Opencv--cvHoughLines2霍夫函数检测直线
cvHoughLines2
功能:
利用Hough变换在二值图像中寻找直线。
函数原型:
CvSeq* cvHonghLines2(CvArr* image,void* line_storage,int mehtod,double rho,
double theta,int threshold,double param1 =0,double param2 =0);
参数说明:
image
输入8-比特、单通道(二值)图像,当用CV_HOUGH_PROBABILISTIC方法检测的时候其内容会被函数改变。
line_storage
检测到的线段存储仓.可以是内存存储仓(此种情况下,一个线段序列在存储仓中被创建,并且由函数返回),或者是包含线段参数的特殊类型(见下面)的具有单行/单列的矩阵(CvMat*)。矩阵头为函数所修改,使得它的 cols/rows 将包含一组检测到的线段。如果 line_storage 是矩阵,而实际线段的数目超过矩阵尺寸,那么最大可能数目的线段被返回(线段没有按照长度、可信度或其它指标排序).
method
Hough 变换变量,是下面变量的其中之一:
CV_HOUGH_STANDARD - 传统或标准 Hough 变换. 每一个线段由两个浮点数 (ρ, θ) 表示,其中 ρ 是直线与原点(0,0) 之间的距离,θ 线段与 x-轴之间的夹角。因此,矩阵类型必须是 CV_32FC2 type.
CV_HOUGH_PROBABILISTIC- 概率 Hough 变换(如果图像包含一些长的线性分割,则效率更高). 它返回线段分割而不是整个线段。每个分割用起点和终点来表示,所以矩阵(或创建的序列)类型是 CV_32SC4.
CV_HOUGH_MULTI_SCALE - 传统 Hough 变换的多尺度变种。线段的编码方式与 CV_HOUGH_STANDARD 的一致。
rho
以象素为单位的距离精度,一般取1
theta
以弧度为单位角度精度,一般取CV_PI/180
threshold
阈值参数。当在一条直线上的像素点数大于threshold时,才将该直线作为检测结果显示出来。该值越大,得到直线越少。
param1
对传统 Hough 变换,不使用(0).
对概率Hough变换,它是最小线段长度.即当线段长度大于param1时,才将该线段作为检测结果显示。与上一参数类似,不过上一参数为像素数,而该参数为线段长度。
对多尺度 Hough 变换,它是距离精度 rho 的分母 (大致的距离精度是 rho 而精确的应该是 rho / param1 ).
param2
对传统 Hough 变换,不使用 (0).
对概率 Hough 变换,这个参数表示在同一条直线上进行碎线段连接的最大间隔值(gap), 即当同一条直线上的两条碎线段之间的间隔小于param2时,将其合二为一条长直线。
对多尺度 Hough 变换,它是角度精度 theta 的分母 (大致的角度精度是 theta 而精确的角度应该是 theta / param2).
以下代码为OpenCV教程自带的代码:
#include<cv.h>
#include <highgui.h>
#include <math.h>
int main(void)
{
IplImage *src = cvLoadImage("yu.jpg",0);
if (src)
{
IplImage *dst = cvCreateImage(cvGetSize(src),8,1);
IplImage *color_dst = cvCreateImage(cvGetSize(src),8,3);
CvMemStorage *storage = cvCreateMemStorage();
CvSeq *lines = 0;
int i ;
cvCanny(src,dst,50,200,3);
cvCvtColor(dst,color_dst,CV_GRAY2BGR);
#if 0
lines = cvHoughLines2(dst,storage,CV_HOUGH_STANDARD,1,CV_PI/180,150,0,0);
for (i=0;i<lines->total;i++)
{
float *line = (float *)cvGetSeqElem(lines,i);
float rho = line[0];
float theta = line[1];
CvPoint pt1,pt2;
double a = cos(theta);
double b = sin(theta);
if (fabs(a)<0.001)
{
pt1.x = pt2.x = cvRound(rho);
pt1.y = 0;
pt2.y = color_dst->height;
}
else if (fabs(b)<0.001)
{
pt1.y = pt2.y = cvRound(rho);
pt1.x = 0;
pt2.x = color_dst->width;
}
else
{
pt1.x = 0;
pt1.y = cvRound(rho/b);
pt2.x = cvRound(rho/a);
pt2.y = 0;
}
cvLine(color_dst,pt1,pt2,CV_RGB(255,0,0),1,8);
}
#else
lines = cvHoughLines2(dst,storage,CV_HOUGH_PROBABILISTIC,1,CV_PI/180,80,30,5);
for (i=0;i<lines->total;i++)
{
CvPoint *line = (CvPoint *)cvGetSeqElem(lines,i);
cvLine(color_dst,line[0],line[1],CV_RGB(255,0,0),1,CV_AA);
}
#endif
cvNamedWindow("Source");
cvShowImage("Source",src);
cvNamedWindow("Hough");
cvShowImage("Hough",color_dst);
cvWaitKey(0);
cvReleaseImage(&src);
cvReleaseImage(&dst);
cvReleaseImage(&color_dst);
cvReleaseMemStorage(&storage);
cvDestroyAllWindows();
return 1;
}
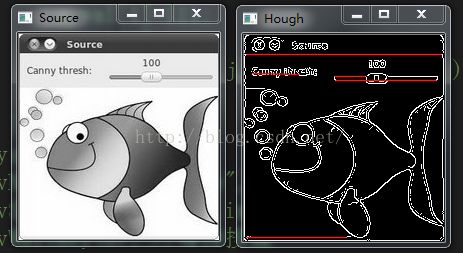
} 运行结果: