AI中的几种搜索算法---SA搜索算法
AI中的几种搜索算法---SA搜索算法
引言
SA (Simulated Annealing)搜索算法,就如它的名字,是模仿了退火的处理过程。在提到TSP问题的时候,经常会使用该算法进行解决。
一、SA搜索算法的基本介绍
1.SA算法流程
该算法的流程如下
1. 首先便是初始化工作,设置初始温度(temperature),获得一个随机的解决方案,并将其设置为当前解决方案(cur_sol)。
2. 如果温度大于0,处理cur_sol(perturb处理,比如随机调换方案中步骤执行顺序等),得到新方案(new_sol);如果温度小于0,结束算法。
3. 比较当前方案和新方案的消耗(deltaE = cost(new_sol) – cost(cur_sol))。
4. 如果deltaE小于0则表明新方案比当前方案优秀,将新方案设置为当前方案,降温,则继续执行步骤2。
5. 根据公式p = exp(-detaE/T)。计算p将其与以小于1的正随机数比较。如果p大于随机数,正将新方案设置为当前方案,降温继续执行步骤2;如果p小于随机数,则降温直接执行步骤2。
这个流程可以简单的理解:不断获取新方案,和当前比较,如果优于当前方案,取新方案为当前方案;如果劣于当前方案,则给予它一个机会成为当前方案,这个机会的概率取决于当前的温度和它与当前方案之间的差距。
二、TSP问题
这里举TSP问题,这个在SA搜索中最常用的例子。
1. TSP问题介绍
TSP问题即旅行商问题:一个旅行商A被分配到一个任务,公司要求A去几个城市进行公司业务拓展,所以A就会拿出地图制定一个合理的路线。其中路线的要求便是消耗最小,并且能够从某一个城市出发,并且最后返回该城市时,已经访问过了所有城市。
2. TSP问题分析
首先我们需要联系一下SA算法,将几个TSP中的概念对应到SA中。路线便是我们要搜索的解决方案(solution),路线所经历的长度便是SA中的消耗,这样问题就简单了。
至于perturb处理,便是调换路线中两个城市的顺序比如
Cur_sol: A->B->C->D->E->A
经过perturb处理后得到new_sol
New_sol:A->B->D->C->E->A
我们可以随机调换两个城市的访问顺序。
接下来便是p = exp(-detaE/T)。联系TSP问题这个公式中

p和p2都为路线,p为当前路线,p2为新路线。p[i]表示路线中的第i个城市,L(x,y)表示城市x和城市y之间的距离。
3. TSP问题核心代码
- int tsp_sa(City * cities,intnCities,int ** path)
- {
- if(nCities< 2)
- return-1;
- doubletemperature = 100.0;
- *path = new int[nCities];
- int *newpath = new int[nCities];
- GetRandomPath(nCities,*path);
- longcurdistance = CaculateDistance(cities,nCities,*path);
- while(temperature> 1.0)
- {
- memcpy(newpath,*path,nCities*sizeof(int));
- PerturbPath(nCities,newpath);
- longnewdistance = CaculateDistance(cities,nCities,newpath);
- longdeltE = newdistance - curdistance;
- if(deltE< 0)
- {
- memcpy(*path,newpath,sizeof(int) *nCities);
- curdistance = newdistance;
- }
- else
- {
- doublep = exp(-1 * deltE / temperature) ;
- doublerandp = ((double)rand()/(double)RAND_MAX);
- if(p> randp)//给新方案一个机会成为当前方案
- {
- memcpy(*path,newpath,sizeof(int) *nCities);
- curdistance = newdistance;
- }
- }
- temperature -= 0.01;
- }
- delete[]newpath;
- return 1;
- }
说明其中City是一个自定义的结构体,保存了城市的位置。PerturbPath函数则是随机调换路线中两个城市的访问顺序。
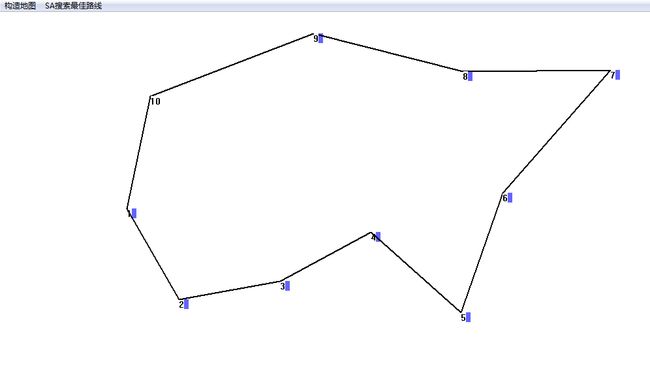
4. TSP程序截图
三、总结
SA算法,随着温度越来越低,获得的方案也是越来越稳定,因为温度的降低,是的采纳非优方案的概率越来越低。至于为什么还要给非优方案一个机会,是因为要避免局部最优(Local Optimum)。