Samung LCD接口原理
内核:linux2.6/linux3.0
系统:android/android4.0
平台:samsung exynos 4210、exynos 4412 、exynos 5250
参考:S5PV210显示驱动分析与移植(android)
这篇文章中转载的成分比较多,不过大部分内容是从芯片手册上翻译过来。Framebuffer部分是黄冈老师--《嵌入式Linux之我行》这一系列博客中的,嵌入式Linux之我行这系列博客写的非常精,我刚学习Linux时经常拜读他的博客。这部分内容比较固定,三星的芯片跟新了好多代,不过这部分变化不大,技术是一个积累的过程,感谢那些前辈给我们整理比较好的学习资料,有比较好的技术继承。
这篇从LCD控制器、接口信号硬件接口 寄存器、Framebuffer 、接口函数的实现及寄存器的操作来讲解,同事补充两个知点:如何阅读LCD、PWM概述;
一、 LCD控制器
功能模块的实现其实是芯片里面集成了一个相应的控制器,比如IIC有IIC控制器,UART有UART控制器等,像其他功能模块一样LCD也有一个控制器,来实现图形信息的处理。LCD控制器可以通过编程支持不同LCD屏的要求,例如行和列像素数,数据总线宽度,接口时序和刷新频率等。LCD控制器的主要作用,是将定位在系统存储器中的显示缓冲区中的LCD图像数据传送到外部LCD驱动器,并产生必要的控制信号,例如RGB_VSYNC,RGB_HSYNC, RGB_VCLK等。
如下图所示,在Exynos4412规格书中截图,LCD控制器的构成。

(下面这部分来自网络翻译,规格书中的描述)
主要由VSFR,VDMA, VPRCS , VTIME和视频时钟产生器几个模块组成:
(1)、VSFR由121个可编程控制器组,一套gamma LUT寄存器组(包括64个寄存器),一套i80命令寄存器组(包括12个寄存器)和5块256*32调色板存储器组成,主要用于对lcd控制器进行配置。
(2)、VDMA是LCD专用的DMA传输通道,可以自动从系统总线上获取视频数据传送到VPRCS,无需CPU干涉。
(3)、VPRCS收到数据后组成特定的格式(如16bpp或24bpp),然后通过数据接口(RGB_VD, VEN_VD, V656_VD or SYS_VD)传送到外部LCD屏上。
(4)、VTIME模块由可编程逻辑组成,负责不同lcd驱动器的接口时序控制需求。VTIME模块产生 RGB_VSYNC, RGB_HSYNC, RGB_VCLK, RGB_VDEN,VEN_VSYNC等信号。
主要特性:
(1)、支持4种接口类型:RGB/i80/ITU 601(656)/YTU444
(2)、支持单色、4级灰度、16级灰度、256色的调色板显示模式
(3)、支持64K和16M色非调色板显示模式
(4)、支持多种规格和分辨率的LCD
(5)、虚拟屏幕最大可达16MB
(6)、5个256*32位调色板内存
(7)、支持透明叠加
二、接口信号
FIMD显示控制器全部信号定义如下所示
| Signal |
I/O |
Description |
LCD Type |
| LCD_HSYNC |
O |
水平同步信号 |
RGB I/F |
| LCD_VSYNC |
O |
垂直同步信号 |
|
| LCD_VDEN |
O |
数据使能 |
|
| LCD_VCLK |
O |
视频时钟 |
|
| LCD_VD[23:0] |
O |
LCD像素数据输出 |
|
| SYS_OE |
O |
输出使能 |
|
| VSYNC_LDI |
O |
Indirect i80接口,垂直同步信号 |
i80 I/F |
| SYS_CS0 |
O |
Indirect i80接口,片选LCD0 |
|
| SYS_CS1 |
O |
Indirect i80接口,片选LCD1 |
|
| SYS_RS |
O |
Indirect i80接口,寄存器选择信号 |
|
| SYS_WE |
O |
Indirect i80接口,写使能信号 |
|
| SYS_VD[23:0] |
IO |
Indirect i80接口,视频数据输入输出 |
|
| SYS_OE |
O |
Indirect i80接口,输出使能信号 |
|
| VEN_HSYNC |
O |
601接口水平同步信号 |
ITU 601/656 I/F |
| VEN_VSYNC |
O |
601接口垂直同步信号 |
|
| VEN_HREF |
O |
601接口数据使能 |
|
| V601_CLK |
O |
601接口数据时钟 |
|
| VEN_DATA[7:0] |
O |
601接口YUV422格式数据输出 |
|
| V656_DATA[7:0] |
O |
656接口YUV422格式数据输出 |
|
| V656_CLK |
O |
656接口数据时钟 |
|
| VEN_FIELD |
O |
601接口域信号 |
1、其中主要的RGB接口信号:
(1)、LCD_HSYNC:行同步信号,表示一行数据的开始,LCD控制器在整个水平线(整行)数据移入LCD驱动器后,插入一个LCD_HSYNC信号;
(2)、LCD_VSYNC: 帧同步信号,表示一帧数据的开始,LCD控制器在一个完整帧显示完成后立即插入一个LCD_VSYNC信号,开始新一帧的显示;VSYNC信号出现的频率表示一秒钟内能显示多少帧图像,称为“显示器的频率”
(3)、LCD_VCLK:像素时钟信号,表示正在传输一个像素的数据;
(4)、LCD_VDEN:数据使能信号;
(5)、 LCD_VD[23:0]: LCD像素数据输出端口
2、RGB信号的时序
下图是LCDRGB接口工作时序图:
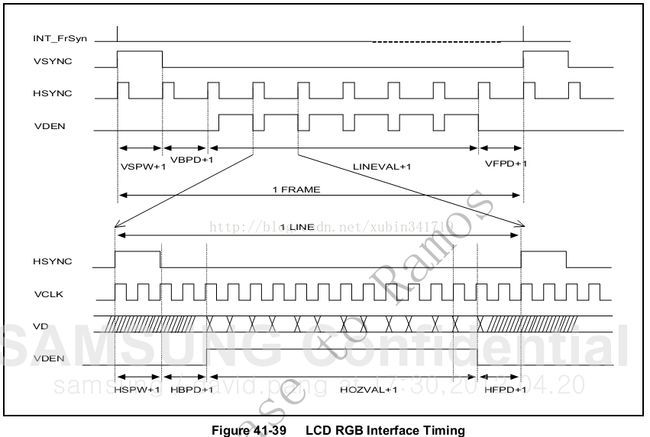
(1)、上面时序图上各时钟延时参数的含义如下:这些配置可以在LCD规格书中查取
VBPD(vertical back porch):表示在一帧图像开始时,垂直同步信号以后的无效的行数
VFBD(vertical front porch):表示在一帧图像结束后,垂直同步信号以前的无效的行数VSPW(vertical sync pulse width):表示垂直同步脉冲的宽度,用行数计算
HBPD(horizontal back porch):表示从水平同步信号开始到一行的有效数据开始之间的VCLK的个数HFPD(horizontal front porth):表示一行的有效数据结束到下一个水平同步信号开始之间的VCLK的个数
HSPW(horizontal sync pulse width):表示水平同步信号的宽度,用VCLK计算
(2)、帧的传输过程
VSYNC信号有效时,表示一帧数据的开始, 信号宽度为(VSPW +1)个HSYNC信号周期,即(VSPW +1)个无效行;
VSYNC信号脉冲之后,总共还要经过(VBPD+ 1)个HSYNC信号周期,有效的行数据才出现; 所以,在VSYNC信号有效之后,还要经过(VSPW +1 + VBPD + 1)个无效的行;
随即发出(LINEVAL + 1)行的有效数据;
最后是(VFPD + 1)个无效的行;
(3)、行中像素数据的传输过程
HSYNC信号有效时,表示一行数据的开始,信号宽度为(HSPW+ 1)个VCLK信号周期,即(HSPW +1)个无效像素;
HSYNC信号脉冲之后,还要经过(HBPD +1)个VCLK信号周期,有效的像素数据才出现;
随后发出(HOZVAL+ 1)个像素的有效数据;
最后是(HFPD +1)个无效的像素;
(4)、将VSYNC、HSYNC、VCLK等信号的时间参数设置好之后,并将帧内存的地址告诉LCD控制器,它即可自动地发起DMA传输从帧内存中得到图像数据,最终在上述信号的控制下出现在数据总线VD[23:0]上。用户只需要把要显示的图像数据写入帧内存中。
其实现实的图像有像素点主城行、行组成场、场组成动画、动画叠加也就是3D的出现,也就是我们所说的“点动成线、线动成面、面动成体”。
三、LCD的硬件接口

1、16M(24BPP)色的显示模式
用24位的数据来表示一个像素的颜色,每种颜色使用8位。 LCD控制器从内存中获得某个像素的24为颜色值后,直接通过VD[23:0]数据线发送给LCD;在内存中,使用4个字节(32位)来表示一个像素,其中的3个字节从高到低分别表示红、绿、蓝,剩余的1个字节无效;
2、64K(16BPP)色的显示模式
用16位的数据来表示一个像素的颜色;格式又分为两种: 5:6:5 ——使用5位来表示红色,6位表示绿色,5位表示蓝色 ; 5:5:5:1——分别使用5位来表示红、绿、蓝,最后一位表示透明度;
3、16BPP
4、serialRGB
不同的BPP接线方式如下所示:

四、寄存器
主要寄存器如下:
VIDCON0:配置视频输出格式,显示使能
VIDCON1:RGB 接口控制信号
VIDCON2: 输出数据格式控制
VIDCON3: 图像增强控制
I80IFCONx:i80接口控制信号
ITUIFCON: ITU接口控制信号
VIDTCONx:配置视频输出时序及显示大小
WINCONx:每个窗口特性设置
VIDOSDxA,B: 窗口位置设置
VIDOSDxC,D:OSD大小设置
五、Framebuffer驱动部分
这部分是:分析的比较好,我刚学linux的时候就拿个mini2440的板子对着他的博客练习)。其实这部分也是博主从S3c2440上分析的,三星芯片更新了这么多代,这块的原理还是不变的。就像一些协议一样,这么多年基本上不会变化,唯一出现的结果就是出来新的接口替代。LCD这块就是:TTL、LVDS、EDP、MIPI、HDMI等等…………速度更快,接线、PCB走线更简单,这就是集成化的好处。
1、简介
帧缓冲是Linux为显示设备提供的一个接口,它把一些显示设备描述成一个缓冲区,允许应用程序通过FrameBuffer定义好的接口访问这些图形设备,从而不用去关心具体的硬件细节。对于帧缓冲设备而言,只要在显示缓冲区与显示点对应的区域写入颜色值,对应的颜色就会自动的在屏幕上显示。下面来看一下在不同色位模式下缓冲区与显示点的对应关系:

2、驱动结构
帧缓冲设备为标准的字符型设备,在Linux中主设备号29,定义在/linux/major.h中的FB_MAJOR,次设备号定义帧缓冲的个数,最大允许有32个FrameBuffer,定义在/include/linux/fb.h中的FB_MAX,对应于文件系统下/dev/fb%d设备文件。
帧缓冲设备驱动在Linux子系统中的结构如下:
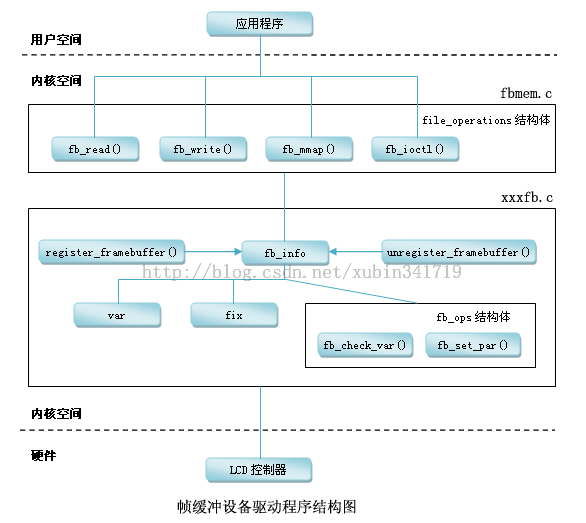
我们从上面这幅图看,帧缓冲设备在Linux中也可以看做是一个完整的子系统,大体由fbmem.c和xxxfb.c(对应我们的s3cfb.c)组成。向上给应用程序提供完善的设备文件操作接口(即对FrameBuffer设备进行read、write、ioctl等操作),接口在Linux提供的fbmem.c文件中实现;向下提供了硬件操作的接口,只是这些接口Linux并没有提供实现,因为这要根据具体的LCD控制器硬件进行设置,所以这就是我们要做的事情了(即s3cfb.c部分的实现)。
3、数据结构及接口函数
从帧缓冲设备驱动程序结构看,该驱动主要跟fb_info结构体有关,该结构体记录了帧缓冲设备的全部信息,包括设备的设置参数、状态以及对底层硬件操作的函数指针。在Linux中,每一个帧缓冲设备都必须对应一个fb_info,fb_info在/linux/fb.h中的定义如下:(只列出重要的一些)
- struct fb_info {
- int node;
- int flags;
- struct fb_var_screeninfo var;/*LCD可变参数结构体*/
- struct fb_fix_screeninfo fix;/*LCD固定参数结构体*/
- struct fb_monspecs monspecs; /*LCD显示器标准*/
- struct work_struct queue; /*帧缓冲事件队列*/
- struct fb_pixmap pixmap; /*图像硬件mapper*/
- struct fb_pixmap sprite; /*光标硬件mapper*/
- struct fb_cmap cmap; /*当前的颜色表*/
- struct fb_videomode *mode; /*当前的显示模式*/
- #ifdef CONFIG_FB_BACKLIGHT
- struct backlight_device *bl_dev;/*对应的背光设备*/
- struct mutex bl_curve_mutex;
- u8 bl_curve[FB_BACKLIGHT_LEVELS];/*背光调整*/
- #endif
- #ifdef CONFIG_FB_DEFERRED_IO
- struct delayed_work deferred_work;
- struct fb_deferred_io *fbdefio;
- #endif
- struct fb_ops *fbops; /*对底层硬件操作的函数指针*/
- struct device *device;
- struct device *dev; /*fb设备*/
- int class_flag;
- #ifdef CONFIG_FB_TILEBLITTING
- struct fb_tile_ops *tileops; /*图块Blitting*/
- #endif
- char __iomem *screen_base; /*虚拟基地址*/
- unsigned long screen_size; /*LCD IO映射的虚拟内存大小*/
- void *pseudo_palette; /*伪16色颜色表*/
- #define FBINFO_STATE_RUNNING 0
- #define FBINFO_STATE_SUSPENDED 1
- u32 state; /*LCD的挂起或恢复状态*/
- void *fbcon_par;
- void *par;
- };
其中,比较重要的成员有struct fb_var_screeninfo var、structfb_fix_screeninfo fix和struct fb_ops *fbops,他们也都是结构体。
fb_var_screeninfo结构体主要记录用户可以修改的控制器的参数,比如屏幕的分辨率和每个像素的比特数等,该结构体定义如下:
- struct fb_var_screeninfo {
- __u32 xres; /*可见屏幕一行有多少个像素点*/
- __u32 yres; /*可见屏幕一列有多少个像素点*/
- __u32 xres_virtual; /*虚拟屏幕一行有多少个像素点*/
- __u32 yres_virtual; /*虚拟屏幕一列有多少个像素点*/
- __u32 xoffset; /*虚拟到可见屏幕之间的行偏移*/
- __u32 yoffset; /*虚拟到可见屏幕之间的列偏移*/
- __u32 bits_per_pixel; /*每个像素的位数即BPP*/
- __u32 grayscale; /*非0时,指的是灰度*/
- struct fb_bitfield red; /*fb缓存的R位域*/
- struct fb_bitfield green; /*fb缓存的G位域*/
- struct fb_bitfield blue; /*fb缓存的B位域*/
- struct fb_bitfield transp; /*透明度*/
- __u32 nonstd; /* != 0 非标准像素格式*/
- __u32 activate;
- __u32 height; /*高度*/
- __u32 width; /*宽度*/
- __u32 accel_flags;
- /*定时:除了pixclock本身外,其他的都以像素时钟为单位*/
- __u32 pixclock; /*像素时钟(皮秒)*/
- __u32 left_margin; /*行切换,从同步到绘图之间的延迟*/
- __u32 right_margin; /*行切换,从绘图到同步之间的延迟*/
- __u32 upper_margin; /*帧切换,从同步到绘图之间的延迟*/
- __u32 lower_margin; /*帧切换,从绘图到同步之间的延迟*/
- __u32 hsync_len; /*水平同步的长度*/
- __u32 vsync_len; /*垂直同步的长度*/
- __u32 sync;
- __u32 vmode;
- __u32 rotate;
- __u32 reserved[5]; /*保留*/
- };
而fb_fix_screeninfo结构体又主要记录用户不可以修改的控制器的参数,比如屏幕缓冲区的物理地址和长度等,该结构体的定义如下:
- struct fb_fix_screeninfo {
- char id[16]; /*字符串形式的标示符 */
- unsigned long smem_start; /*fb缓存的开始位置 */
- __u32 smem_len; /*fb缓存的长度 */
- __u32 type; /*看FB_TYPE_* */
- __u32 type_aux; /*分界*/
- __u32 visual; /*看FB_VISUAL_* */
- __u16 xpanstep; /*如果没有硬件panning就赋值为0 */
- __u16 ypanstep; /*如果没有硬件panning就赋值为0 */
- __u16 ywrapstep; /*如果没有硬件ywrap就赋值为0 */
- __u32 line_length; /*一行的字节数 */
- unsigned long mmio_start; /*内存映射IO的开始位置*/
- __u32 mmio_len; /*内存映射IO的长度*/
- __u32 accel;
- __u16 reserved[3]; /*保留*/
- };
fb_ops结构体是对底层硬件操作的函数指针,该结构体中定义了对硬件的操作有:(这里只列出了常用的操作)
- struct fb_ops {
- struct module *owner;
- //检查可变参数并进行设置
- int (*fb_check_var)(struct fb_var_screeninfo *var, struct fb_info *info);
- //根据设置的值进行更新,使之有效
- int (*fb_set_par)(struct fb_info *info);
- //设置颜色寄存器
- int (*fb_setcolreg)(unsigned regno, unsigned red, unsigned green,
- unsigned blue, unsigned transp, struct fb_info *info);
- //显示空白
- int (*fb_blank)(int blank, struct fb_info *info);
- //矩形填充
- void (*fb_fillrect) (struct fb_info *info, const struct fb_fillrect *rect);
- //复制数据
- void (*fb_copyarea) (struct fb_info *info, const struct fb_copyarea *region);
- //图形填充
- void (*fb_imageblit) (struct fb_info *info, const struct fb_image *image);
- };
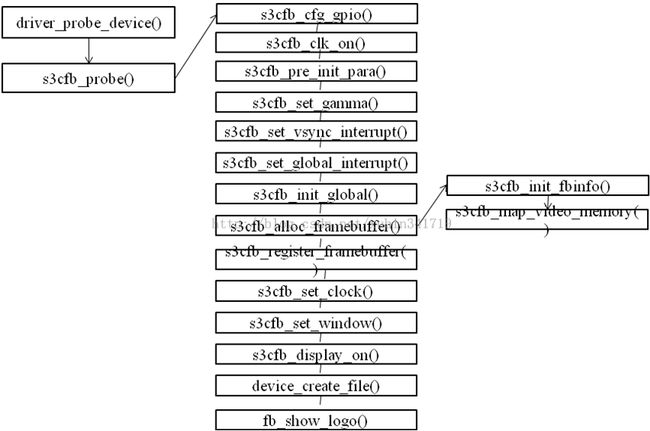
六、Framebuffer设备注册
S3cfb.c中的s3cfb_probe设备探测,是驱动注册的主要函数,
/*定义一个结构体用来维护驱动程序中各函数中用到的变量
先别看结构体要定义这些成员,到各函数使用的地方就明白了*/
- static int __devinit s3cfb_probe(struct platform_device *pdev)
- {
- struct s3c_platform_fb *pdata;/*LCD屏配置信息结构体*/
- struct s3cfb_global *fbdev;/*驱动程序全局变量结构体*/
- struct resource *res; /*用来保存从LCD平台设备中获取的LCD资源*/
- int i, j, ret = 0;
- printk("%s\n",__func__);
- fbdev = kzalloc(sizeof(struct s3cfb_global), GFP_KERNEL);
- if (!fbdev) {
- dev_err(&pdev->dev, "failed to allocate for "
- "global fb structure\n");
- ret = -ENOMEM;
- goto err_global;
- }
- fbdev->dev = &pdev->dev;
- fbdev->regulator = regulator_get(&pdev->dev, "pd");
- if (!fbdev->regulator) {
- dev_err(fbdev->dev, "failed to get regulator\n");
- ret = -EINVAL;
- goto err_regulator;
- }
- ret = regulator_enable(fbdev->regulator);
- if (ret < 0) {
- dev_err(fbdev->dev, "failed to enable regulator\n");
- ret = -EINVAL;
- goto err_regulator;
- }
- /*获取LCD参数信息*/
- pdata = to_fb_plat(&pdev->dev);
- if (!pdata) {
- dev_err(fbdev->dev, "failed to get platform data\n");
- ret = -EINVAL;
- goto err_pdata;
- }
- fbdev->lcd = (struct s3cfb_lcd *)pdata->lcd;
- /*配置GPIO端口*/
- if (pdata->cfg_gpio)
- pdata->cfg_gpio(pdev);
- /*设置时钟参数*/
- if (pdata->clk_on)
- pdata->clk_on(pdev, &fbdev->clock);
- /*获取LCD平台设备所使用的IO端口资源,注意这个IORESOURCE_MEM标志和LCD平台设备定义中的一致*/
- res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
- if (!res) {
- dev_err(fbdev->dev, "failed to get io memory region\n");
- ret = -EINVAL;
- goto err_io;
- }
- /*申请LCD IO端口所占用的IO空间(注意理解IO空间和内存空间的区别),request_mem_region定义在ioport.h中*/
- res = request_mem_region(res->start,
- res->end - res->start + 1, pdev->name);
- if (!res) {
- dev_err(fbdev->dev, "failed to request io memory region\n");
- ret = -EINVAL;
- goto err_io;
- }
- /*将LCD的IO端口占用的这段IO空间映射到内存的虚拟地址,ioremap定义在io.h中
- 注意:IO空间要映射后才能使用,以后对虚拟地址的操作就是对IO空间的操作*/
- fbdev->regs = ioremap(res->start, res->end - res->start + 1);
- if (!fbdev->regs) {
- dev_err(fbdev->dev, "failed to remap io region\n");
- ret = -EINVAL;
- goto err_mem;
- }
- #ifdef CONFIG_FB_S3C_LTE480WV
- /*设置寄存器初始状态*/
- s3cfb_pre_init_para(fbdev);
- #endif
- /*设置gamma 值*/
- s3cfb_set_gamma(fbdev);
- /*设置VSYNC中断*/
- s3cfb_set_vsync_interrupt(fbdev, 1);
- /*设置全局中断*/
- s3cfb_set_global_interrupt(fbdev, 1);
- /*fb设备参数信息初始化*/
- s3cfb_init_global(fbdev);
- /*为framebuffer分配空间,进行内存映射,填充fb_info*/
- if (s3cfb_alloc_framebuffer(fbdev)) {
- ret = -ENOMEM;
- goto err_alloc;
- }
- /*注册fb设备到系统中*/
- if (s3cfb_register_framebuffer(fbdev)) {
- ret = -EINVAL;
- goto err_register;
- }
- s3cfb_set_clock(fbdev);
- s3cfb_set_window(fbdev, pdata->default_win, 1);
- s3cfb_display_on(fbdev);
- fbdev->irq = platform_get_irq(pdev, 0);
- if (request_irq(fbdev->irq, s3cfb_irq_frame, IRQF_SHARED,
- pdev->name, fbdev)) {
- dev_err(fbdev->dev, "request_irq failed\n");
- ret = -EINVAL;
- goto err_irq;
- }
- #ifdef CONFIG_FB_S3C_LCD_INIT
- if (pdata->backlight_on)
- pdata->backlight_on(pdev);
- if (!bootloaderfb && pdata->reset_lcd)
- pdata->reset_lcd(pdev);
- if (pdata->lcd_on)
- pdata->lcd_on(pdev);
- #endif
- #ifdef CONFIG_HAS_EARLYSUSPEND
- fbdev->early_suspend.suspend = s3cfb_early_suspend;
- fbdev->early_suspend.resume = s3cfb_late_resume;
- fbdev->early_suspend.level = EARLY_SUSPEND_LEVEL_DISABLE_FB;
- register_early_suspend(&fbdev->early_suspend);
- #endif
- /*对设备文件系统的支持,创建fb设备文件*/
- ret = device_create_file(&(pdev->dev), &dev_attr_win_power);
- if (ret < 0)
- dev_err(fbdev->dev, "failed to add sysfs entries\n");
- dev_info(fbdev->dev, "registered successfully\n");
- /*显示开机logo*/
- #if !defined(CONFIG_FRAMEBUFFER_CONSOLE) && defined(CONFIG_LOGO)
- if (fb_prepare_logo( fbdev->fb[pdata->default_win], FB_ROTATE_UR)) {
- printk("Start display and show logo\n");
- /* Start display and show logo on boot */
- fb_set_cmap(&fbdev->fb[pdata->default_win]->cmap, fbdev->fb[pdata->default_win]);
- fb_show_logo(fbdev->fb[pdata->default_win], FB_ROTATE_UR);
- }
- #endif
- return 0;
- }
七、如何阅读LCD规格书
首先我们调试LCD的时候要获得的一些参数,没必要把整个规格书通读一遍,我刚开始调试屏的时候拿到一个规格书不知道从何入手,也不知那些参数有用,比较模糊,其实只提取一些有用的信息就可以,下面这些对初学者也许有点用处。
1、GeneralSpecification
尺寸、分辨率、位数、色彩、像素时钟频率、接口类型
(1)、尺寸:

(2)、分辨率:1920 1200;
![]()
(3)、接口:双通道LVDS;
![]()
(4)、色彩:16.7M,这里可以确认数据位数8bitRGB三色:3*8=24,2的24次方=16.7M
6bitRGB 三色:3*6=18,2的18次方=262 144;
所以当看到色彩是1.7M是,说明LCD是24bit的,如果是262 144说明LCD是18bit的。
![]()
2、Timing Characteristics
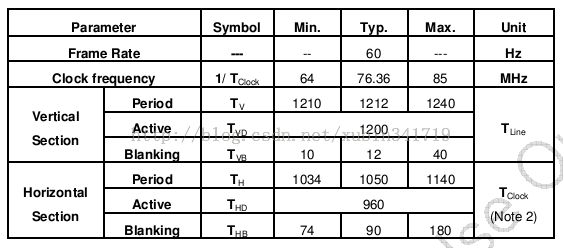
(1)、Frame rate :是60HZ,也就是帧率;
(2)、clock frequency:像素时钟,这里面有最大值、中间值和最小值,这个屏默认值为:76.36MHz;
(3)、Vertical Seciton:VSWidth +Back Porc+Front Porch,前间距、后间距。这个我们再RGB信号哪里详细解释,这个我们前面有说过;
(4)、Horizontal Section:HS Width +Back Porc+Front Porch,这个跟VS的Porch相同。
3、LCD Timing diagram信号时序图,如下所示
有些读者会问,为什么没有行、场、数据等信号。其实这个是 LVDS 信号的时序,这个根据屏厂的习惯,有的画的是 LVDS 输入的信号时序,有的是 TTL ( RGB )的时序。
上面我们以一个例子说明,做驱动的(软件方面)要知道的一些参数,如果是硬件方面的问题,可以再对一下接口。其实一个LCD规格书要了解的也就这么多,调试软件就够用:
(1)、General Specification中可得到,尺寸、分辨率、位数、色彩、像素时钟频率、接口类型;
(2)、Timing Characteristics中可以得到一些具体的参数;
(3)、LCD Timing diagram信号时序图,可以看到一些信号的时序、极性等;
八、PWM概述
1、先解释两个名词:
PWM:脉冲宽度调制(PWM),是英文“Pulse WidthModulation”的缩写,简称脉宽调制。
占空比:占空比(DutyRation)在电信领域中有如下含义:
在一串理想的脉冲周期序列中(如方波),正脉冲的持续时间与脉冲总周期的比值。例如:(假设脉冲为3V)
脉冲宽度 1μs,信号周期4μs的脉冲序列占空比为0.25,平均电压为:3*0.25=0.75V;
脉冲宽度 0μs,信号周期4μs的脉冲序列占空比为0,平均电压为:0V;
脉冲宽度 4μs,信号周期4μs的脉冲序列占空比为1,平均电压为:3V;

平均电压的变化成阶梯型变化,如果T足够小,成线性。

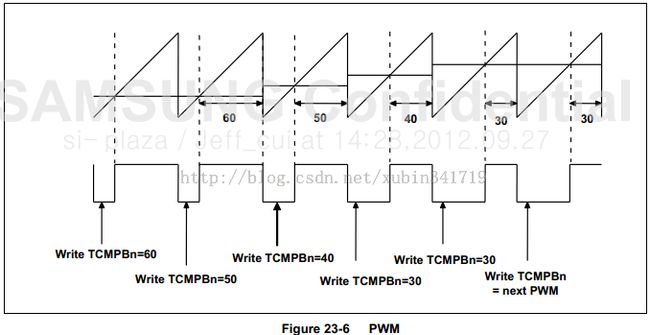
看下芯片片规格书中的描述:寄存器填不同值是,脉冲宽度不一样。
2、samusng 中的PWM控制器
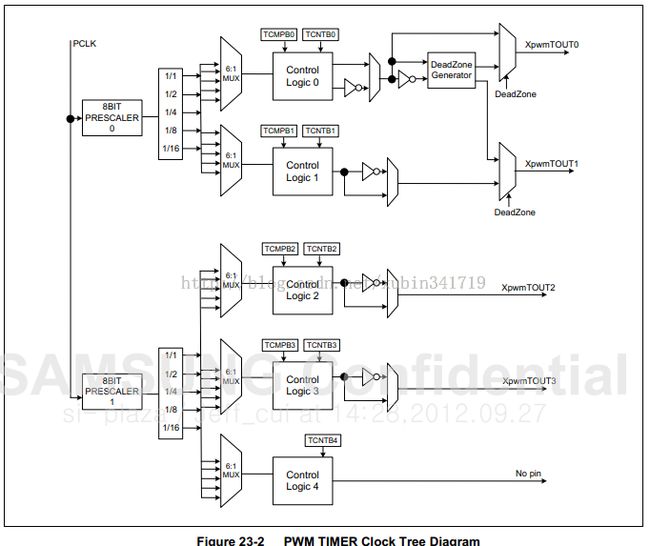
PWM时钟分频。跟单片机里面的有点像。
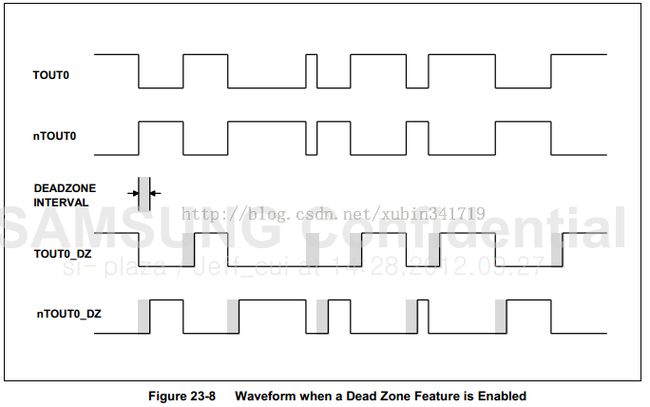
死区控制器:这个是根据晶体管的特性,设置这个功能的,不过我工作中还没有用到死区控制这块。了解有这个概念。
看这些寄存器,记得用MINI2440写裸机程序的时候,直接写这些寄存器,记得上学时把s3c2440当单片机玩,有点浪费。学生时代,已经逝去的青春??

转载自xubin341719, 感谢xubin341719的无私的奉献