Linux驱动修炼之道-SPI驱动框架源码分析(上)
SPI驱动架构,以前用过,不过没这个详细,跟各位一起分享:
来自:http://blog.csdn.net/woshixingaaa/article/details/6574215
SPI协议是一种同步的串行数据连接标准,由摩托罗拉公司命名,可工作于全双工模式。相关通讯设备可工作于m/s模式。主设备发起数据帧,允许多个从设备的存在。每个从设备
有独立的片选信号,SPI一般来说是四线串行总线结构。
接口:
SCLK——Serial Clock(output from master)时钟(主设备发出)
MOSI/SIMO——Master Output, Slave Input(output from master)数据信号线mosi(主设备发出)
MISO/SOMI——Master Input,Slave Outpu(output from slave)数据信号线(从设备)
SS——Slave Select(active low;output from master)片选信号
下面来看一下Linux中的SPI驱动。在Linux设备驱动框架的设计中,有一个重要的主机,外设驱动框架分离的思想,如下图。
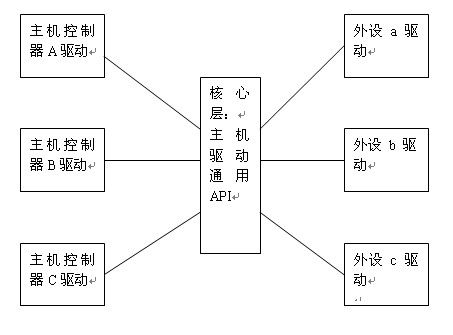
外设a,b,c的驱动与主机控制器A,B,C的驱动不相关,主机控制器驱动不关心外设,而外设驱动也不关心主机,外设只是访问核心层的通用的API进行数据的传输,主机和外设之间可以进行任意的组合。如果我们不进行如图的主机和外设分离,外设a,b,c和主机A,B,C进行组合的时候,需要9种不同的驱动。设想一共有个主机控制器,n个外设,分离的结构是需要m+n个驱动,不分离则需要m*n个驱动。
下面介绍spi子系统的数据结构:
在Linux中,使用spi_master结构来描述一个SPI主机控制器的驱动。
- <span style="font-size:18px;">struct spi_master {
- struct device dev;/*总线编号,从0开始*/
- s16 bus_num;/*支持的片选的数量,从设备的片选号不能大于这个数量*/
- u16 num_chipselect;
- u16 dma_alignment;/*改变spi_device的特性如:传输模式,字长,时钟频率*/
- int (*setup)(struct spi_device *spi);/*添加消息到队列的方法,这个函数不可睡眠,他的任务是安排发生的传送并且调用注册的回调函数complete()*/
- int (*transfer)(struct spi_device *spi,struct spi_message *mesg);
- void (*cleanup)(struct spi_device *spi);
- };</span>
分配,注册和注销的SPI主机的API由SPI核心提供:
- struct spi_master *spi_alloc_master(struct device *host, unsigned size);
- int spi_register_master(struct spi_master *master);
- void spi_unregister_master(struct spi_master *master);
- struct spi_driver {
- int (*probe)(struct spi_device *spi);
- int (*remove)(struct spi_device *spi);
- void (*shutdown)(struct spi_device *spi);
- int (*suspend)(struct spi_device *spi, pm_message_t mesg);
- int (*resume)(struct spi_device *spi);
- struct device_driver driver;
- };
可以看出,spi_driver结构体和platform_driver结构体有极大的相似性,都有probe(),remove(),suspend(),resume()这样的接口。
Linux用spi_device来描述一个SPI外设设备。
- struct spi_device {
- struct device dev;
- struct spi_master *master; //对应的控制器指针u32
- max_speed_hz; //spi通信的时钟u8
- chip_select; //片选,用于区分同一总线上的不同设备
- u8 mode;
- #define SPI_CPHA 0x01 /* clock phase */
- #define SPI_CPOL 0x02 /* clock polarity */
- #define SPI_MODE_0 (0|0) /* (original MicroWire) */#define SPI_MODE_1 (0|SPI_CPHA)
- #define SPI_MODE_2 (SPI_CPOL|0)
- #define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)#define SPI_CS_HIGH 0x04 /* chipselect active high? */
- #define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
- #define SPI_3WIRE 0x10 /* SI/SO signals shared */
- #define SPI_LOOP 0x20 /* loopback mode */
- u8 bits_per_word; //每个字长的比特数
- int irq; //使用的中断
- void *controller_state;
- void *controller_data;
- char modalias[32]; //名字
- };
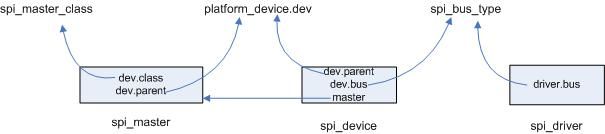
这里的spi_master_class,spi_bus_type又是什么呢,看下边两个结构体:
- struct bus_type spi_bus_type = {
- .name = "spi",
- .dev_attrs = spi_dev_attrs,
- .match = spi_match_device,
- .uevent = spi_uevent,
- .suspend = spi_suspend,
- .resume = spi_resume,
- };
- static struct class spi_master_class = {
- .name = "spi_master",
- .owner = THIS_MODULE,
- .dev_release = spi_master_release,
- };
- static struct class *spidev_class;
下边来看两个板级的结构,其中spi_board_info用来初始化spi_device,s3c2410_spi_info用来初始化spi_master。这两个板级的结构需要在移植的时候在arch/arm/mach-s3c2440/mach-smdk2440.c中初始化。
- struct spi_board_info {
- char modalias[32]; //设备与驱动匹配的唯一标识
- const void *platform_data;
- void *controller_data;
- int irq;
- u32 max_speed_hz;
- u16 bus_num; //设备所归属的总线编号
- u16 chip_select;
- u8 mode;
- };
- struct s3c2410_spi_info {
- int pin_cs; //芯片选择管脚
- unsigned int num_cs; //总线上的设备数
- int bus_num; //总线号
- void (*gpio_setup)(struct s3c2410_spi_info *spi, int enable); //spi管脚配置函数
- void (*set_cs)(struct s3c2410_spi_info *spi, int cs, int pol);
- };
- struct boardinfo {
- /*用于挂到链表头board_list上*/
- struct list_head list;
- /*管理的spi_board_info的数量*/
- unsigned n_board_info;
- /*存放结构体spi_board_info*/
- struct spi_board_info board_info[0];
- };
- struct s3c24xx_spi {
- /* bitbang has to be first */
- struct spi_bitbang bitbang;
- struct completion done;
- void __iomem *regs;
- int irq;
- int len;
- int count;
- void (*set_cs)(struct s3c2410_spi_info *spi, int cs, int pol);
- /* data buffers */const unsigned char *tx;
- unsigned char *rx;
- struct clk *clk;
- struct resource *ioarea;
- struct spi_master *master;
- struct spi_device *curdev;
- struct device *dev;
- struct s3c2410_spi_info *pdata;
- };
- <span style="font-size:18px;">struct spi_bitbang {
- struct workqueue_struct *workqueue; //工作队列头
- struct work_struct work; //每一次传输都传递下来一个spi_message,都向工作队列头添加一个
- workspinlock_t lock;
- struct list_head queue; //挂接spi_message,如果上一次的spi_message还没有处理完,接下来的spi_message就挂接在queue上等待处理
- u8 busy; //忙碌标志
- u8 use_dma;
- u8 flags;
- struct spi_master *master;/*一下3个函数都是在函数s3c24xx_spi_probe()中被初始化*/
- int (*setup_transfer)(struct spi_device *spi,struct spi_transfer *t); //设置传输模式
- void (*chipselect)(struct spi_device *spi, int is_on); //片选
- #define BITBANG_CS_ACTIVE 1 /* normally nCS, active low */
- #define BITBANG_CS_INACTIVE 0/*传输函数,由s3c24xx_spi_txrx来实现*/
- int (*txrx_bufs)(struct spi_device *spi, struct spi_transfer *t);
- u32 (*txrx_word[4])(struct spi_device *spi,unsigned nsecs,u32 word, u8 bits);
- };</span>
- struct spi_message {
- struct list_head transfers; //此次消息的传输队列,一个消息可以包含多个传输段
- struct spi_device *spi; //传输的目的设备
- unsigned is_dma_mapped:1; //如果为真,此次调用提供dma和cpu虚拟地址
- void (*complete)(void *context); //异步调用完成后的回调函数
- void *context; //回调函数的参数
- unsigned actual_length; //此次传输的实际长度
- int status; //执行的结果,成功被置0,否则是一个负的错误码
- struct list_head queue;
- void *state;
- };
下面看一看spi_transfer:
- struct spi_transfer {
- const void *tx_buf; //要写入设备的数据(必须是dma_safe),或者为NULL
- void *rx_buf; //要读取的数据缓冲(必须是dma_safe),或者为NULL
- unsigned len; //tx和rx的大小(字节数),这里不是指它的和,而是各自的长度,他们总是相等的
- dma_addr_t tx_dma; //如果spi_message.is_dma_mapped是真,这个是tx的dma地址
- dma_addr_t rx_dma; //如果spi_message.is_dma_mapped是真,这个是rx的dma地址
- unsigned cs_change:1; //影响此次传输之后的片选,指示本次tranfer结束之后是否要重新片选并调用setup改变设置,这个标志可以较少系统开销u8
- bits_per_word; //每个字长的比特数,如果是0,使用默认值
- u16 delay_usecs; //此次传输结束和片选改变之间的延时,之后就会启动另一个传输或者结束整个消息
- u32 speed_hz; //通信时钟。如果是0,使用默认值
- struct list_head transfer_list; //用来连接的双向链表节点
- };