基于BoF(Bag-of-feature)图像分类
图像分类一直是图像处理问题的热点,近年来基于BoF(bag-of-feature)特征袋方法倍受关注,特征袋方法(BoF)是词袋方法(BoW)一种改进。本文简要的介绍了基本BoF图像分类的思路和其目前的一些改进方法。
字典学习过程(train a codebook)
(1)特征提取:利用SIFT等局部描述子(SIFT方法最为常用,OpponentSIFT在各类SIFT改进方式综合表现最为优秀)提取图像的特征点,这个过程一般会生成非常多的特征点
(2)特征聚类:由于一般提取的特征点实在太多(每张训练图片上都会提取到成千上万的特征点),不太适合分析和操作,所以一般会利用K-Means聚类等方法将所以特征点分成K类,这里每个类,我们就称为一个词(codeword)
(3)形成字典:所有的类(词codeword)就构成字典(codebook)
图像投影(这个过程也叫Feature Pooling)
(1)特征提取:利用SIFT提取测试图像中所有的特征点
(2)查找对应词:就是找每个特征点对应的词
(3)构成图像特征词表:将字典内每个词出现频率构成图像特征向量(显然是K维向量)
分类:
现在每张图像我们都可以得到一个K维特征向量(反映了字典各词的出现频率),现在就是传统的分类问题了,最常用的方法是SVM:)
然而传统的BoF图像分类问题也存在问题:
(1)SIFT局部描述子能较好的描述图像纹理信息(描述方向梯度),但是也有可能造成其他方面信息的丢失,所以一般解决方法是利用多描述子混合的思路。
(2)这种一个特征点对应于一个词的方法显然忽略图像空间上下文(Spatial Context Modeling),这很容易造成词语义的模糊,所以我们需要构建空间结构,更好的Feature Pooling :)
最为成功的尝试就是SPM(Spatial Pyramid Matching 空间金字塔匹配),这个方法就是将图像分成多个尺度小块,这里图像每个尺度内的小分块都会得到一个特征词表,所以特征词表串联起来就得到整个图像特征词表,这样做好处是保留了图像空间信息,另外一种思路是在方向梯度空间内操作。
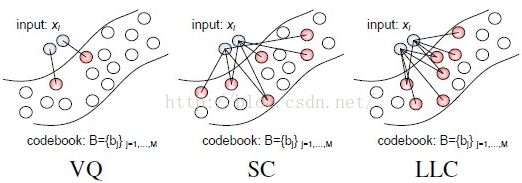
另一种方法是引入词组(phrases),在由词(low-level)到主题(high-level)中引入中间层(mid-level),比如LLC引入特征点的位置约束。
下面这种GPP的方法也很类似,其将特征点周围最近的K个特征点共同组成了一个词组(Phrase),此时整个Feature Pooling过程变为word-phrase-theme

在BoF图像分类问题上,这方面(Better coding + pooling)的研究是重点,上面关于SPM和LLC,我只是简要说了一些目的和原理,不过网上有很多关于SPM及稀疏编码的文章可以参考,特别是这篇http://blog.csdn.net/jwh_bupt/article/details/9837555,转载也挺多的。
(3)图像中一般都存在同主题无关的内容,会影响分类的结果,改进方法是检测兴趣区域(detection of regions-of-interest(ROI))并给不同的权重。