInt(void)
{
while (s_interrupt == false) {
#ifdef _WIN32
Sleep(100);
#else
usleep(100 * 1000);
#endif
}
}
/** Main entry point */
int CDECL_CALL main(int argc, char** argv, char** envArg)
{
QCC_UNUSED(argc);
QCC_UNUSED(argv);
QCC_UNUSED(envArg);
if (AllJoynInit() != ER_OK) {
return 1;
}
#ifdef ROUTER
if (AllJoynRouterInit() != ER_OK) {
AllJoynShutdown();
return 1;
}
#endif
printf("AllJoyn Library version: %s.\n", ajn::GetVersion());
printf("AllJoyn Library build info: %s.\n", ajn::GetBuildInfo());
/* Install SIGINT handler */
signal(SIGINT, SigIntHandler);
QStatus status = ER_OK;
BasicSampleObject* testObj = NULL;
/* Create message bus */
s_msgBus = new BusAttachment("myApp", true);
if (s_msgBus) {
if (ER_OK == status) {
status = CreateInterface();
}
if (ER_OK == status) {
s_msgBus->RegisterBusListener(s_busListener);
}
if (ER_OK == status) {
status = StartMessageBus();
}
testObj = new BasicSampleObject(*s_msgBus, SERVICE_PATH);
if (ER_OK == status) {
status = RegisterBusObject(testObj);
}
if (ER_OK == status) {
status = ConnectBusAttachment();
}
/*
* Advertise this service on the bus.
* There are three steps to advertising this service on the bus.
* 1) Request a well-known name that will be used by the client to discover
* this service.
* 2) Create a session.
* 3) Advertise the well-known name.
*/
if (ER_OK == status) {
status = RequestName();
}
const TransportMask SERVICE_TRANSPORT_TYPE = TRANSPORT_ANY;
if (ER_OK == status) {
status = CreateSession(SERVICE_TRANSPORT_TYPE);
}
if (ER_OK == status) {
status = AdvertiseName(SERVICE_TRANSPORT_TYPE);
}
/* Perform the service asynchronously until the user signals for an exit. */
if (ER_OK == status) {
WaitForSigInt();
}
} else {
status = ER_OUT_OF_MEMORY;
}
/* Clean up */
delete s_msgBus;
s_msgBus = NULL;
delete testObj;
testObj = NULL;
printf("Basic service exiting with status 0x%04x (%s).\n", status, QCC_StatusText(status));
#ifdef ROUTER
AllJoynRouterShutdown();
#endif
AllJoynShutdown();
return (int) status;
}
client源码:
#include <qcc/platform.h>
#include <assert.h>
#include <signal.h>
#include <stdio.h>
#include <vector>
#include <qcc/String.h>
#include <alljoyn/AllJoynStd.h>
#include <alljoyn/BusAttachment.h>
#include <alljoyn/Init.h>
#include <alljoyn/Status.h>
#include <alljoyn/version.h>
using namespace std;
using namespace qcc;
using namespace ajn;
/** Static top level message bus object */
static BusAttachment* g_msgBus = NULL;
/*constants*/
static const char* INTERFACE_NAME = "org.alljoyn.Bus.sample";
static const char* SERVICE_NAME = "org.alljoyn.Bus.sample";
static const char* SERVICE_PATH = "/sample";
static const SessionPort SERVICE_PORT = 25;
static bool s_joinComplete = false;
static String s_sessionHost;
static SessionId s_sessionId = 0;
static volatile sig_atomic_t s_interrupt = false;
static void CDECL_CALL SigIntHandler(int sig)
{
QCC_UNUSED(sig);
s_interrupt = true;
}
/** AllJoynListener receives discovery events from AllJoyn */
class MyBusListener : public BusListener, public SessionListener {
public:
void FoundAdvertisedName(const char* name, TransportMask transport, const char* namePrefix)
{
if (0 == strcmp(name, SERVICE_NAME) && s_sessionHost.empty()) {
printf("FoundAdvertisedName(name='%s', transport = 0x%x, prefix='%s')\n", name, transport, namePrefix);
/* We found a remote bus that is advertising basic service's well-known name so connect to it. */
/* Since we are in a callback we must enable concurrent callbacks before calling a synchronous method. */
s_sessionHost = name;
g_msgBus->EnableConcurrentCallbacks();
SessionOpts opts(SessionOpts::TRAFFIC_MESSAGES, false, SessionOpts::PROXIMITY_ANY, TRANSPORT_ANY);
QStatus status = g_msgBus->JoinSession(name, SERVICE_PORT, this, s_sessionId, opts);
if (ER_OK == status) {
printf("JoinSession SUCCESS (Session id=%d).\n", s_sessionId);
} else {
printf("JoinSession failed (status=%s).\n", QCC_StatusText(status));
}
s_joinComplete = true;
}
}
void NameOwnerChanged(const char* busName, const char* previousOwner, const char* newOwner)
{
if (newOwner && (0 == strcmp(busName, SERVICE_NAME))) {
printf("NameOwnerChanged: name='%s', oldOwner='%s', newOwner='%s'.\n",
busName,
previousOwner ? previousOwner : "<none>",
newOwner ? newOwner : "<none>");
}
}
};
/** Create the interface, report the result to stdout, and return the result status. */
QStatus CreateInterface(void)
{
/* Add org.alljoyn.Bus.method_sample interface */
InterfaceDescription* testIntf = NULL;
QStatus status = g_msgBus->CreateInterface(INTERFACE_NAME, testIntf);
if (status == ER_OK) {
printf("Interface '%s' created.\n", INTERFACE_NAME);
testIntf->AddMethod("cat", "ss", "s", "inStr1,inStr2,outStr", 0);
testIntf->Activate();
} else {
printf("Failed to create interface '%s'.\n", INTERFACE_NAME);
}
return status;
}
/** Start the message bus, report the result to stdout, and return the result status. */
QStatus StartMessageBus(void)
{
QStatus status = g_msgBus->Start();
if (ER_OK == status) {
printf("BusAttachment started.\n");
} else {
printf("BusAttachment::Start failed.\n");
}
return status;
}
/** Handle the connection to the bus, report the result to stdout, and return the result status. */
QStatus ConnectToBus(void)
{
QStatus status = g_msgBus->Connect();
if (ER_OK == status) {
printf("BusAttachment connected to '%s'.\n", g_msgBus->GetConnectSpec().c_str());
} else {
printf("BusAttachment::Connect('%s') failed.\n", g_msgBus->GetConnectSpec().c_str());
}
return status;
}
/** Register a bus listener in order to get discovery indications and report the event to stdout. */
void RegisterBusListener(void)
{
/* Static bus listener */
static MyBusListener s_busListener;
g_msgBus->RegisterBusListener(s_busListener);
printf("BusListener Registered.\n");
}
/** Begin discovery on the well-known name of the service to be called, report the result to
stdout, and return the result status. */
QStatus FindAdvertisedName(void)
{
/* Begin discovery on the well-known name of the service to be called */
QStatus status = g_msgBus->FindAdvertisedName(SERVICE_NAME);
if (status == ER_OK) {
printf("org.alljoyn.Bus.FindAdvertisedName ('%s') succeeded.\n", SERVICE_NAME);
} else {
printf("org.alljoyn.Bus.FindAdvertisedName ('%s') failed (%s).\n", SERVICE_NAME, QCC_StatusText(status));
}
return status;
}
/** Wait for join session to complete, report the event to stdout, and return the result status. */
QStatus WaitForJoinSessionCompletion(void)
{
unsigned int count = 0;
while (!s_joinComplete && !s_interrupt) {
if (0 == (count++ % 10)) {
printf("Waited %u seconds for JoinSession completion.\n", count / 10);
}
#ifdef _WIN32
Sleep(100);
#else
usleep(100 * 1000);
#endif
}
return s_joinComplete && !s_interrupt ? ER_OK : ER_ALLJOYN_JOINSESSION_REPLY_CONNECT_FAILED;
}
/** Do a method call, report the result to stdout, and return the result status. */
QStatus MakeMethodCall(void)
{
ProxyBusObject remoteObj(*g_msgBus, SERVICE_NAME, SERVICE_PATH, s_sessionId);
const InterfaceDescription* alljoynTestIntf = g_msgBus->GetInterface(INTERFACE_NAME);
assert(alljoynTestIntf);
remoteObj.AddInterface(*alljoynTestIntf);
Message reply(*g_msgBus);
MsgArg inputs[2];
inputs[0].Set("s", "Hello ");
inputs[1].Set("s", "World!");
QStatus status = remoteObj.MethodCall(INTERFACE_NAME, "cat", inputs, 2, reply, 5000);
if (ER_OK == status) {
printf("'%s.%s' (path='%s') returned '%s'.\n", SERVICE_NAME, "cat",
SERVICE_PATH, reply->GetArg(0)->v_string.str);
} else {
printf("MethodCall on '%s.%s' failed.", SERVICE_NAME, "cat");
}
return status;
}
/** Main entry point */
int CDECL_CALL main(int argc, char** argv, char** envArg)
{
QCC_UNUSED(argc);
QCC_UNUSED(argv);
QCC_UNUSED(envArg);
if (AllJoynInit() != ER_OK) {
return 1;
}
#ifdef ROUTER
if (AllJoynRouterInit() != ER_OK) {
AllJoynShutdown();
return 1;
}
#endif
printf("AllJoyn Library version: %s.\n", ajn::GetVersion());
printf("AllJoyn Library build info: %s.\n", ajn::GetBuildInfo());
/* Install SIGINT handler. */
signal(SIGINT, SigIntHandler);
QStatus status = ER_OK;
/* Create message bus. */
g_msgBus = new BusAttachment("myApp", true);
/* This test for NULL is only required if new() behavior is to return NULL
* instead of throwing an exception upon an out of memory failure.
*/
if (!g_msgBus) {
status = ER_OUT_OF_MEMORY;
}
if (ER_OK == status) {
status = CreateInterface();
}
if (ER_OK == status) {
status = StartMessageBus();
}
if (ER_OK == status) {
status = ConnectToBus();
}
if (ER_OK == status) {
RegisterBusListener();
status = FindAdvertisedName();
}
if (ER_OK == status) {
status = WaitForJoinSessionCompletion();
}
if (ER_OK == status) {
status = MakeMethodCall();
}
/* Deallocate bus */
delete g_msgBus;
g_msgBus = NULL;
printf("Basic client exiting with status 0x%04x (%s).\n", status, QCC_StatusText(status));
#ifdef ROUTER
AllJoynRouterShutdown();
#endif
AllJoynShutdown();
return (int) status;
}
下面总结一下一般步骤:
step1:VS2015新建控制台工程之后,选择调试/属性,出现如下图:

注意:我的包名称是-Windows SDK(64bit)VS2012。
配置选择release,因为我用的是sdk下的release包,请对应选择。平台64位,我下载的包是64位,请对应选择。平台工具集是VS2012,不是默认的2015,因为我的包是2012。平台工具集没有VS2012的话,去下载VS2012安装完成就有了,或者直接使用VS2012。
添加附加包含目录:
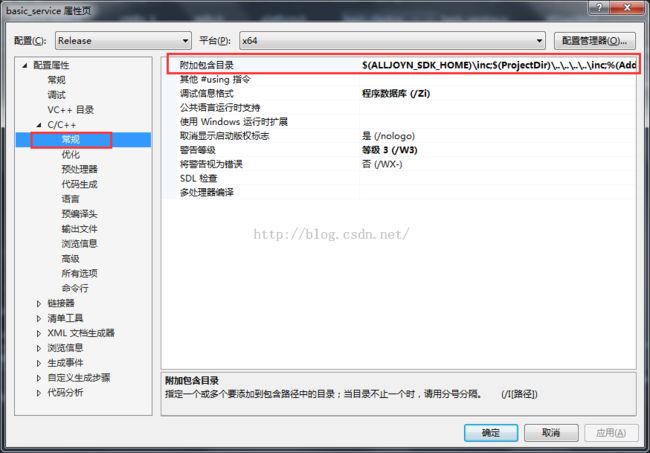
红色框框出来的部分,添加release包下的cpp下的inc文件夹,包含头文件。
附加库目录:
框出来部分,添加release下的cpp下的lib目录。
添加附加依赖项:
框出来的部分,添加ajrouter.lib和alljoyn.lib静态库。
到这里编写代码前的环境基本完成了。
step2:
测试代码编写,一个简单的client和server的测试代码如上所示,C++总线接口的实现:
/** Create the interface, report the result to stdout, and return the result status. */
QStatus CreateInterface(void)
{
/* Add org.alljoyn.Bus.method_sample interface */
InterfaceDescription* testIntf = NULL;
QStatus status = s_msgBus->CreateInterface(INTERFACE_NAME, testIntf);
if (status == ER_OK) {
printf("Interface created.\n");
testIntf->AddMethod("cat", "ss", "s", "inStr1,inStr2,outStr", 0);
testIntf->Activate();
} else {
printf("Failed to create interface '%s'.\n", INTERFACE_NAME);
}
return status;
} interface的声明,INTERFACE_NAME是全局变量,InterfaceDescription实现接口的描述,增加方法cat方法,传入两个str,传出一个str。
interface在server中的实现代码:
class BasicSampleObject : public BusObject {
public:
BasicSampleObject(BusAttachment& bus, const char* path) :
BusObject(path)
{
/** Add the test interface to this object */
const InterfaceDescription* exampleIntf = bus.GetInterface(INTERFACE_NAME);
assert(exampleIntf);
AddInterface(*exampleIntf);
/** Register the method handlers with the object */
const MethodEntry methodEntries[] = {
{ exampleIntf->GetMember("cat"), static_cast<MessageReceiver::MethodHandler>(&BasicSampleObject::Cat) }
};
QStatus status = AddMethodHandlers(methodEntries, sizeof(methodEntries) / sizeof(methodEntries[0]));
if (ER_OK != status) {
printf("Failed to register method handlers for BasicSampleObject.\n");
}
}
void ObjectRegistered()
{
BusObject::ObjectRegistered();
printf("ObjectRegistered has been called.\n");
}
void Cat(const InterfaceDescription::Member* member, Message& msg)
{
QCC_UNUSED(member);
/* Concatenate the two input strings and reply with the result. */
qcc::String inStr1 = msg->GetArg(0)->v_string.str;
qcc::String inStr2 = msg->GetArg(1)->v_string.str;
qcc::String outStr = inStr1 + inStr2;
MsgArg outArg("s", outStr.c_str());
QStatus status = MethodReply(msg, &outArg, 1);
if (ER_OK != status) {
printf("Ping: Error sending reply.\n");
}
}
}; BasicSampleObject类的构造函数中,指定了接口中的cat方法入口为,
BasicSampleObject类中的Cat方法,我们在Cat方法中去实现server具体的操作,测试的例子是两个字符串的加法。注意这里和Java中不同的是,函数的参数是放在Message类的对象中的,返回值的方法调用的是MethodReplay。
下面我们再看看client如何实现的方法调用:
/** Do a method call, report the result to stdout, and return the result status. */
QStatus MakeMethodCall(void)
{
ProxyBusObject remoteObj(*g_msgBus, SERVICE_NAME, SERVICE_PATH, s_sessionId);
const InterfaceDescription* alljoynTestIntf = g_msgBus->GetInterface(INTERFACE_NAME);
assert(alljoynTestIntf);
remoteObj.AddInterface(*alljoynTestIntf);
Message reply(*g_msgBus);
MsgArg inputs[2];
inputs[0].Set("s", "Hello ");
inputs[1].Set("s", "World!");
QStatus status = remoteObj.MethodCall(INTERFACE_NAME, "cat", inputs, 2, reply, 5000);
if (ER_OK == status) {
printf("'%s.%s' (path='%s') returned '%s'.\n", SERVICE_NAME, "cat",
SERVICE_PATH, reply->GetArg(0)->v_string.str);
} else {
printf("MethodCall on '%s.%s' failed.", SERVICE_NAME, "cat");
}
return status;
} 同java中相同的是创建代理对象,不同的是java中直接从代理对象获得接口之后,使用(void or String)interface.method()就实现了方法的调用和返回。这里用了接口描述,没法直接向java一样的调用方法,传入参数以MsgArg数组实现,传出参数以Message实现。
总结:可能会出现下面的情况,step1和step2做完成之后会出现大量的Link错误,尽量去尝试着修改。没有办法的办法是,导入源码工程去实现想要的功能,这样可移植比较低。方法调用的流程几乎和android端的是一致的,在总线interface的声明和实现上有差别。另外client和server要统一的4个地方,和android端也是一致的,如下:
static const char* INTERFACE_NAME = "org.alljoyn.Bus.sample"; static const char* SERVICE_NAME = "org.alljoyn.Bus.sample"; static const char* SERVICE_PATH = "/sample"; static const SessionPort SERVICE_PORT = 25;