Android Camera HAL浅析
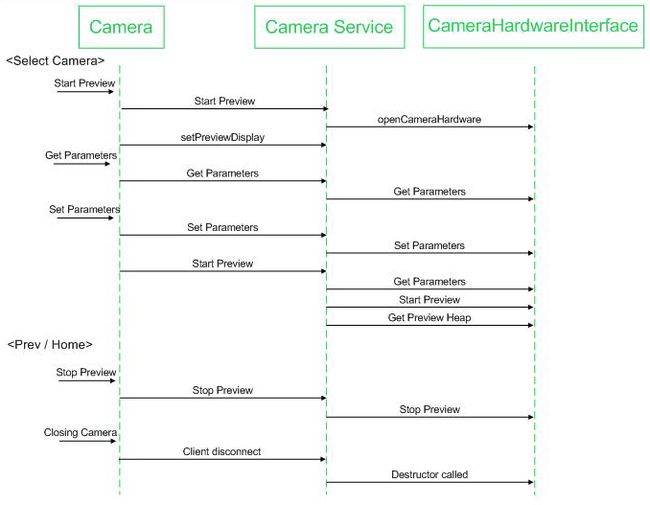
Camera工作流程图
![]()
Camera的成像原理可以简单概括如下:
景物(SCENE)通过镜头(LENS)生成的光学图像投射到图像传感器(Sensor)表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过IO接口传输到CPU中处理,通过DISPLAY就可以看到图像了。
电荷耦合器件(CCD)或互补金属氧化物半导体(CMOS)接收光学镜头传递来的影像,经模/数转换器(A/D)转换成数字信号,经过编码后存储。
流程如下:
1)、CCD/CMOS将被摄体的光信号转变为电信号—电子图像(模拟信号)
2)、由模/数转换器(ADC)芯片来将模拟信号转化为数字信号
3)、数字信号形成后,由DSP或编码库对信号进行压缩并转化为特定的图像文件格式储存
数码相机的光学镜头与传统相机相同,将影像聚到感光器件上,即(光)电荷耦合器件(CCD) 。CCD替代了传统相机中的感光胶片的位置,其功能是将光信号转换成电信号,与电视摄像相同。
CCD是半导体器件,是数码相机的核心,其内含器件的单元数量决定了数码相机的成像质量——像素,单元越多,即像素数高,成像质量越好,通常情况下像素的高低代表了数码相机的档次和技术指标。
2、Android Camera框架
Android的Camera子系统提供一个拍照和录制视频的框架。
它将Camera的上层应用与Application Framework、用户库串接起来,而正是这个用户库来与Camera的硬件层通信,从而实现操作camera硬件。
--------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------

3.Camera HAL层部分
代码存放目录:hardware\rk29\camera
编译:
LOCAL_PATH:= $(call my-dir) include $(CLEAR_VARS) LOCAL_SRC_FILES:=\ CameraHal_Module.cpp\ CameraHal.cpp\ CameraHal_Utils.cpp\ MessageQueue.cpp\ CameraHal_Mem.cpp ................... ifeq ($(strip $(TARGET_BOARD_HARDWARE)),rk30board) LOCAL_MODULE:= camera.rk30board
为了实现一个具体功能的Camera,在HAL层需要一个硬件相关的Camera库(例如通过调用video for linux驱动程序和Jpeg编码程序实现或者直接用各个chip厂商实现的私有库来实现,比如Qualcomm实现的libcamera.so和libqcamera.so),此处为camera.rk30board.so实现CameraHardwareInterface规定的接口,来调用相关的库,驱动相关的driver,实现对camera硬件的操作。这个库将被Camera的服务库libcameraservice.so调用。
3.1CameraHal_Module.cpp主要是Camera HAL对上层提供的接口,和实际设备无关,上层的本地库都直接调用这个文件里面提供的接口。
static int camera_device_open(const hw_module_t* module, const char* name,
hw_device_t** device);
static int camera_device_close(hw_device_t* device);
static int camera_get_number_of_cameras(void);
static int camera_get_camera_info(int camera_id, struct camera_info *info);
static struct hw_module_methods_t camera_module_methods = {
open: camera_device_open
};
camera_module_t HAL_MODULE_INFO_SYM = {
common: {
tag: HARDWARE_MODULE_TAG,
version_major: ((CONFIG_CAMERAHAL_VERSION&0xff00)>>8),
version_minor: CONFIG_CAMERAHAL_VERSION&0xff,
id: CAMERA_HARDWARE_MODULE_ID,
name: CAMERA_MODULE_NAME,
author: "RockChip",
methods: &camera_module_methods,
dso: NULL, /* remove compilation warnings */
reserved: {0}, /* remove compilation warnings */
},
get_number_of_cameras: camera_get_number_of_cameras,
get_camera_info: camera_get_camera_info,
};
//CAMERA_DEVICE_NAME "/dev/video" 以下都是通过读取节点信息来获取摄像头的数目及摄像头设备信息
int camera_device_close(hw_device_t* device)
{
int ret = 0;
rk_camera_device_t* rk_dev = NULL;
LOGD("%s", __FUNCTION__);
android::Mutex::Autolock lock(gCameraHalDeviceLock);
if (!device) {
ret = -EINVAL;
goto done;
}
rk_dev = (rk_camera_device_t*) device;
if (rk_dev) {
if (gCameraHals[rk_dev->cameraid]) {
delete gCameraHals[rk_dev->cameraid];
gCameraHals[rk_dev->cameraid] = NULL;
gCamerasOpen--;
}
if (rk_dev->base.ops) {
free(rk_dev->base.ops);
}
free(rk_dev);
}
done:
return ret;
}
/*******************************************************************
* implementation of camera_module functions
*******************************************************************/
/* open device handle to one of the cameras
*
* assume camera service will keep singleton of each camera
* so this function will always only be called once per camera instance
*/
int camera_device_open(const hw_module_t* module, const char* name,
hw_device_t** device)
{
int rv = 0;
int cameraid;
rk_camera_device_t* camera_device = NULL;
camera_device_ops_t* camera_ops = NULL;
android::CameraHal* camera = NULL;
android::Mutex::Autolock lock(gCameraHalDeviceLock);
LOGI("camera_device open");
if (name != NULL) {
cameraid = atoi(name);
if(cameraid > gCamerasNumber) {
LOGE("camera service provided cameraid out of bounds, "
"cameraid = %d, num supported = %d",
cameraid, gCamerasNumber);
rv = -EINVAL;
goto fail;
}
if(gCamerasOpen >= CAMERAS_SUPPORTED_SIMUL_MAX) {
LOGE("maximum number(%d) of cameras already open",gCamerasOpen);
rv = -ENOMEM;
goto fail;
}
camera_device = (rk_camera_device_t*)malloc(sizeof(*camera_device));
if(!camera_device) {
LOGE("camera_device allocation fail");
rv = -ENOMEM;
goto fail;
}
camera_ops = (camera_device_ops_t*)malloc(sizeof(*camera_ops));
if(!camera_ops) {
LOGE("camera_ops allocation fail");
rv = -ENOMEM;
goto fail;
}
memset(camera_device, 0, sizeof(*camera_device));
memset(camera_ops, 0, sizeof(*camera_ops));
camera_device->base.common.tag = HARDWARE_DEVICE_TAG;
camera_device->base.common.version = 0;
camera_device->base.common.module = (hw_module_t *)(module);
camera_device->base.common.close = camera_device_close;
camera_device->base.ops = camera_ops;
camera_ops->set_preview_window = camera_set_preview_window;
camera_ops->set_callbacks = camera_set_callbacks;
camera_ops->enable_msg_type = camera_enable_msg_type;
camera_ops->disable_msg_type = camera_disable_msg_type;
camera_ops->msg_type_enabled = camera_msg_type_enabled;
camera_ops->start_preview = camera_start_preview;
camera_ops->stop_preview = camera_stop_preview;
camera_ops->preview_enabled = camera_preview_enabled;
camera_ops->store_meta_data_in_buffers = camera_store_meta_data_in_buffers;
camera_ops->start_recording = camera_start_recording;
camera_ops->stop_recording = camera_stop_recording;
camera_ops->recording_enabled = camera_recording_enabled;
camera_ops->release_recording_frame = camera_release_recording_frame;
camera_ops->auto_focus = camera_auto_focus;
camera_ops->cancel_auto_focus = camera_cancel_auto_focus;
camera_ops->take_picture = camera_take_picture;
camera_ops->cancel_picture = camera_cancel_picture;
camera_ops->set_parameters = camera_set_parameters;
camera_ops->get_parameters = camera_get_parameters;
camera_ops->put_parameters = camera_put_parameters;
camera_ops->send_command = camera_send_command;
camera_ops->release = camera_release;
camera_ops->dump = camera_dump;
*device = &camera_device->base.common;
// -------- RockChip specific stuff --------
camera_device->cameraid = cameraid;
camera = new android::CameraHal(cameraid);
if(!camera) {
LOGE("Couldn't create instance of CameraHal class");
rv = -ENOMEM;
goto fail;
}
gCameraHals[cameraid] = camera;
gCamerasOpen++;
}
return rv;
fail:
if(camera_device) {
free(camera_device);
camera_device = NULL;
}
if(camera_ops) {
free(camera_ops);
camera_ops = NULL;
}
if(camera) {
delete camera;
camera = NULL;
}
*device = NULL;
return rv;
}
int camera_get_number_of_cameras(void)
{
char cam_path[20];
char cam_num[3],i;
int cam_cnt=0,fd=-1,rk29_cam[CAMERAS_SUPPORT_MAX];
struct v4l2_capability capability;
rk_cam_info_t camInfoTmp[CAMERAS_SUPPORT_MAX];
char *ptr,**ptrr;
char version[PROPERTY_VALUE_MAX];
if (gCamerasNumber > 0)
goto camera_get_number_of_cameras_end;
memset(version,0x00,sizeof(version));
sprintf(version,"%d.%d.%d",((CONFIG_CAMERAHAL_VERSION&0xff0000)>>16),
((CONFIG_CAMERAHAL_VERSION&0xff00)>>8),CONFIG_CAMERAHAL_VERSION&0xff);
property_set(CAMERAHAL_VERSION_PROPERTY_KEY,version);
memset(&camInfoTmp[0],0x00,sizeof(rk_cam_info_t));
memset(&camInfoTmp[1],0x00,sizeof(rk_cam_info_t));
for (i=0; i<10; i++) {
cam_path[0] = 0x00;
strcat(cam_path, CAMERA_DEVICE_NAME);
sprintf(cam_num, "%d", i);
strcat(cam_path,cam_num);
fd = open(cam_path, O_RDONLY);
if (fd < 0)
break;
memset(&capability, 0, sizeof(struct v4l2_capability));
if (ioctl(fd, VIDIOC_QUERYCAP, &capability) < 0) {
LOGE("Video device(%s): query capability not supported.\n",cam_path);
goto loop_continue;
}
if ((capability.capabilities & (V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_STREAMING)) != (V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_STREAMING)) {
LOGD("Video device(%s): video capture not supported.\n",cam_path);
} else {
memset(camInfoTmp[cam_cnt&0x01].device_path,0x00, sizeof(camInfoTmp[cam_cnt&0x01].device_path));
strcat(camInfoTmp[cam_cnt&0x01].device_path,cam_path);
memset(camInfoTmp[cam_cnt&0x01].fival_list,0x00, sizeof(camInfoTmp[cam_cnt&0x01].fival_list));
memcpy(camInfoTmp[cam_cnt&0x01].driver,capability.driver, sizeof(camInfoTmp[cam_cnt&0x01].driver));
camInfoTmp[cam_cnt&0x01].version = capability.version;
if (strstr((char*)&capability.card[0], "front") != NULL) {
camInfoTmp[cam_cnt&0x01].facing_info.facing = CAMERA_FACING_FRONT;
} else {
camInfoTmp[cam_cnt&0x01].facing_info.facing = CAMERA_FACING_BACK;
}
ptr = strstr((char*)&capability.card[0],"-");
if (ptr != NULL) {
ptr++;
camInfoTmp[cam_cnt&0x01].facing_info.orientation = atoi(ptr);
} else {
camInfoTmp[cam_cnt&0x01].facing_info.orientation = 0;
}
cam_cnt++;
memset(version,0x00,sizeof(version));
sprintf(version,"%d.%d.%d",((capability.version&0xff0000)>>16),
((capability.version&0xff00)>>8),capability.version&0xff);
property_set(CAMERADRIVER_VERSION_PROPERTY_KEY,version);
LOGD("%s(%d): %s:%s",__FUNCTION__,__LINE__,CAMERADRIVER_VERSION_PROPERTY_KEY,version);
if (cam_cnt >= CAMERAS_SUPPORT_MAX)
i = 10;
}
loop_continue:
if (fd > 0) {
close(fd);
fd = -1;
}
continue;
}
//zyc , change the camera infomation if there is a usb camera
if((strcmp(camInfoTmp[0].driver,"uvcvideo") == 0)) {
camInfoTmp[0].facing_info.facing = (camInfoTmp[1].facing_info.facing == CAMERA_FACING_FRONT) ? CAMERA_FACING_BACK:CAMERA_FACING_FRONT;
camInfoTmp[0].facing_info.orientation = (camInfoTmp[0].facing_info.facing == CAMERA_FACING_FRONT)?270:90;
} else if((strcmp(camInfoTmp[1].driver,"uvcvideo") == 0)) {
camInfoTmp[1].facing_info.facing = (camInfoTmp[0].facing_info.facing == CAMERA_FACING_FRONT) ? CAMERA_FACING_BACK:CAMERA_FACING_FRONT;
camInfoTmp[1].facing_info.orientation = (camInfoTmp[1].facing_info.facing == CAMERA_FACING_FRONT)?270:90;
}
gCamerasNumber = cam_cnt;
#if CONFIG_AUTO_DETECT_FRAMERATE
rk29_cam[0] = 0xff;
rk29_cam[1] = 0xff;
for (i=0; i<cam_cnt; i++) {
if (strcmp((char*)&camInfoTmp[i].driver[0],"rk29xx-camera") == 0) {
if (strcmp((char*)&camInfoTmp[i].driver[0],(char*)&gCamInfos[i].driver[0]) != 0) {
rk29_cam[i] = i;
}
} else {
rk29_cam[i] = 0xff;
}
}
if ((rk29_cam[0] != 0xff) || (rk29_cam[1] != 0xff)) {
if (gCameraFpsDetectThread == NULL) {
gCameraFpsDetectThread = new CameraFpsDetectThread();
LOGD("%s create CameraFpsDetectThread for enum camera framerate!!",__FUNCTION__);
gCameraFpsDetectThread->run("CameraFpsDetectThread", ANDROID_PRIORITY_AUDIO);
}
}
#endif
#if CONFIG_CAMERA_SINGLE_SENSOR_FORCE_BACK_FOR_CTS
if ((gCamerasNumber==1) && (camInfoTmp[0].facing_info.facing==CAMERA_FACING_FRONT)) {
gCamerasNumber = 2;
memcpy(&camInfoTmp[1],&camInfoTmp[0], sizeof(rk_cam_info_t));
camInfoTmp[1].facing_info.facing = CAMERA_FACING_BACK;
}
#endif
memcpy(&gCamInfos[0], &camInfoTmp[0], sizeof(rk_cam_info_t));
memcpy(&gCamInfos[1], &camInfoTmp[1], sizeof(rk_cam_info_t));
camera_get_number_of_cameras_end:
LOGD("%s(%d): Current board have %d cameras attached.",__FUNCTION__, __LINE__, gCamerasNumber);
return gCamerasNumber;
}
int camera_get_camera_info(int camera_id, struct camera_info *info)
{
int rv = 0,fp;
int face_value = CAMERA_FACING_BACK;
int orientation = 0;
char process_name[30];
if(camera_id > gCamerasNumber) {
LOGE("%s camera_id out of bounds, camera_id = %d, num supported = %d",__FUNCTION__,
camera_id, gCamerasNumber);
rv = -EINVAL;
goto end;
}
info->facing = gCamInfos[camera_id].facing_info.facing;
info->orientation = gCamInfos[camera_id].facing_info.orientation;
end:
LOGD("%s(%d): camera_%d facing(%d), orientation(%d)",__FUNCTION__,__LINE__,camera_id,info->facing,info->orientation);
return rv;
}而对于为上层提供的HAL层接口函数,并不直接操作节点,而是间接的去调用CameraHal.cpp去操作节点。
int camera_start_preview(struct camera_device * device)
{
int rv = -EINVAL;
rk_camera_device_t* rk_dev = NULL;
LOGV("%s", __FUNCTION__);
if(!device)
return rv;
rk_dev = (rk_camera_device_t*) device;
rv = gCameraHals[rk_dev->cameraid]->startPreview();
return rv;
}
void camera_stop_preview(struct camera_device * device)
{
rk_camera_device_t* rk_dev = NULL;
LOGV("%s", __FUNCTION__);
if(!device)
return;
rk_dev = (rk_camera_device_t*) device;
gCameraHals[rk_dev->cameraid]->stopPreview();
}
3.2CameraHal.cpp去操作节点来进行实际的操作。
//这个几个线程很关键,分别对应着各种不同的情况,但是一直在运行
CameraHal::CameraHal(int cameraId)
:mParameters(),
mSnapshotRunning(-1),
mCommandRunning(-1),
mPreviewRunning(STA_PREVIEW_PAUSE),
mPreviewLock(),
mPreviewCond(),
mDisplayRuning(STA_DISPLAY_PAUSE),
mDisplayLock(),
mDisplayCond(),
mANativeWindowLock(),
mANativeWindowCond(),
mANativeWindow(NULL),
mPreviewErrorFrameCount(0),
mPreviewFrameSize(0),
mCamDriverFrmHeightMax(0),
mCamDriverFrmWidthMax(0),
mPreviewBufferCount(0),
mCamDriverPreviewFmt(0),
mCamDriverPictureFmt(0),
mCamDriverV4l2BufferLen(0),
mPreviewMemory(NULL),
mRawBufferSize(0),
mJpegBufferSize(0),
mMsgEnabled(0),
mEffect_number(0),
mScene_number(0),
mWhiteBalance_number(0),
mFlashMode_number(0),
mGps_latitude(-1),
mGps_longitude(-1),
mGps_altitude(-1),
mGps_timestamp(-1),
displayThreadCommandQ("displayCmdQ"),
displayThreadAckQ("displayAckQ"),
previewThreadCommandQ("previewCmdQ"),
previewThreadAckQ("previewAckQ"),
commandThreadCommandQ("commandCmdQ"),
commandThreadAckQ("commandAckQ"),
snapshotThreadCommandQ("snapshotCmdQ"),
snapshotThreadAckQ("snapshotAckQ"),
mCamBuffer(NULL)
{
int fp,i;
cameraCallProcess[0] = 0x00;
sprintf(cameraCallProcess,"/proc/%d/cmdline",getCallingPid());
fp = open(cameraCallProcess, O_RDONLY);
if (fp < 0) {
memset(cameraCallProcess,0x00,sizeof(cameraCallProcess));
LOGE("Obtain calling process info failed");
} else {
memset(cameraCallProcess,0x00,sizeof(cameraCallProcess));
read(fp, cameraCallProcess, 30);
close(fp);
fp = -1;
LOGD("Calling process is: %s",cameraCallProcess);
}
iCamFd = -1;
memset(&mCamDriverSupportFmt[0],0, sizeof(mCamDriverSupportFmt));
mRecordRunning = false;
mPictureRunning = STA_PICTURE_STOP;
mExitAutoFocusThread = false;
mDriverMirrorSupport = false;
mDriverFlipSupport = false;
mPreviewCmdReceived = false;
mPreviewStartTimes = 0x00;
memset(mCamDriverV4l2Buffer, 0x00, sizeof(mCamDriverV4l2Buffer));
memset(mDisplayFormat,0x00,sizeof(mDisplayFormat));
for (i=0; i<CONFIG_CAMERA_PRVIEW_BUF_CNT; i++) {
mPreviewBufferMap[i] = NULL;
mDisplayBufferMap[i] = NULL;
memset(&mGrallocBufferMap[i],0x00,sizeof(rk_previewbuf_info_t));
mPreviewBufs[i] = NULL;
mVideoBufs[i] = NULL;
mPreviewBuffer[i] = NULL;
}
//open the rga device,zyc
mRGAFd = -1;
if (cameraCreate(cameraId) == 0) {
initDefaultParameters();
cameraRawJpegBufferCreate(mRawBufferSize,mJpegBufferSize);
mDisplayThread = new DisplayThread(this);
mPreviewThread = new PreviewThread(this);
mCommandThread = new CommandThread(this);
mPictureThread = new PictureThread(this);
mSnapshotThread = new SnapshotThread(this);
mAutoFocusThread = new AutoFocusThread(this);
mDisplayThread->run("CameraDispThread",ANDROID_PRIORITY_URGENT_DISPLAY);
mPreviewThread->run("CameraPreviewThread",ANDROID_PRIORITY_DISPLAY);
mCommandThread->run("CameraCmdThread", ANDROID_PRIORITY_URGENT_DISPLAY);
mAutoFocusThread->run("CameraAutoFocusThread", ANDROID_PRIORITY_DISPLAY);
mSnapshotThread->run("CameraSnapshotThread", ANDROID_PRIORITY_NORMAL);
LOGD("CameraHal create success!");
} else {
mPreviewThread = NULL;
mDisplayThread = NULL;
mCommandThread = NULL;
mPictureThread = NULL;
mSnapshotThread = NULL;
mAutoFocusThread = NULL;
}
}
初始化时参数的配置,默认参数图片大小,分辨率,帧等:
void CameraHal::initDefaultParameters()
{
CameraParameters params;
String8 parameterString;
int i,j,previewFrameSizeMax;
char cur_param[32],cam_size[10];
char str_picturesize[100];//We support at most 4 resolutions: 2592x1944,2048x1536,1600x1200,1024x768
int ret,picture_size_bit;
struct v4l2_format fmt;
LOG_FUNCTION_NAME
memset(str_picturesize,0x00,sizeof(str_picturesize));
if (CAMERA_IS_UVC_CAMERA()) {
/*preview size setting*/
struct v4l2_frmsizeenum fsize;
memset(&fsize, 0, sizeof(fsize));
picture_size_bit = 0;
fsize.index = 0;
fsize.pixel_format = mCamDriverPreviewFmt;
while ((ret = ioctl(iCamFd, VIDIOC_ENUM_FRAMESIZES, &fsize)) == 0) {
if (fsize.type == V4L2_FRMSIZE_TYPE_DISCRETE) {
if ((fsize.discrete.width == 320) && (fsize.discrete.height == 240)) {
if (strcmp(cameraCallProcess,"com.tencent.android.pad") == 0) {
fsize.index++;
continue;
}
}
memset(cam_size,0x00,sizeof(cam_size));
if (parameterString.size() != 0)
cam_size[0]=',';
sprintf((char*)(&cam_size[strlen(cam_size)]),"%d",fsize.discrete.width);
strcat(cam_size, "x");
sprintf((char*)(&cam_size[strlen(cam_size)]),"%d",fsize.discrete.height);
parameterString.append((const char*)cam_size);
if ((strlen(str_picturesize)+strlen(cam_size))<sizeof(str_picturesize)) {
if (fsize.discrete.width <= 2592) {
strcat(str_picturesize, cam_size);
if (fsize.discrete.width > mCamDriverFrmWidthMax) {
mCamDriverFrmWidthMax = fsize.discrete.width;
mCamDriverFrmHeightMax = fsize.discrete.height;
}
}
} else {
break;
}
} else if (fsize.type == V4L2_FRMSIZE_TYPE_CONTINUOUS) {
break;
} else if (fsize.type == V4L2_FRMSIZE_TYPE_STEPWISE) {
break;
}
fsize.index++;
}
if (ret != 0 && errno != EINVAL) {
LOGE("ERROR enumerating frame sizes: %d\n", errno);
}
params.set(CameraParameters::KEY_SUPPORTED_PREVIEW_SIZES, parameterString.string());
params.setPreviewSize(640,480);
/*picture size setting*/
params.set(CameraParameters::KEY_SUPPORTED_PICTURE_SIZES, str_picturesize);
params.setPictureSize(mCamDriverFrmWidthMax, mCamDriverFrmHeightMax);
if (mCamDriverFrmWidthMax <= 1024) {
mRawBufferSize = RAW_BUFFER_SIZE_1M;
mJpegBufferSize = JPEG_BUFFER_SIZE_1M;
} else if (mCamDriverFrmWidthMax <= 1600) {
mRawBufferSize = RAW_BUFFER_SIZE_2M;
mJpegBufferSize = JPEG_BUFFER_SIZE_2M;
} else if (mCamDriverFrmWidthMax <= 2048) {
mRawBufferSize = RAW_BUFFER_SIZE_3M;
mJpegBufferSize = JPEG_BUFFER_SIZE_3M;
} else if (mCamDriverFrmWidthMax <= 2592) {
mRawBufferSize = RAW_BUFFER_SIZE_5M;
mJpegBufferSize = JPEG_BUFFER_SIZE_5M;
} else {
LOGE("%s(%d):Camera Hal is only support 5Mega camera, but the uvc camera is %dx%d",
__FUNCTION__,__LINE__,mCamDriverFrmWidthMax, mCamDriverFrmHeightMax);
mRawBufferSize = RAW_BUFFER_SIZE_5M;
mJpegBufferSize = JPEG_BUFFER_SIZE_5M;
}
/* set framerate */
struct v4l2_streamparm setfps;
memset(&setfps, 0, sizeof(struct v4l2_streamparm));
setfps.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
setfps.parm.capture.timeperframe.numerator=1;
setfps.parm.capture.timeperframe.denominator=15;
ret = ioctl(iCamFd, VIDIOC_S_PARM, &setfps);
/*frame rate setting*/
params.set(CameraParameters::KEY_SUPPORTED_PREVIEW_FRAME_RATES, "15");
params.setPreviewFrameRate(15);
/*frame per second setting*/
parameterString = "15000,15000";
params.set(CameraParameters::KEY_PREVIEW_FPS_RANGE, parameterString.string());
parameterString = "(15000,15000)";
params.set(CameraParameters::KEY_SUPPORTED_PREVIEW_FPS_RANGE, parameterString.string());
/*not support zoom */
params.set(CameraParameters::KEY_ZOOM_SUPPORTED, "false");
} else if (CAMERA_IS_RKSOC_CAMERA()) {
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.pixelformat= mCamDriverPreviewFmt;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
/*picture size setting*/
fmt.fmt.pix.width = 10000;
fmt.fmt.pix.height = 10000;
ret = ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt);
mCamDriverFrmWidthMax = fmt.fmt.pix.width;
mCamDriverFrmHeightMax = fmt.fmt.pix.height;
if (mCamDriverFrmWidthMax > 2592) {
LOGE("Camera driver support maximum resolution(%dx%d) is overflow 5Mega!",mCamDriverFrmWidthMax,mCamDriverFrmHeightMax);
mCamDriverFrmWidthMax = 2592;
mCamDriverFrmHeightMax = 1944;
}
/*preview size setting*/
if (mCamDriverFrmWidthMax >= 176) {
fmt.fmt.pix.width = 176;
fmt.fmt.pix.height = 144;
if (ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt) == 0) {
if ((fmt.fmt.pix.width == 176) && (fmt.fmt.pix.height == 144)) {
parameterString.append("176x144");
params.setPreviewSize(176, 144);
previewFrameSizeMax = PAGE_ALIGN(176*144*2)*2; // 176*144*2 rgb565
//params.set(CameraParameters::KEY_PREFERRED_PREVIEW_SIZE_FOR_VIDEO,"176x144");
}
}
}
if ((mCamDriverCapability.version & 0xff) >= 0x07) {
int tmp0,tmp1;
if (cameraFramerateQuery(mCamDriverPreviewFmt, 240,160,&tmp1,&tmp0) == 0) {
if (mCamDriverFrmWidthMax >= 240) {
fmt.fmt.pix.width = 240;
fmt.fmt.pix.height = 160;
if (ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt) == 0) {
if ((fmt.fmt.pix.width == 240) && (fmt.fmt.pix.height == 160)) {
parameterString.append(",240x160");
params.setPreviewSize(240, 160);
previewFrameSizeMax = PAGE_ALIGN(240*160*2)*2; // 240*160*2 rgb565
}
}
}
}
}
if (strcmp(cameraCallProcess,"com.tencent.android.pad")) {
if (mCamDriverFrmWidthMax >= 320) {
fmt.fmt.pix.width = 320;
fmt.fmt.pix.height = 240;
if (ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt) == 0) {
if ((fmt.fmt.pix.width == 320) && (fmt.fmt.pix.height == 240)) {
parameterString.append(",320x240");
params.setPreviewSize(320, 240);
previewFrameSizeMax = PAGE_ALIGN(320*240*2)*2; // 320*240*2
}
}
}
}
if (mCamDriverFrmWidthMax >= 352) {
fmt.fmt.pix.width = 352;
fmt.fmt.pix.height = 288;
if (ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt) == 0) {
if ((fmt.fmt.pix.width == 352) && (fmt.fmt.pix.height == 288)) {
parameterString.append(",352x288");
params.setPreviewSize(352, 288);
previewFrameSizeMax = PAGE_ALIGN(352*288*2)*2; // 352*288*1.5*2
}
}
}
if (mCamDriverFrmWidthMax >= 640) {
fmt.fmt.pix.width = 640;
fmt.fmt.pix.height = 480;
if (ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt) == 0) {
if ((fmt.fmt.pix.width == 640) && (fmt.fmt.pix.height == 480)) {
parameterString.append(",640x480");
params.setPreviewSize(640, 480);
previewFrameSizeMax = PAGE_ALIGN(640*480*2)*2; // 640*480*1.5*2
}
}
}
if (mCamDriverFrmWidthMax >= 720) {
fmt.fmt.pix.width = 720;
fmt.fmt.pix.height = 480;
if (ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt) == 0) {
if ((fmt.fmt.pix.width == 720) && (fmt.fmt.pix.height == 480)) {
parameterString.append(",720x480");
previewFrameSizeMax = PAGE_ALIGN(720*480*2)*2; // 720*480*1.5*2
}
}
}
if (mCamDriverFrmWidthMax >= 1280) {
fmt.fmt.pix.width = 1280;
fmt.fmt.pix.height = 720;
if (ioctl(iCamFd, VIDIOC_TRY_FMT, &fmt) == 0) {
if ((fmt.fmt.pix.width == 1280) && (fmt.fmt.pix.height == 720)) {
parameterString.append(",1280x720");
previewFrameSizeMax = PAGE_ALIGN(1280*720*2)*2; // 1280*720*1.5*2
}
}
}
mSupportPreviewSizeReally = parameterString;
/* [email protected]: Facelock speed is low, so scale down preview data to facelock for speed up */
if ((strcmp(cameraCallProcess,"com.android.facelock")==0)) {
if (strstr(mSupportPreviewSizeReally.string(),"640x480")||
strstr(mSupportPreviewSizeReally.string(),"320x240")) {
parameterString = "160x120";
params.setPreviewSize(160, 120);
}
}
params.set(CameraParameters::KEY_SUPPORTED_PREVIEW_SIZES, parameterString.string());
strcat(str_picturesize,parameterString.string());
strcat(str_picturesize,",");
if(mCamDriverFrmWidthMax <= 640){
strcat( str_picturesize,"640x480,320x240");
mRawBufferSize = RAW_BUFFER_SIZE_0M3;
mJpegBufferSize = JPEG_BUFFER_SIZE_0M3;
params.setPictureSize(640,480);
}else if (mCamDriverFrmWidthMax <= 1280) {
strcat( str_picturesize,"1024x768,640x480,320x240");
mRawBufferSize = RAW_BUFFER_SIZE_1M;
mJpegBufferSize = JPEG_BUFFER_SIZE_1M;
params.setPictureSize(1024,768);
} else if (mCamDriverFrmWidthMax <= 1600) {
strcat( str_picturesize,"1600x1200,1024x768,640x480");
mRawBufferSize = RAW_BUFFER_SIZE_2M;
mJpegBufferSize = JPEG_BUFFER_SIZE_2M;
params.setPictureSize(1600,1200);
} else if (mCamDriverFrmWidthMax <= 2048) {
strcat( str_picturesize,"2048x1536,1600x1200,1024x768");
mRawBufferSize = RAW_BUFFER_SIZE_3M;
mJpegBufferSize = JPEG_BUFFER_SIZE_3M;
params.setPictureSize(2048,1536);
} else if (mCamDriverFrmWidthMax <= 2592) {
strcat( str_picturesize,"2592x1944,2048x1536,1600x1200,1024x768");
params.setPictureSize(2592,1944);
mRawBufferSize = RAW_BUFFER_SIZE_5M;
mJpegBufferSize = JPEG_BUFFER_SIZE_5M;
} else {
sprintf(str_picturesize, "%dx%d", mCamDriverFrmWidthMax,mCamDriverFrmHeightMax);
mRawBufferSize = RAW_BUFFER_SIZE_5M;
mJpegBufferSize = JPEG_BUFFER_SIZE_5M;
params.setPictureSize(mCamDriverFrmWidthMax,mCamDriverFrmHeightMax);
}
params.set(CameraParameters::KEY_SUPPORTED_PICTURE_SIZES, str_picturesize);
/*frame rate setting*/
cameraFpsInfoSet(params);
/*zoom setting*/
struct v4l2_queryctrl zoom;
char str_zoom_max[3],str_zoom_element[5];
char str_zoom[200];
strcpy(str_zoom, "");//default zoom
int max;
zoom.id = V4L2_CID_ZOOM_ABSOLUTE;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &zoom)) {
mZoomMax = zoom.maximum;
mZoomMin= zoom.minimum;
mZoomStep = zoom.step;
max = (mZoomMax - mZoomMin)/mZoomStep;
sprintf(str_zoom_max,"%d",max);
params.set(CameraParameters::KEY_ZOOM_SUPPORTED, "true");
params.set(CameraParameters::KEY_MAX_ZOOM, str_zoom_max);
params.set(CameraParameters::KEY_ZOOM, "0");
for (i=mZoomMin; i<=mZoomMax; i+=mZoomStep) {
sprintf(str_zoom_element,"%d,", i);
strcat(str_zoom,str_zoom_element);
}
params.set(CameraParameters::KEY_ZOOM_RATIOS, str_zoom);
}
}
/*preview format setting*/
params.set(CameraParameters::KEY_SUPPORTED_PREVIEW_FORMATS, "yuv420sp,rgb565,yuv420p");
params.set(CameraParameters::KEY_VIDEO_FRAME_FORMAT,CameraParameters::PIXEL_FORMAT_YUV420SP);
if (strcmp(cameraCallProcess,"com.android.camera")==0) { //for PanoramaActivity
params.setPreviewFormat(CameraParameters::PIXEL_FORMAT_RGB565);
} else {
params.setPreviewFormat(CameraParameters::PIXEL_FORMAT_YUV420SP);
}
/* [email protected]: preset the displayformat for cts */
strcpy(mDisplayFormat,CAMERA_DISPLAY_FORMAT_NV12);
params.set(CameraParameters::KEY_VIDEO_FRAME_FORMAT,CameraParameters::PIXEL_FORMAT_YUV420SP);
/*picture format setting*/
params.set(CameraParameters::KEY_SUPPORTED_PICTURE_FORMATS, CameraParameters::PIXEL_FORMAT_JPEG);
params.setPictureFormat(CameraParameters::PIXEL_FORMAT_JPEG);
/*jpeg quality setting*/
params.set(CameraParameters::KEY_JPEG_QUALITY, "70");
/*white balance setting*/
struct v4l2_queryctrl whiteBalance;
struct v4l2_querymenu *whiteBalance_menu = mWhiteBalance_menu;
char str_whitebalance[200];
strcpy(str_whitebalance, "");//default whitebalance
whiteBalance.id = V4L2_CID_DO_WHITE_BALANCE;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &whiteBalance)) {
for (i = whiteBalance.minimum; i <= whiteBalance.maximum; i += whiteBalance.step) {
whiteBalance_menu->id = V4L2_CID_DO_WHITE_BALANCE;
whiteBalance_menu->index = i;
if (!ioctl(iCamFd, VIDIOC_QUERYMENU, whiteBalance_menu)) {
if (i != whiteBalance.minimum)
strcat(str_whitebalance, ",");
strcat(str_whitebalance, (char *)whiteBalance_menu->name);
if (whiteBalance.default_value == i) {
strcpy(cur_param, (char *)whiteBalance_menu->name);
}
mWhiteBalance_number++;
}
whiteBalance_menu++;
}
params.set(CameraParameters::KEY_SUPPORTED_WHITE_BALANCE, str_whitebalance);
params.set(CameraParameters::KEY_WHITE_BALANCE, cur_param);
}
/*color effect setting*/
struct v4l2_queryctrl effect;
struct v4l2_querymenu *effect_menu = mEffect_menu;
char str_effect[200];
strcpy(str_effect, "");//default effect
effect.id = V4L2_CID_EFFECT;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &effect)) {
for (i = effect.minimum; i <= effect.maximum; i += effect.step) {
effect_menu->id = V4L2_CID_EFFECT;
effect_menu->index = i;
if (!ioctl(iCamFd, VIDIOC_QUERYMENU, effect_menu)) {
if (i != effect.minimum)
strcat(str_effect, ",");
strcat(str_effect, (char *)effect_menu->name);
if (effect.default_value == i) {
strcpy(cur_param, (char *)effect_menu->name);
}
mEffect_number++;
}
effect_menu++;
}
params.set(CameraParameters::KEY_SUPPORTED_EFFECTS, str_effect);
params.set(CameraParameters::KEY_EFFECT, cur_param);
}
/*scene setting*/
struct v4l2_queryctrl scene;
struct v4l2_querymenu *scene_menu = mScene_menu;
char str_scene[200];
strcpy(str_scene, "");//default scene
scene.id = V4L2_CID_SCENE;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &scene)) {
for (i=scene.minimum; i<=scene.maximum; i+=scene.step) {
scene_menu->id = V4L2_CID_SCENE;
scene_menu->index = i;
if (!ioctl(iCamFd, VIDIOC_QUERYMENU, scene_menu)) {
if (i != scene.minimum)
strcat(str_scene, ",");
strcat(str_scene, (char *)scene_menu->name);
if (scene.default_value == i) {
strcpy(cur_param, (char *)scene_menu->name);
}
mScene_number++;
}
scene_menu++;
}
params.set(CameraParameters::KEY_SUPPORTED_SCENE_MODES, str_scene);
params.set(CameraParameters::KEY_SCENE_MODE, cur_param);
}
/*flash mode setting*/
struct v4l2_queryctrl flashMode;
struct v4l2_querymenu *flashMode_menu = mFlashMode_menu;
char str_flash[200];
strcpy(str_flash, "");//default flash
flashMode.id = V4L2_CID_FLASH;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &flashMode)) {
for (i = flashMode.minimum; i <= flashMode.maximum; i += flashMode.step) {
flashMode_menu->id = V4L2_CID_FLASH;
flashMode_menu->index = i;
if (!ioctl(iCamFd, VIDIOC_QUERYMENU, flashMode_menu)) {
if (i != flashMode.minimum)
strcat(str_flash, ",");
strcat(str_flash, (char *)flashMode_menu->name);
if (flashMode.default_value == i) {
strcpy(cur_param, (char *)flashMode_menu->name);
}
mFlashMode_number++;
}
flashMode_menu++;
}
params.set(CameraParameters::KEY_SUPPORTED_FLASH_MODES, str_flash);
params.set(CameraParameters::KEY_FLASH_MODE, cur_param);
}
/*focus mode setting*/
struct v4l2_queryctrl focus;
parameterString = CameraParameters::FOCUS_MODE_FIXED;
params.set(CameraParameters::KEY_FOCUS_MODE, CameraParameters::FOCUS_MODE_FIXED);
focus.id = V4L2_CID_FOCUS_AUTO;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &focus)) {
parameterString.append(",");
parameterString.append(CameraParameters::FOCUS_MODE_AUTO);
params.set(CameraParameters::KEY_FOCUS_MODE, CameraParameters::FOCUS_MODE_AUTO);
}
focus.id = V4L2_CID_FOCUS_CONTINUOUS;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &focus)) {
parameterString.append(",");
parameterString.append(CameraParameters::FOCUS_MODE_EDOF);
}
focus.id = V4L2_CID_FOCUS_ABSOLUTE;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &focus)) {
parameterString.append(",");
parameterString.append(CameraParameters::FOCUS_MODE_INFINITY);
parameterString.append(",");
parameterString.append(CameraParameters::FOCUS_MODE_MACRO);
}
params.set(CameraParameters::KEY_SUPPORTED_FOCUS_MODES, parameterString.string());
/*mirror and flip query*/
struct v4l2_queryctrl mirror,flip;
mirror.id = V4L2_CID_HFLIP;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &mirror)) {
mDriverMirrorSupport = true;
} else {
mDriverMirrorSupport = false;
}
flip.id = V4L2_CID_VFLIP;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &flip)) {
mDriverFlipSupport = true;
} else {
mDriverFlipSupport = false;
}
/*Exposure setting*/
struct v4l2_queryctrl exposure;
char str_exposure[16];
exposure.id = V4L2_CID_EXPOSURE;
if (!ioctl(iCamFd, VIDIOC_QUERYCTRL, &exposure)) {
sprintf(str_exposure,"%d",exposure.default_value);
params.set(CameraParameters::KEY_EXPOSURE_COMPENSATION, str_exposure);
sprintf(str_exposure,"%d",exposure.maximum);
params.set(CameraParameters::KEY_MAX_EXPOSURE_COMPENSATION, str_exposure);
sprintf(str_exposure,"%d",exposure.minimum);
params.set(CameraParameters::KEY_MIN_EXPOSURE_COMPENSATION, str_exposure);
sprintf(str_exposure,"%d",exposure.step);
params.set(CameraParameters::KEY_EXPOSURE_COMPENSATION_STEP, str_exposure);
} else {
params.set(CameraParameters::KEY_EXPOSURE_COMPENSATION, "0");
params.set(CameraParameters::KEY_MAX_EXPOSURE_COMPENSATION, "0");
params.set(CameraParameters::KEY_MIN_EXPOSURE_COMPENSATION, "0");
params.set(CameraParameters::KEY_EXPOSURE_COMPENSATION_STEP, "0.000001f");
}
/*rotation setting*/
params.set(CameraParameters::KEY_ROTATION, "0");
/*[email protected] :add some settings to pass cts*/
/*focus distance setting ,no much meaning ,only for passing cts */
parameterString = "0.3,50,Infinity";
params.set(CameraParameters::KEY_FOCUS_DISTANCES, parameterString.string());
/*focus length setting ,no much meaning ,only for passing cts */
parameterString = "35";
params.set(CameraParameters::KEY_FOCAL_LENGTH, parameterString.string());
/*horizontal angle of view setting ,no much meaning ,only for passing cts */
parameterString = "100";
params.set(CameraParameters::KEY_HORIZONTAL_VIEW_ANGLE, parameterString.string());
/*vertical angle of view setting ,no much meaning ,only for passing cts */
parameterString = "100";
params.set(CameraParameters::KEY_VERTICAL_VIEW_ANGLE, parameterString.string());
/*quality of the EXIF thumbnail in Jpeg picture setting */
parameterString = "50";
params.set(CameraParameters::KEY_JPEG_THUMBNAIL_QUALITY, parameterString.string());
/*supported size of the EXIF thumbnail in Jpeg picture setting */
parameterString = "0x0,160x128";
params.set(CameraParameters::KEY_SUPPORTED_JPEG_THUMBNAIL_SIZES, parameterString.string());
parameterString = "160";
params.set(CameraParameters::KEY_JPEG_THUMBNAIL_WIDTH, parameterString.string());
parameterString = "128";
params.set(CameraParameters::KEY_JPEG_THUMBNAIL_HEIGHT, parameterString.string());
/* [email protected]: for cts ,KEY_MAX_NUM_DETECTED_FACES_HW should not be 0 */
params.set(CameraParameters::KEY_MAX_NUM_DETECTED_FACES_HW, "0");
params.set(CameraParameters::KEY_MAX_NUM_DETECTED_FACES_SW, "0");
params.set(CameraParameters::KEY_RECORDING_HINT,"false");
params.set(CameraParameters::KEY_VIDEO_STABILIZATION_SUPPORTED,"false");
params.set(CameraParameters::KEY_VIDEO_SNAPSHOT_SUPPORTED,"true");
params.set(CameraParameters::KEY_MAX_NUM_METERING_AREAS,"0");
LOGD ("Support Preview format: %s ",params.get(CameraParameters::KEY_SUPPORTED_PREVIEW_FORMATS));
LOGD ("Support Preview sizes: %s ",params.get(CameraParameters::KEY_SUPPORTED_PREVIEW_SIZES));
LOGD ("Support Preview FPS range: %s",params.get(CameraParameters::KEY_SUPPORTED_PREVIEW_FPS_RANGE));
LOGD ("Support Preview framerate: %s",params.get(CameraParameters::KEY_SUPPORTED_PREVIEW_FRAME_RATES));
LOGD ("Support Picture sizes: %s ",params.get(CameraParameters::KEY_SUPPORTED_PICTURE_SIZES));
if (params.get(CameraParameters::KEY_SUPPORTED_WHITE_BALANCE))
LOGD ("Support white balance: %s",params.get(CameraParameters::KEY_SUPPORTED_WHITE_BALANCE));
if (params.get(CameraParameters::KEY_SUPPORTED_EFFECTS))
LOGD ("Support color effect: %s",params.get(CameraParameters::KEY_SUPPORTED_EFFECTS));
if (params.get(CameraParameters::KEY_SUPPORTED_SCENE_MODES))
LOGD ("Support scene: %s",params.get(CameraParameters::KEY_SUPPORTED_SCENE_MODES));
if (params.get(CameraParameters::KEY_SUPPORTED_FLASH_MODES))
LOGD ("Support flash: %s",params.get(CameraParameters::KEY_SUPPORTED_FLASH_MODES));
LOGD ("Support focus: %s",params.get(CameraParameters::KEY_SUPPORTED_FOCUS_MODES));
LOGD ("Support zoom: %s(ratios: %s)",params.get(CameraParameters::KEY_ZOOM_SUPPORTED),
params.get(CameraParameters::KEY_ZOOM_RATIOS));
if (strcmp("0", params.get(CameraParameters::KEY_MAX_EXPOSURE_COMPENSATION))
|| strcmp("0", params.get(CameraParameters::KEY_MIN_EXPOSURE_COMPENSATION))) {
LOGD ("Support exposure: (%s -> %s)",params.get(CameraParameters::KEY_MIN_EXPOSURE_COMPENSATION),
params.get(CameraParameters::KEY_MAX_EXPOSURE_COMPENSATION));
}
LOGD ("Support hardware faces detecte: %s",params.get(CameraParameters::KEY_MAX_NUM_DETECTED_FACES_HW));
LOGD ("Support software faces detecte: %s",params.get(CameraParameters::KEY_MAX_NUM_DETECTED_FACES_SW));
LOGD ("Support video stabilization: %s",params.get(CameraParameters::KEY_VIDEO_STABILIZATION_SUPPORTED));
LOGD ("Support recording hint: %s",params.get(CameraParameters::KEY_RECORDING_HINT));
LOGD ("Support video snapshot: %s",params.get(CameraParameters::KEY_VIDEO_SNAPSHOT_SUPPORTED));
LOGD ("Support Mirror and Filp: %s",(mDriverMirrorSupport && mDriverFlipSupport)? "true":"false");
cameraConfig(params);
LOG_FUNCTION_NAME_EXIT
}然后剩下的大部分都是针对这个线程的运行实现以及对于CameraHal_Module.cpp中实现的为上层提供的接口的具体实现,比如:
int CameraHal::startPreview()
{
LOG_FUNCTION_NAME
Message msg;
Mutex::Autolock lock(mLock);
if ((mPreviewThread != NULL) && (mCommandThread != NULL)) {
msg.command = CMD_PREVIEW_START;
msg.arg1 = (void*)CMDARG_NACK;
commandThreadCommandQ.put(&msg);
}
mPreviewCmdReceived = true;
LOG_FUNCTION_NAME_EXIT
return NO_ERROR ;
}
void CameraHal::stopPreview()
{
LOG_FUNCTION_NAME
Message msg;
int ret = 0;
Mutex::Autolock lock(mLock);
if ((mPreviewThread != NULL) && (mCommandThread != NULL)) {
msg.command = CMD_PREVIEW_STOP;
msg.arg1 = (void*)CMDARG_ACK;
commandThreadCommandQ.put(&msg);
if (mANativeWindow == NULL) {
mANativeWindowCond.signal();
LOGD("%s(%d): wake up command thread for stop preview",__FUNCTION__,__LINE__);
}
while (ret == 0) {
ret = commandThreadAckQ.get(&msg);
if (ret == 0) {
if (msg.command == CMD_PREVIEW_STOP) {
ret = 1;
}
}
}
} else {
LOGE("%s(%d): cancel, because thread (%s %s) is NULL", __FUNCTION__,__LINE__,(mPreviewThread == NULL)?"mPreviewThread":" ",
(mCommandThread == NULL)?"mCommandThread":" ");
}
mPreviewCmdReceived = false;
LOG_FUNCTION_NAME_EXIT
}
int CameraHal::autoFocus()
{
LOG_FUNCTION_NAME
int ret = 0;
Message msg;
Mutex::Autolock lock(mLock);
if ((mPreviewThread != NULL) && (mCommandThread != NULL)) {
msg.command = CMD_AF_START;
msg.arg1 = (void*)CMDARG_ACK;
commandThreadCommandQ.put(&msg);
while (ret == 0) {
ret = commandThreadAckQ.get(&msg,5000);
if (ret == 0) {
if (msg.command == CMD_AF_START) {
ret = 1;
}
} else {
LOGE("%s(%d): AutoFocus is time out!!!\n",__FUNCTION__,__LINE__);
}
}
} else {
LOGE("%s(%d): cancel, because thread (%s %s) is NULL", __FUNCTION__,__LINE__,(mPreviewThread == NULL)?"mPreviewThread":" ",
(mCommandThread == NULL)?"mCommandThread":" ");
}
LOG_FUNCTION_NAME_EXIT
return NO_ERROR;
}