(LOG)Laplacian of Guassian & (DOH)Determinant of Hessian 斑点检测
1. 原理
考虑一个一维信号,该信号在t=1000时发生了阶跃,那么如何检测这个阶跃的位置呢?
图1分别用1阶高斯导数和2阶高斯导数对该信号进行卷积
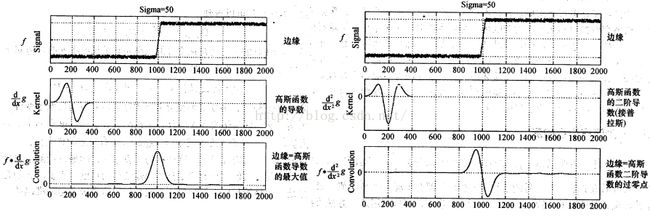
图1-1. 一阶高斯导数(左)、二阶高斯导数(右)与原始信号卷积
可以看到,一阶高斯导的卷积结果在t=1000产生了一个极值,二阶高斯导的卷积在该位置是个过零点
LOG就是利用二阶高斯导数(也叫拉普拉斯变换)与原始信号(图像)卷积,通过检测局部极值获得角点。
需要注意的是:不同方差的二阶高斯导数得到的响应是不同的,当方差与信号波动的半径匹配时获得最大响应(图1-2)
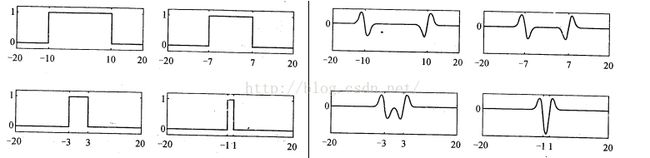
图1-2. 方差为1的二阶高斯导数与不同半径的信号(左)卷积结果(右)
但此时我们还不能愉快的利用这个性质,因为未经处理的二阶高斯导数随方差增大会发生衰减,所以可能会出现这种情况(图1-3)
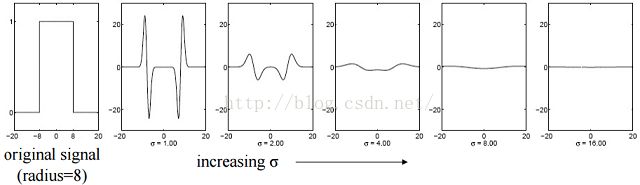
图1-3. 二阶高斯导数随方差增大的衰减现象
处理的方法叫规范化,很简单,就是在导数前乘上方差的平方。
公式推导:
(1)LOG
二阶高斯函数![]() ,规范化二阶高斯函数导数
,规范化二阶高斯函数导数![]() ,
,
整理得![]() ,将导数对方差求导,取0值对应的极值
,将导数对方差求导,取0值对应的极值![]() ,
,
这个就是信号半径与方差的关系。
(2)DOH
基本思路与LOG一样,只不过使用了Hessian矩阵: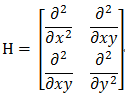 ,对一张图计算xx,yy,xy三个方向的卷积,然后计算其加权行列式:
,对一张图计算xx,yy,xy三个方向的卷积,然后计算其加权行列式:![]() 。理论上,与LOG相比,DOH对细长结构的斑点有较好的抑制作用。
。理论上,与LOG相比,DOH对细长结构的斑点有较好的抑制作用。
LOG斑点检测算法步骤:
(1)预定义一组方差值(因为不知道待检信号的尺度),对每个方差生成一个二阶高斯模板
注:这里取![]() (DOH为
(DOH为![]() ,生成3个模板),有个放大差异的作用;模板尺寸取
,生成3个模板),有个放大差异的作用;模板尺寸取 ![]()
(2)对每个方差,将对应的高斯模板与原始信号做卷积(DOH需要将三个模板分别与原始图做卷积,然后计算其加权行列式),得到一组不同尺度的图像集
(3)对每个空间位置,比较其在图像集里26(3*3*3-1)个位置(图1-4)的值,如果为极值,则认为在该点有一个斑点
通过此时的尺度值可进一步得到该斑点的半径。
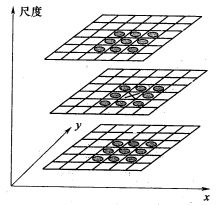
图1-4. 在26个位置里比较
2. 代码
#define MAXPOINTS 50000
typedef struct myPoint
{
int x;
int y;
int radiu;
}_point;
void getLOGkernel(int halfWin, float sita, float** kernel);
void cornerLOG(unsigned char* srcImg, _point* corner, int* count, int height, int width, float minScale, float maxScale, int stepScale);
void converlution(unsigned char* srcImg, int** dstImg, int height, int width, float* kernel, int kernelWin);
bool isMax(int* compImg, int compValue, _point compPoint, int kerWin, int imgWidth, bool isSameK);
void cornerDOH(unsigned char* srcImg, _point* corner, int* count, int height, int width, float minScale, float maxScale, int stepScale);
void getDOHkernel(int halfWin, float sita, float** kernelxx, float** kernelyy, float** kernelxy);
void detValue(int** scaleimg, int* imgxx, int* imgyy, int* imgxy, float scale, int height, int width);
void main()
{
_point corner[MAXPOINTS];
int numCorner = 0;
float minScale = 1;
float maxScale = 20;
float stepScale = 2;
unsigned char* srcImg = NULL;
cv::Mat img = cv::imread("../file/sunflowers.jpg", 0);
int height = img.rows;
int width = img.cols;
srcImg = new unsigned char[height*width];
for(int i=0; i<height; i++)
{
uchar* ptr = img.ptr<uchar>(i);
for(int j=0; j<width; j++)
srcImg[i*width+j] = ptr[j];
}
#if 1
cornerLOG(srcImg, corner, &numCorner, height, width, minScale, maxScale, stepScale);
#else
cornerDOH(srcImg, corner, &numCorner, height, width, minScale, maxScale, stepScale);
#endif
delete[] srcImg;
cv::Mat showImg;
cvtColor(img, showImg, CV_GRAY2BGR);
for(int i=0; i<numCorner; i++)
{
cv::Point cor(corner[i].x, corner[i].y);
cv::circle(showImg, cor, corner[i].radiu, cv::Scalar(0,0,255));
}
cv::namedWindow("show");
cv::imshow("show", showImg);
cv::waitKey(0);
}
void getLOGkernel(int halfWin, float sita, float** kernel)
{
int winSize = 2*halfWin+1;
float tmp1, tmp2, sumValue = 0;
float powsita = sita*sita;
for(int i=-halfWin; i<=halfWin; i++)
{
for(int j=-halfWin; j<=halfWin; j++)
{
tmp1 = -1*(i*i+j*j)/(2*powsita);
tmp2 = exp(tmp1)*(i*i+j*j-2*powsita);//exp(tmp1)*(1+tmp1)/(-1*powsita*powsita);
sumValue += tmp2;
(*kernel)[(i+halfWin)*winSize+(j+halfWin)] = tmp2;
}
}
for(int i=0; i<winSize*winSize; i++)
(*kernel)[i] -= sumValue/(winSize*winSize);
}
void converlution(unsigned char* srcImg, int** dstImg, int height, int width, float* kernel, int kernelWin)
{
for(int i=0; i<height; i++)
{
for(int j=0; j<width; j++)
{
float sumValue = 0;
int count = 0;
for(int m=i-kernelWin; m<=i+kernelWin; m++)
{
for(int n=j-kernelWin; n<=j+kernelWin; n++)
{
if(m>=0 && m<height && n>=0 && n<width)
sumValue += int(srcImg[m*width+n])*kernel[count];
count++;
}
}
sumValue *= 100;
(*dstImg)[i*width+j] = int(sumValue);
}
}
}
bool isMax(int* compImg, int compValue, _point compPoint, int kerWin, int imgWidth, bool isSameK)
{
for(int i=compPoint.y-kerWin; i<=compPoint.y+kerWin; i++)
{
for(int j=compPoint.x-kerWin; j<=compPoint.x+kerWin; j++)
{
if(isSameK && i==compPoint.y && j==compPoint.x)
continue;
if(abs(compValue) <= abs(compImg[i*imgWidth+j]))
return false;
}
}
return true;
}
void cornerLOG(unsigned char* srcImg, _point* corner, int* count, int height, int width, float minScale, float maxScale, int stepScale)
{
int numScale = int((maxScale - minScale)/stepScale);
int** scaledImg = new int*[numScale];
for(int i=0; i<numScale; i++)
scaledImg[i] = new int[height*width];
for(int k=0; k<numScale; k++)
{
float scale = minScale+stepScale*k;
int kernelWin = 3*scale;
float *kernel = new float[(2*kernelWin+1)*(2*kernelWin+1)];
getLOGkernel(kernelWin, scale, &kernel);
converlution(srcImg, &(scaledImg[k]), height, width, kernel, kernelWin);
delete[] kernel;
}
*count = 0;
for(int i=1; i<height-1; i++)
{
for(int j=1; j<width-1; j++)
{
for(int k=1; k<numScale-1; k++)
{
if((*count)>=MAXPOINTS)
{
for(int m=0; m<numScale; m++)
delete[] scaledImg[m];
delete[] scaledImg;
return;
}
_point cp;
cp.x = j;
cp.y = i;
float scale = minScale+k*stepScale;
cp.radiu = int(1.414*scale+0.5);
if(isMax(scaledImg[k-1], scaledImg[k][i*width+j], cp, 1, width, false) &&
isMax(scaledImg[k], scaledImg[k][i*width+j], cp, 1, width, true) &&
isMax(scaledImg[k+1], scaledImg[k][i*width+j], cp, 1, width, false))
{
corner[(*count)++] = cp;
break;
}
}
}
}
for(int i=0; i<numScale; i++)
delete[] scaledImg[i];
delete[] scaledImg;
}
void getDOHkernel(int halfWin, float sita, float** kernelxx, float** kernelyy, float** kernelxy)
{
int winSize = 2*halfWin+1;
float tmp1, tmpxx, tmpyy, tmpxy;
float sumValuexx = 0, sumValueyy = 0, sumValuexy = 0;
float powsita = sita*sita;
for(int i=-halfWin; i<=halfWin; i++)
{
for(int j=-halfWin; j<=halfWin; j++)
{
tmp1 = -1*(i*i+j*j)/(2*powsita);
tmpxx = exp(tmp1)*(j*j-powsita);
tmpyy = exp(tmp1)*(i*i-powsita);
tmpxy = exp(tmp1)*i*j;
sumValuexx += tmpxx;
sumValueyy += tmpyy;
sumValuexy += tmpxy;
(*kernelxx)[(i+halfWin)*winSize+(j+halfWin)] = tmpxx;
(*kernelyy)[(i+halfWin)*winSize+(j+halfWin)] = tmpyy;
(*kernelxy)[(i+halfWin)*winSize+(j+halfWin)] = tmpxy;
}
}
for(int i=0; i<winSize*winSize; i++)
{
(*kernelxx)[i] -= sumValuexx/(winSize*winSize);
(*kernelyy)[i] -= sumValueyy/(winSize*winSize);
(*kernelxy)[i] -= sumValuexy/(winSize*winSize);
}
}
void detValue(int** imgscale, int* imgxx, int* imgyy, int* imgxy, float scale, int height, int width)
{
for(int i=0; i<height; i++)
{
for(int j=0; j<width; j++)
{
float xx = imgxx[i*width+j]/100.0;
float yy = imgyy[i*width+j]/100.0;
float xy = imgxy[i*width+j]/100.0;
int vv = xx*yy-xy*xy;
(*imgscale)[i*width+j] = int(vv/(scale*scale));
}
}
}
void cornerDOH(unsigned char* srcImg, _point* corner, int* count, int height, int width, float minScale, float maxScale, int stepScale)
{
int numScale = int((maxScale - minScale)/stepScale);
int** scaledImg = new int*[numScale];
for(int i=0; i<numScale; i++)
scaledImg[i] = new int[height*width];
for(int k=0; k<numScale; k++)
{
float scale = minScale+stepScale*k;
int kernelWin = 3*scale;
float *kernelxx = new float[(2*kernelWin+1)*(2*kernelWin+1)];
float *kernelyy = new float[(2*kernelWin+1)*(2*kernelWin+1)];
float *kernelxy = new float[(2*kernelWin+1)*(2*kernelWin+1)];
getDOHkernel(kernelWin, scale, &kernelxx, &kernelyy, &kernelxy);
int** tmpImg = new int*[3];
for(int i=0; i<3; i++)
tmpImg[i] = new int[height*width];
converlution(srcImg, &(tmpImg[0]), height, width, kernelxx, kernelWin);
converlution(srcImg, &(tmpImg[1]), height, width, kernelyy, kernelWin);
converlution(srcImg, &(tmpImg[2]), height, width, kernelxy, kernelWin);
detValue(&(scaledImg[k]), tmpImg[0], tmpImg[1], tmpImg[2], scale, height, width);
for(int i=0; i<3; i++)
delete[] tmpImg[i];
delete[] tmpImg;
delete[] kernelxx;
delete[] kernelyy;
delete[] kernelxy;
}
*count = 0;
for(int i=1; i<height-1; i++)
{
for(int j=1; j<width-1; j++)
{
for(int k=1; k<numScale-1; k++)
{
if((*count)>=MAXPOINTS)
{
for(int m=0; m<numScale; m++)
delete[] scaledImg[m];
delete[] scaledImg;
return;
}
_point cp;
cp.x = j;
cp.y = i;
float scale = minScale+k*stepScale;
cp.radiu = int(1.414*scale+0.5);
if(isMax(scaledImg[k-1], scaledImg[k][i*width+j], cp, 1, width, false) &&
isMax(scaledImg[k], scaledImg[k][i*width+j], cp, 1, width, true) &&
isMax(scaledImg[k+1], scaledImg[k][i*width+j], cp, 1, width,false))
{
corner[(*count)++] = cp;
break;
}
}
}
}
for(int i=0; i<numScale; i++)
delete[] scaledImg[i];
delete[] scaledImg;
}
效果图(左LOG,右DOH)

