Android手机控制树莓派制作的四驱小车
原文:http://blog.csdn.net/maninbehind/article/details/9715137
年初的时候看到@段念-段文韬 的这篇文章《使用树莓派制作的远程开门器》后,觉得硬件编程似乎没有想象的难。 之前认为硬件编程可能需要学习新的编程语言,需要特别的编程环境。然而树莓派使用Linux操作系统环境,只要Linux支持的编程语言 ,都可以成为你的选择。当语言环境不是问题的时候,对于我来说,我最感兴趣的部分是如何用树莓派来控制一些低速的外部设备,例如 :继电器、小马达。 一般的PC并不提供这些通用接口,PC只提供一些高速设备的接口如USB。 而树莓派不止提供了USB接口,还提供了GPIO接口,有了这个接口使得控制通用的外部设备得以实现。
开始之前,请用最方便的方式连入树莓派。我自己没有额外的显示器,所以只好通过MBA的Terminal直接SSH上去。 树莓派预装了Python,但是你需要安装RPI GPIO python来驱动GPIO。安装包地址:http://log.liminastudio.com/writing/tutorials/tutorial-how-to-use-your-raspberry-pi-like-an-arduino 。安装之后,在程序中import就可以控制GPIO:
- import RPi.GPIO as GPIO
- GPIO.setup(7, GPIO.OUT)
- GPIO.output(7, True)
- GPIO.output(7,False)
代码中树莓派通过指定GPIO接口向外部发送信号,如果从外部向树莓派输入信号,则指定GPIO.input。整个小车需要的部件就是四个轮子,可以单独控制,所以下面我们只说说如何来控制其中的一个电机。
第一部分: 电机控制电路
接通VCC,GND 模块电源指示灯亮
IA1输入高电平,IA1输入低电平,【OA1 OB1】电机正转;
IA1输入低电平,IA1输入高电平,【OA1 OB1】电机反转;
IA2输入高电平,IA2输入低电平,【OA2 OB2】电机正转;
IA2输入低电平,IA2输入高电平,【OA2 OB2】电机反转;
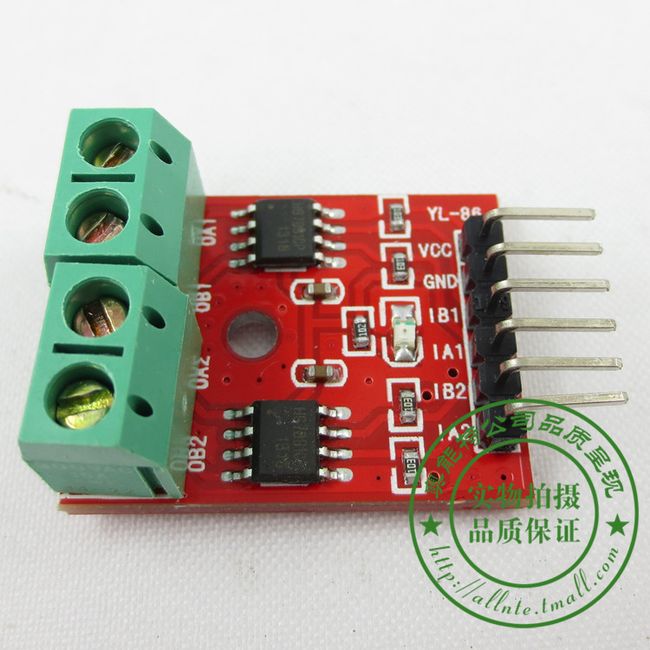
为了简化电路设计,考虑用驱动模块控制。这是我在淘宝购买的两路电机驱动 H桥 L9110 电机驱动模块 ,接上它,你只需要下面简单的连接,就可以让树莓派来控制电机了。驱动模块有电源、信号输入接口以及电源输出接口:
- 电源输入,VCC,GND分别是输入电源的正负极,可以用电池组来供电。 注意不能接反,否则驱动模块可能短时间内发烫,甚至烧坏。
- 信号输入,IA1 IB1, IA2 IB2分别是两对信号输入接口,接受来自树莓派信号的控制驱动模块的电源输出,达到电机正转反正的目的。
- 电源输出,电源输出接口OA1 OB1,OA2 OB2 (绿色部分)分别是两对输出电流到电机的接口,通过他们为电机供电。
- 当你连接好这些接口后,模块上的连接也就全部完成了,接下来就要把模块上的IA1 IB1, IA2 IB2连接到树莓派程序指定的GPIO。

BOARD模式下的接口定义
第二部分:连接GPIO
要使用树莓派为GPIO提供连个设置模式,BOARD和BCM, 模式的不同GPIO的每一个接口的定义也不同(上图是BOARD模式下的定义),使用时必须在代码中必须明确指定他的模式:
- import RPi.GPIO as GPIO #GPIO package
- GPIO.setmode(GPIO.BOARD) #设置模式
- GPIO.setup(13, GPIO.OUT) #指定接口是输出还是输入
- GPIO.setup(15, GPIO.OUT) #指定接口是输出还是输入
- GPIO.output(13, GPIO.HIGH) #输出高电平
- GPIO.output(15, GPIO.LOW) #输出低电平
当然,为代码更好读,可以专门写一个Wheel类来控制轮子。单个轮子只有三个操作, 前进、后退、停止,现在来封装这些操作:
第三部分:封装轮子
- class Wheel:
- pins ={'a':[13,15],'b':[16,18],'c':[19,21],'d':[22,24]}# 这里指定了四个轮子所使用的8个GPIO接口
- def __init__(self,name):
- self.name = name
- self.pin = Wheel.pins[self.name]
- GPIO.setmode(GPIO.BOARD)
- GPIO.setup(self.pin[0],GPIO.OUT)
- GPIO.setup(self.pin[1],GPIO.OUT)
- self.stop()
- def forward(self):
- GPIO.output(self.pin[0],GPIO.HIGH)
- GPIO.output(self.pin[1],GPIO.LOW)
- def stop(self):
- GPIO.output(self.pin[0],False)
- GPIO.output(self.pin[1],False)
- def back(self):
- GPIO.output(self.pin[0],False)
- GPIO.output(self.pin[1],True)
- Wheel('a').forward() #a,b,c,d是四个轮子的名字
通过调用每个Wheel实例,可以对他们自由操作。由于整个车是由四个轮子协同来工作的,我们需要同时来让四个轮子一起工作,对此对这种协同工作进行封装,让我们不必在关心怎样驱动4个轮子就可以前进了:
第四部分: 封装车子
我们希望车子能够前进、后退、左转、右转,于是可以这样来封装一下代码:
- class Car:
- wheels=[Wheel('a'),Wheel('b'),Wheel('c'),Wheel('d')]
- @staticmethod
- def init():
- GPIO.setmode(GPIO.BOARD)
- @staticmethod
- def forward():
- for wheel in Car.wheels:
- wheel.forward()
- @staticmethod
- def back():
- for wheel in Car.wheels:
- wheel.back()
- @staticmethod
- def left():
- Car.wheels[0].forward()
- Car.wheels[1].forward()
- Car.wheels[3].back()
- Car.wheels[2].back()
- @staticmethod
- def right():
- Car.wheels[2].forward()
- Car.wheels[3].forward()
- Car.wheels[0].back()
- Car.wheels[1].back()
- @staticmethod
- def stop():
- Car.wheel[0].stop()
- Car.wheel[1].stop()
- Car.wheel[3].stop()
- Car.wheel[2].stop()
Car是一个静态类,它提供的五个方式分别对应到小车的前、后、左、右、停。现在我们考虑远程遥控小车,因此小车必须提供和外部遥控设备的通信接口:
第五部分:通信程序
小车和外界的通信方式其实很多,红外、蓝牙、Wifi等等。根据我的设备清单我就选择了Wifi的方式,所以使用socket作为接口最直接不过了:
- rom socket import *
- import sys
- import time
- import car
- commands ={'forward':Car.forward,
- 'back':Car.back,
- 'stop':Car.stop,
- 'left':Car.left,
- 'right':Car.right
- }
- def execute(command):
- print command
- commands[command]()
- HOST ='192.168.2.101' #the ip of rapberry pi
- PORT = 8888
- s= socket(AF_INET, SOCK_STREAM)
- s.bind((HOST, PORT))
- s.listen(1)
- print ('listening on 8888')
- while 1:
- conn, addr = s.accept()
- print ('Connected by:', addr)
- while 1:
- command= conn.recv(1024).replace('\n','')
- if not command:break
- execute(command)
- conn.close()
> sudo python server.py 之后,树莓派会监听8888端口一旦有消息传递过来,根据命令参数调用相应的方法。小车的服务端接口就相当一个执行者,接受到命令就立刻执行,此次只要可以建立和小车的socket连接,便可以轻松控制,我们打算用Android手机来发送这个消息:
第六部分: Android手机操作小车
通过手机来操作,实际上就通过socket和树莓派进行通信,当树莓派处于listening状态,对于手机来说,它要做的最重要的事情就是发送消息到树莓派,一个小车的指挥者:
- package com.simplexk;
- import java.io.PrintWriter;
- import java.net.Socket;
- public class Commander {
- public static String HOST ="192.168.2.101"; //the ip of raspberry pi
- public static int PORT =8888;
- public static void send(Command forward) throws Exception {
- Socket socket = new Socket(HOST, PORT);
- PrintWriter writer = new PrintWriter(socket.getOutputStream());
- writer.println(forward.toString());
- writer.flush();
- socket.close();
- }
- }
当然这仅仅是手机向树莓派发送消息的部分,手机发送什么的命令,你还需要编程额外的用户接口程序来完成。最简单的,你可以放上四个按钮来操作小车的四个运动方向。
---------------结束---------------