SAR成像学习(五)方位向成像及matlab代码解析
1 overview

overview of this blog
2 critical points
目标区域如下图:

正侧视情况

斜测视的情况
注意y轴的原点在合成孔径的中间,以下成像只研究这一个合成孔径的成像问题。请留意图中 Y 0 ,Y c ,X c 等的位置。另外一个需要注意的定义是aspect angle of the radar with respect of the target area θ n (μ) :
θ n (μ)=arctan(y n −μx n )
它可以用来表示平台相对于目标的位置变化,对应关系为:

正侧视情(上) 斜测视的情况(下)
2.1 system model
目标函数:
f 0 (y)=∑ n σ n δ(y−y n )
发射信号(简化):
p(t)=exp(jωt)
回波信号:
s(t,μ) =∑ n σ n p[t−2x 2 n +(y n −μ) 2 − − − − − − − − − − − − √ c ]=exp(jωt)∑ n σ n exp(−j2kx 2 n +(y n −μ) 2 − − − − − − − − − − − − √ )
其中
k=ω/c The point
μ=y n is called the closest point of approach (CPA) of the radar for the nth target. 另外上式中的相位函数
exp(−j2kx 2 n +(y n −μ) 2 − − − − − − − − − − − − √ ) 是一个相位调制函数, phase-modulated (PM) signal which we refer to as the *spherical PM signal* . Fast-time baseband conversion of the recorded signal:
s(ω,μ) =s(t,μ)exp(−jωt)=∑ n σ n exp(−j2kx 2 n +(y n −μ) 2 − − − − − − − − − − − − √ )=∑ n s n (ω,μ)
正侧视模式下,定义参考信号为
(x n ,y n )=(X c ,0) 对应的
单位发射体的基带回波信号:
s 0 (ω,μ)=exp(−j2kX 2 c +μ 2 − − − − − − − √ )
成像模型:
s(ω,μ)=f 0 (μ)∗s 0 (ω,μ)
其中
f 0 (μ)=∑ n σ n δ(μ−y n ) 表示目标函数。 这里补充一个小知识:函数
f(t) 与单位冲激函数
δ(t) 的卷积的结果仍然是函数本身,进一步与
δ(t−t 0 ) 卷积的结果相当于信号本身延迟
t 0 上式即为system model中的正问题,其对应的逆问题即是成像的关键问题:恢复出
f 0 (μ) 。模型如下图:
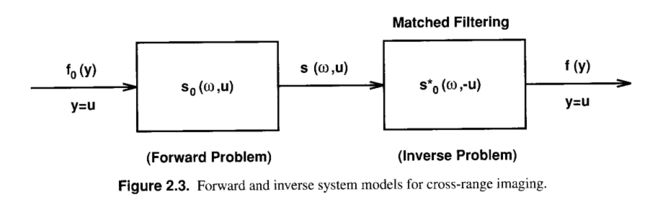
system model
2.2 characteristics of the recorded signal
instantaneous frequency for the nth target:
K μn (μ)=2ksinθ n (μ)
这很好地符合了我们的常识,随着平台相对于目标位置的变化,频率会发生变化,即“多普勒效应”。频率变化对应的图形如下:

正侧视情况(左) 斜视情况(右)
图中的虚线对应的而是合成孔径无限长的情况,实线对应的是实际情况。注意频率为零的位置(时刻),即之前说的CPA叫做相位中心。
对于上式进行傅里叶变换得到回波信号频率范围:
Ω n =[2ksinθ n (L),2ksinθ n (−L)]
the center of this band is approximately located at:
Ω nc =2ksinθ n (0)
带宽:
∣ Ω n ∣≈4kLx n cos 2 θ n (0)
注意对于不同位置的目标 θ n (0) 的值并不一样,所以这个式子意味着不同的目标带宽不同。
(后期更新部分) 对于相同距离的目标, θ n (0) 越小的目标的带宽越小,也即是,一个合成天线的中间点对应的那一行上的某个目标具有最大的带宽(无论是斜视模式还是正视模式)。注意这个结论的得出是因为目前只是考虑了考虑了一个合成孔径内部的成像问题。如果平台动起来,那么 对于相同距离的目标,他们的多普勒历程应该是一样的。
采样间隔:
采样间隔由带宽决定,严格地说是由最大带宽决定,进一步,是由目标和平台的相对位置决定,正侧视情况和斜侧视情况下分别有不同的采样间隔公式。
2.3 slow time compression
A quantity that is the slow-time intercal between successive radar transmissions (while the vehicle is moved by Δ μ ) is called pulse repetition interval (PRI):
PRI=Δ μ v R
其中 v R 表示平台速度。对应的有 pulse repetition frequency (PRF):
PRF=1PRI =v R Δ μ
可见随着 Δ μ 的减小,PRF增大。 但是,硬件上希望PRF越小越好,怎么办呢?答案是slow time compression。这个过程是先用一个较大的间隔对回波信号进行采样(亚采样),当然了这里采样不满足回波信号的采样要求,出现了混叠,但是我们让它满足压缩后的回波信号的采样要求,然后我们利用这个信号经“傅里变换-补零-傅里逆变换-解压缩”得到满足采样要求的回波信号。正侧视情况下某目标的原始信号频谱、参考信号频谱及压缩信号频谱如下图,可见,压缩相当于去除掉了某些频率成分,从而使得带宽变小(对采样频率的要求变低)。

正侧视情况下某目标的原始信号频谱、参考信号频谱及压缩信号频
(后期更新部分)实际上PRF的选择需要综合考虑带宽、采样率、星下点回波等等因素。
2.4 point spread function
对 基带转换后的回波信号进行匹配滤波重建:
f(y)=∑ n σ n i n (ω,y−y n )
其中
i n (ω,y−y n )=∣ Ω n ∣exp(jΩ nc y)sinc(12π ∣ Ω n ∣y)
转化后有:
∣ f(y)∣=∑ n σ n ∣ psf n ∣(ω,y−y n )
其中 psf n =i n 表示点扩散函数。 注意点扩散函数的特点(sharpness)跟信号的带宽有关,还记得吗?信号的带宽跟目标的位置相关。(但这个似乎并不意味着不同目标的分辨能力不同,因为不同目标相对于平台的位置是一个动态值。此外,原则上距离较远的目标合成孔径时间相对较长。)
2.5 zero-padding in Synthetic Aperture Domain
为什么要进行zero-padding in Synthetic Aperture Domain?一方面匹配滤波的结果的频域分辨率与回波信号的频域分辨率一致:
Δ k y =Δ k μ =πL
另一方面呢,目标的区域是 2Y 0 ,这意味着目标对应的频域分辨力必须是:
Δ k y <=πY 0
如果 Y 0 >L ,即目标区域大于合成孔径长度,则出现矛盾,这时候应该对回波信号在距离域(时间域)补零。一般情况下可以通过下式实现:
L min =max(L,Y 0 )
3 matlab code
主要参考书及代码下载
我对博客对应的代码进行了详细注释 感兴趣的 请下载