工业相机IDS开发
最近项目中要用到一款IDS的相机,型号是UI-3060CP ,这是一款USB3.0相机。IDS官网提供了不同操作系统的开发包,有相当详细开发说明。注册后便可以下载,链接为:https://en.ids-imaging.com/download-ueye-win32.html

首先下载了windows下的开发包,默认安装后可以正常打相机,然后开始尝试利用vs2010+opencv进行二次开发。
1.配置环境,ids的软件包默认安装目录为C:\Program Files\IDS\uEye
2.新建工程文件并配置链接库,vs2010下配置过程类似于opencv的配置
①【配置属性】 ->【C/C++】 ->【常规】->【附加包含目录】
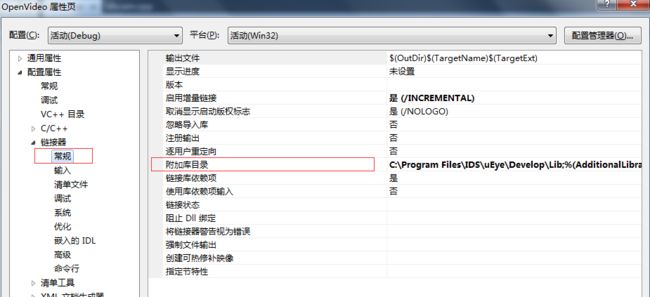
添加路径 C:\Program Files\IDS\uEye\Develop\include;②【链接器】 ->【常规】 ->【附加库目录】中
添加路径 C:\Program Files\IDS\uEye\Develop\Lib;③链接库的附加依赖项的配置:【链接器】 ->【输入】 ->【附加依赖项】中
添加
kernel32.lib user32.lib gdi32.lib winspool.lib comdlg32.lib advapi32.lib shell32.lib
ole32.lib oleaut32.lib uuid.lib odbc32.lib odbccp32.lib ueye_api.lib


3.主体程序部分,相机的使用主要包括以下部分
至此开发环境配置完成。
(1)初始化相机
通过 is_InitCamera()函数可以初始化相机,并为相机分配一个唯一的句柄,后续可以通过该句柄来访问相机。
(2)查询相机信息
is_GetCameraList();
通过is_GetSensorInfo( )函数可以获取相机传感器的信息,根据该信息可以得知相机色彩模式等可以设置的类型。
(3)选择显示模式
is_SetDisplayMode();
本款IDS相机有三种模式:Direct3D、OpenGL、位图(DIB)模式
其中Direct3D仅用于windows系统,opengl需要硬件支持、位图模式支持所有平台并可以直接访问内存。
由于需要对图像进行访问选择了位图模式,在该模式下需要手动分配内存,并在捕捉图像之前激活内存。
(4)捕捉图像
is_SetExternalTrigger();
is_CaptureVideo();
首先设定相机的预期模式分为自由运行模式和触发模式,在自由运行模式下相机传感器以设定的帧率捕捉一张张图像,并可以连续传送图像。
选择触发模式时,传感器处于待机状态,收硬件或者软件的触发信号时才开始曝光。
(5)保存图像
is_ImageFile();
(6)保存图像
只有在“与设备无关位图”(DIB)显示模式,才可以进行AVI录像。
AVI 捕捉流程图:先初始化 AVI 接口,然后创建一个空的 AVI 文件并设置相关参数。
(7)调整相机参数
- 帧率 is_SetFrameRate() 用于在自由运行模式(实况模式)下设置传感器帧率。 帧率的变化影响曝光时间的设置值范围。
- 曝光时间 is_Exposure() 用于查询相机支持的曝光时间范围并设置新的曝光时间。
- 色彩模式 is_SetColorMode() 用于设置显卡在保存或显示图像数据时所使用的色彩模式
- 色彩校正 is_SetColorCorrection()在彩色相机上, 用于在 uEye 驱动内启用色彩校正。
- 自动图像控制 is_SetAutoParameter() 用于控制自动增益、曝光快门、帧率和白平衡控制值。
- 默认值 is_ResetToDefault() 将相机参数重置为默认值。
- 保存参数 is_ParameterSet() 用于将当前相机的参数保存到文件或相机 EEPROM 中,然后从文件或EEPROM中加载参数集。
- 关闭相机 is_ExitCamera() 用于禁用hCam 相机句柄并释放uEye相机占用的数据结构和内存。
相机会自动释放经is_AllocImageMem() 函数分配的图像内存。所有之前设置的相机参数将会丢失。
- 下次打开应用程序的时候,只需使用同一函数加载设置即可。
其头文件如下:
#include "ueye.h"
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
class Idscam{
public:
Idscam();
INT InitCamera (HIDS *hCam, HWND hWnd); //初始化相机 hWnd指向显示图像窗口的指针,若用DIB模式可以令hWnd=NULL
bool OpenCamera();
void ExitCamera();
int InitDisplayMode();
void GetMaxImageSize(INT *pnSizeX, INT *pnSizeY);//查询相机支持的图像格式
void SaveImage( );
bool GetiplImgFormMem(); //从视频数据流中将图像数据拷贝给IplImage
// uEye varibles
HIDS m_hCam; // 相机句柄
HWND m_hWndDisplay; // window显示句柄
INT m_nColorMode; // Y8/RGB16/RGB24/REG32
INT m_nBitsPerPixel; // 图像位深
INT m_nSizeX; // 图像宽度
INT m_nSizeY; // 图像高度
INT m_nPosX; // 图像左偏移
INT m_nPosY; // 图像右偏移
cv::Mat CamMat;
IplImage *iplImg;
char *m_pLastBuffer;
private:
// 使用位图模式进行实时显示需要的内存
INT m_lMemoryId; // camera memory - buffer ID
char* m_pcImageMemory; // camera memory - pointer to buffer
SENSORINFO m_sInfo; // sensor information struct
INT m_nRenderMode; // render mode
INT m_nFlipHor; // 水平翻转标志
INT m_nFlipVert; // 垂直翻转标志
}; 对应实现为:
#include"Idscam.h"
#include <string>
#include <iostream>
using namespace std;
Idscam::Idscam(){
m_pcImageMemory = NULL;
m_lMemoryId = 0;
m_hCam = 0; //初始化相机句柄为0
m_nRenderMode = IS_RENDER_FIT_TO_WINDOW; //设置显示模式为适应窗口大小
m_nPosX = 0;
m_nPosY = 0;
m_nFlipHor = 0;
m_nFlipVert = 0;
iplImg=cvCreateImageHeader( cvSize(1936,1216),8,4 );
OpenCamera();
}
bool Idscam::OpenCamera(){
INT nRet = IS_NO_SUCCESS;
ExitCamera();
m_hCam = (HIDS) 0;
nRet = InitCamera(&m_hCam, m_hWndDisplay); // 1.初始化相机
if (nRet == IS_SUCCESS){ // 打开相机成功
// 查询相机所用传感器的类型
is_GetSensorInfo(m_hCam, &m_sInfo); //2.查询信息
GetMaxImageSize(&m_nSizeX, &m_nSizeY);
nRet = InitDisplayMode(); //3.选择显示模式(位图)
if (nRet == IS_SUCCESS)
{
// 允许接受消息
is_EnableMessage(m_hCam, IS_DEVICE_REMOVED, NULL);
is_EnableMessage(m_hCam, IS_DEVICE_RECONNECTED, NULL);
is_EnableMessage(m_hCam, IS_FRAME, NULL);
is_CaptureVideo( m_hCam, IS_WAIT ); //4.设定捕捉模式:自由运行模式下的实时模式
return true;
}
else{
printf("初始化显示模式失败!");
return false;
}
}
else{
printf("没有发现uEye相机!");
return false;
}
}
void Idscam:: ExitCamera()
{
if( m_hCam != 0 )
{
// 调用 hWnd = NULL函数禁用Windows消息
is_EnableMessage( m_hCam, IS_FRAME, NULL );
// 在曝光未开始时停止实时模式或取消硬件触发的图像捕捉
is_StopLiveVideo( m_hCam, IS_WAIT );
// 释放分配的图像内存
if( m_pcImageMemory != NULL )
is_FreeImageMem( m_hCam, m_pcImageMemory, m_lMemoryId );
m_pcImageMemory = NULL;
// 关闭相机
is_ExitCamera( m_hCam );
m_hCam = NULL;
}
}
//1.初始化相机
INT Idscam::InitCamera (HIDS *hCam, HWND hWnd)
{
INT nRet = is_InitCamera (hCam, hWnd);
if (nRet == IS_STARTER_FW_UPLOAD_NEEDED)//相机的启动程序固件和驱动不兼容,需要更新固件版本
{
INT nUploadTime = 25000; //默认更新时间为25S
is_GetDuration (*hCam, IS_STARTER_FW_UPLOAD, &nUploadTime);
printf("This camera requires a new firmware !\n");
printf("The upload will take about %f seconds. Please wait ...\n",nUploadTime/1000);
//再次打开相机并自动更新固件
*hCam = (HIDS) (((INT)*hCam) | IS_ALLOW_STARTER_FW_UPLOAD);
nRet = is_InitCamera (hCam, NULL);
}
printf("初始化相机成功 !\n");
return nRet;
}
int Idscam::InitDisplayMode()
{
INT nRet = IS_NO_SUCCESS;
if (m_hCam == NULL)
return IS_NO_SUCCESS;
if (m_pcImageMemory != NULL) //释放通过 is_AllocImageMem() 函数分配的图像内存
{
is_FreeImageMem( m_hCam, m_pcImageMemory, m_lMemoryId );
//如果图像内存不是通过SDK分配,则需调用 is_FreeImageMem() 函数。否则驱动会继续尝试访问该内存。
//但是这并不能释放内存。因此,必须确保可再次释放内存。
}
m_pcImageMemory = NULL;
// 设置位图模式
nRet = is_SetDisplayMode(m_hCam, IS_SET_DM_DIB);
if (m_sInfo.nColorMode == IS_COLORMODE_BAYER)
{
// 如果是拜耳色 则设置位深为当前窗口的设置,linux 下不可以这么设置
// 用于检索当前Windows桌面的颜色设置并返回每像素位深及相匹配的uEye色彩模式
is_GetColorDepth(m_hCam, &m_nBitsPerPixel, &m_nColorMode);
}
else if (m_sInfo.nColorMode == IS_COLORMODE_CBYCRY)
{
m_nColorMode = IS_CM_BGRA8_PACKED;
m_nBitsPerPixel = 32;
}
else
{
m_nColorMode = IS_CM_MONO8;
m_nBitsPerPixel = 8;
}
// 分配图像内存,图像尺寸有 m_nSizeX和m_nSizeY确定,色彩位深由m_nBitsPerPixel确定,m_pcImageMemory返回起始地址,m_lMemoryId 返回已分配内存的ID
if (is_AllocImageMem(m_hCam, m_nSizeX, m_nSizeY, m_nBitsPerPixel, &m_pcImageMemory, &m_lMemoryId ) != IS_SUCCESS)
{
printf("相机内存分配出错!");
}
else
is_SetImageMem( m_hCam, m_pcImageMemory, m_lMemoryId );
/* INT is_SetImageMem (HIDS hCam, char* pcImgMem, INT id)用于将指定的图像内存变为活动内存。
只有活动图像内存可以接收图像数据。
在调用 is_FreezeVideo() 时,捕捉的图像会存储在 pcImgMem 和 id 指定的图像缓冲区中。
捕捉的图像会存储在 pcImgMem 和 id 指定的图像缓冲区中。对于 pcImgMem,
您必须传递 is_AllocImageMem() 创建的指针,传递任何其他指针均会发出错误信息。
您可以多次传递同样的指针。 */
if (nRet == IS_SUCCESS)
{
// 设置显卡在保存或显示图像数据时所使用的色彩模
is_SetColorMode(m_hCam, m_nColorMode);
// set the image size to capture
IS_SIZE_2D imageSize;
imageSize.s32Width = m_nSizeX;
imageSize.s32Height = m_nSizeY;
//设置图像感兴趣区域(AOI)的大小和位置
is_AOI(m_hCam, IS_AOI_IMAGE_SET_SIZE, (void*)&imageSize, sizeof(imageSize));
}
return nRet;
}
void Idscam::GetMaxImageSize(INT *pnSizeX, INT *pnSizeY)
{
INT nAOISupported = 0;
BOOL bAOISupported = TRUE;
if (is_ImageFormat(m_hCam,
IMGFRMT_CMD_GET_ARBITRARY_AOI_SUPPORTED,
(void*)&nAOISupported,
sizeof(nAOISupported)) == IS_SUCCESS)
{
bAOISupported = (nAOISupported != 0);
}
if (bAOISupported)
{
// All other sensors
// Get maximum image size
SENSORINFO sInfo;
is_GetSensorInfo (m_hCam, &sInfo);
*pnSizeX = sInfo.nMaxWidth;
*pnSizeY = sInfo.nMaxHeight;
}
else
{
// Only ueye xs
// Get image size of the current format
IS_SIZE_2D imageSize;
is_AOI(m_hCam, IS_AOI_IMAGE_GET_SIZE, (void*)&imageSize, sizeof(imageSize));
*pnSizeX = imageSize.s32Width;
*pnSizeY = imageSize.s32Height;
}
}
bool Idscam::GetiplImgFormMem(){ //实时获取图像时需要不断刷新此函数
if(!m_hCam) return false;
char *pLast = NULL, *pMem = NULL;
INT dummy = 0;
//确定当前用于捕捉图像的图像内存 pMem,最后一个用于捕捉图像的图像内存pLast
is_GetActSeqBuf (m_hCam, &dummy, &pMem, &pLast);
m_pLastBuffer = pLast;
if (m_pLastBuffer)
{
iplImg->imageData = m_pLastBuffer; //将图像首地址传给iplImg
return true;
}
else
return false;
}
void Idscam::SaveImage( ){
IMAGE_FILE_PARAMS ImageFileParams;
ImageFileParams.pwchFileName = NULL;
ImageFileParams.pnImageID = NULL;
ImageFileParams.ppcImageMem = NULL;
ImageFileParams.nQuality = 0;
ImageFileParams.nFileType = IS_IMG_BMP;
INT nRet = is_ImageFile(m_hCam, IS_IMAGE_FILE_CMD_SAVE, (void*)&ImageFileParams,
sizeof(ImageFileParams));
//保存活动内存中的jpeg图像,图像画质为100
ImageFileParams.pwchFileName = L"CamIds.jpg";
ImageFileParams.nFileType = IS_IMG_JPG; //待保存文件的类型
ImageFileParams.nQuality = 100; //100为最佳图像画质(无压缩)
nRet = is_ImageFile(m_hCam, IS_IMAGE_FILE_CMD_SAVE, (void*)&ImageFileParams,
sizeof(ImageFileParams));
}
在主程序中创建一个Idscam类,默认初始化会直接打开相机,调用函数GetiplImgFormMem()和变量iplImg即可得到相机获取的图片。
这里并没有创建线程一直刷新相机,所以获取只能获取初始捕捉到的画面。
主程序为:
#include <cv.h>
#include <highgui.h>
#include"Idscam.h"
char* window_name = "Source Video";
int main()
{
Idscam *mycam;
mycam = new Idscam();
if(mycam->GetiplImgFormMem())
cvShowImage(window_name,mycam->iplImg);
cvWaitKey(3000);
return 0;
}
成功打开相机并得到相机画面。
