ARM基础:系统调用与软件中断SWI的实现
/******************************************************************************************************************
原文地址:http://blog.csdn.net/mr_raptor/article/details/6556451
说明:SWI。
******************************************************************************************************************/
1 系统调用
操作系统的主要功能是为应用程序的运行创建良好的环境,保障每个程序都可以最大化利用硬件资源,防止非法程序破坏其它应用程序执行环境,为了达到这个目的,操作系统会将硬件的操作权限交给内核来管理,用户程序不能随意使用硬件,使用硬件(对硬件寄存器进行读写)时要先向操作系统发出请求,操作系统内核帮助用户程序实现其操作,也就是说用户程序不会直接操作硬件,而是提供给用户程序一些具备预定功能的内核函数,通过一组称为系统调用的(system call)的接口呈现给用户,系统调用把应用程序的请求传给内核,调用相应的内核函数完成所需的处理,将处理结果返回给应用程序。这好比我们去银行取款,用户自己的银行帐户不可能随意操作,必须要有一个安全的操作流程和规范,银行里的布局通常被分成两部分,中间用透明玻璃分隔开,只留一个小窗口,面向用户的是用户服务区,工作人员所在区域为内部业务操作区,取款时,将银行卡或存折通过小窗口交给业务员,并且告诉他要取多少钱,具体取钱的操作你是不会直接接触的,业务员会将银行帐户里减掉取款金额,将现金给你。上述操作流程可以很好保护银行系统,银行系统的操作全部由业务员来实现,用户只能向业务员提出自己的服务请求。银行里的小窗口就类似与操作系统的系统调用接口,是将用户请求传递给内核的接口。
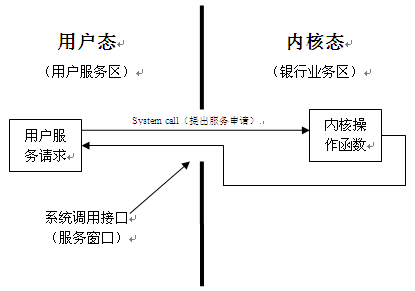
图3-16系统调用接口示意图
操作系统里将用户程序运行在用户模式下,并且为其分配可以使用内存空间,其它内存空间不能访问,内核态运行在特权模式下,对系统所有硬件进行统一管理和控制。从前面所学知识可以了解到,用户模式下没有权限进行模式切换,这也就意味着用户程序不可能直接通过切换模式去访问硬件寄存器,如果用户程序试图访问没有权限的硬件,会产生异常。这样用户程序被限制起来,如果用户程序想要使用硬件时怎么办呢?用户程序使用硬件时,必须调用操作系统提供的API接口才可以,而操作系统API接口通过软件中断方式切换到管理模式下,实现从用户模式下进入特权模式。
2 软件中断
软中断是利用硬件中断的概念,用软件方式进行模拟,实现从用户模式切换到特权模式并执行特权程序的机制。
硬件中断是由电平的物理特性决定,在电平变化时引发中断操作,而软中断是通过一条具体指令SWI,引发中断操作,也就是说用户程序里可以通过写入SWI指令来切换到特权模式,当CPU执行到SWI指令时会从用户模式切换到管理模式下,执行软件中断处理。由于SWI指令由操作系统提供的API封装起来,并且软件中断处理程序也是操作系统编写者提前写好的,因此用户程序调用API时就是将操作权限交给了操作系统,所以用户程序还是不能随意访问硬件。
先来了解下SWI指令。
SWI 软中断号immed_24
软中断指令相对比较简单,只有一个操作数:immed_24,SWI指令编码格式如图3-17所示。

图3-17 SWI指令编码格式
SWI指令编码中immed_24为24位任意有效立即数(范围0~2^24-1),当该指令被执行时系统产生软中断异常,切换到管理模式下。用户程序切换到管理模式下后,进入到软中断处理程序,通常软中断异常处理程序都是系统开发人员提前写好的,SWI切换到了特权模式,执行的是系统开发人员写好的异常处理程序,只要该处理程序没有问题,那么用户程序还是不能为所欲为的。
SWI指令后面的24立即数是干什么用的呢?用户程序通过SWI指令切换到特权模式,进入软中断处理程序,但是软中断处理程序不知道用户程序到底想要做什么?SWI指令后面的24位用来做用户程序和软中断处理程序之间的接头暗号。通过该软中断立即数来区分用户不同操作,执行不同内核函数。如果用户程序调用系统调用时传递参数,根据ATPCSC语言与汇编混合编程规则将参数放入R0~R4即可。下面的例子通过系统调用函数int led_on(int led_no)实现点亮第led_no 个LED灯,由于C语言里没有SWI 指令对应的语句,因此这儿要用到C语言与汇编混合编程,led_on函数里将参数led_no的值传递给R0,通过软中断SWI指令切换到软中断管理模式,同时R0 软中断方式点亮LED灯,用户通过SWI #1指令可以点灯,具体点亮哪个灯,通过R0保存参数传递,如果亮灯成功返回对应LED号。
系统调用接口函数led_on:
#define __led_on_swi_no 1 // 软中断号1,调用管理模式下的do_led_on函数
int led_on(int led_no){
int ret; // 返回值
__asm{ // 由于C程序中没有SWI对应表达式,所以使用混合编程
mov r0, led_no // 根据ATPCS规则,r0存放第一个参数
swi __led_on_swi_no // 产生SWI软中断,中断号为__led_on_swi_no
mov ret, r0 // 软中断处理结束,取得中断处理返回值,传递给ret变量
}
return ret; // 将ret返回给调用led_on的语句
}
3 软中断处理
CPU执行到swi xxx执行后,产生软件中断,由异常处理部分知识可知,软中断产生后CPU将强制将PC的值置为异常向量表地址0x08,在异常向量表0x08处安放跳转指令b HandleSWI,这样CPU就跳往我们自己定义的HandleSWI处执行。
首先,软中断处理中通过STMFD SP!, {R0-R12, LR} 要保存程序执行现场,将R0~R12通用寄存器数据保存在管理模式下SP栈内,LR由硬件自动保存软中断指令下一条指令的地址(后面利用LR的地址取得SWI指令编码),该寄存器值也保存在SP栈内,将来处理完毕之后返回。由SWI指令编码知识可知, SWI指令低24位保存有软中断号,通过LDR R4, [LR, #-4]指令,取得SWI指令编码(LR为硬件自动保存SWI xxx指令的下一条指令地址,LR – 4就是SWI指令地址),将其保存在R4寄存器中。通过BIC R4, R4, #0xFF000000指令将SWI指令高8位清除掉,只保留低24位立即数,再根据24位立即数中的软中断号判断用户程序的请求操作。如果24位立即数为1,表示led_on系统调用产生的软中断,则在管理模式下调用对应的亮灯操作do_led_on。如果24位立即数为2,表示led_off系统调用产生的软中断,则调用灭灯操作do_led_on,根据ATPCS调用规则,R0~R3做为参数传递寄存器,在软中断处理中没有使用这4个寄存器,而是使用R4作为操作寄存器的。执行完系统调用操作之后,返回到swi_return(在调用对应系统操作时,通过LDREQ LR, =swi_return设置了返回地址),执行返回处理,通过LDMIA SP!, {R0-R12, PC}^ 指令将用户寄存器数据恢复到R0~R12,将进入软中断处理时保存的返回地址LR的值恢复给PC,实现程序返回,同时还恢复了状态寄存器。切换回用户模式下程序中继续执行。
; 异常向量表开始
; 0x00: 复位Reset异常
b Reset
; 0x04: 未定义异常(未处理)
HandleUndef
b HandleUndef
; 0x08: 软件中断异常,跳往软件中断处理函数HandleSWI
b HandleSWI
… …
; 省略其它异常向量和对应处理
… …
;***********************************************************************
; 软中断处理
;***********************************************************************
IMPORT do_led_on
IMPORT do_led_off
HandleSWI
STMFD SP!, {R0-R12, LR} ; 保存程序执行现场
LDR R4, [LR, #-4] ; LR - 4 为指令" swi xxx" 的地址,低24位是软件中断号
BIC R4, R4, #0xFF000000 ; 取得ARM指令24位立即数
CMP R4, #1 ; 判断24位立即数,如果为1,调用do_led_on系统调用
LDREQ LR, =swi_return ; 软中断处理返回地址
LDREQ PC, = do_led_on ; 软中断号1对应系统调用处理
CMP R4, #2 ; 判断24位立即数,如果为2,调用do_led_off系统调用
LDREQ LR, =swi_return ; 软中断处理返回地址
LDREQ PC, = do_led_off ; 软中断号2对应系统调用处理
MOVNE R0, #-1 ; 没有该软中断号对应函数,出错返回-1
swi_return
LDMIA SP!, {R0-R12, PC}^ ; 中断返回, ^表示将spsr的值复制到cpsr
1.1.4 led系统调用实验
本实验通过Led跑马灯效果来模拟系统调用,本程序提供了两个系统调用接口led_on和led_off,用户程序main.c通过引入头文件led.h使用系统调用接口,用户调用led_on和led_off时通过软中断指令切换到管理模式,在管理模式下调用内核led操作系统do_led_on和do_led_off,实现Led的亮灭。实验源码适用于QQ2440,TQ2440,MINI2440开发板。
head.s:
本程序文件主要用于安装异常向量表,Reset异常处理,软中断处理和必要硬件初始化。
;**********************************************************************
; 系统调用实验(QQ2440, MINI2440,TQ2440)
;**********************************************************************
GPBCON EQU 0x56000010
GPBDAT EQU 0x56000014
SYS_STACK_BASE EQU 0x33000000
EXPORT SWI_LED
AREA SWI_LED ,CODE,READONLY
ENTRY
;**********************************************************************
; 设置中断向量,除Reset和HandleSWI外,其它异常都没有使用(如果不幸发生了,
; 将导致死机)
;**********************************************************************
; 0x00: 复位Reset异常
b Reset
; 0x04: 未定义异常(未处理)
HandleUndef
b HandleUndef
; 0x08: 软件中断异常,跳往软件中断处理函数HandleSWI
b HandleSWI
; 0x0c: 指令预取异常(未处理)
HandlePrefetchAbt
b HandlePrefetchAbt
; 0x10: 数据访问中止异常(未处理)
HandleDataAbt
b HandleDataAbt
; 0x14: 未使用异常(未处理)
HandleNotUsed
b HandleNotUsed
; 0x18: 一般中断异常(未处理)
HandleIRQ
b HandleIRQ
; 0x1c: 快速中断异常(未处理)
HandleFIQ
b HandleFIQ
Reset ; 复位异常处理入口
; 关闭看门狗
ldr r0, = 0x53000000
mov r1, #0
str r1, [r0]
bl initmem
ldr sp, =0x32000000 ; 设置管理模式栈指针
; LED灯初始化
ldr r0, =GPBCON ; LED的GPIO接口配置寄存器
ldr r1, =0x00015400 ; GPIO配置数据
str r1, [r0] ; 设置GPIO
ldr r0, =GPBDAT ; Led数据寄存器
ldr r1, =0x1e0 ; 熄灭所有Led
str r1, [r0]
msr cpsr_c, #0xdf
ldr sp, =SYS_STACK_BASE
msr cpsr_c, #0x50 ; 开启系统中断,进入用户模式,该指令执行完
; 就进入用户空间,执行用户程序xmain
ldr lr, =halt_loop ; 设置管理模式下返回地址
IMPORT xmain
ldr pc, =xmain ; 跳入主函数main里执行
halt_loop
b halt_loop
;***********************************************************************
; 软中断处理
;***********************************************************************
IMPORT do_led_on
IMPORT do_led_off
HandleSWI
STMFD SP!, {R0-R12, LR} ; 保存程序执行现场
LDR R4, [LR, #-4] ; LR - 4 为指令" swi xxx" 的地址,指令低24位软件中断号
BIC R4, R4, #0xFF000000 ; 取得ARM指令24位立即数
CMP R4, #1 ; 判断24位立即数的值,如果为1,调用do_led_on系统调用
LDREQ LR, =swi_return ; 软中断处理返回地址
LDREQ PC, = do_led_on ; 软中断号1对应系统调用处理
CMP R4, #2 ; 判断24位立即数的值,如果为2,调用do_led_off系统调用
LDREQ LR, =swi_return ; 软中断处理返回地址
LDREQ PC, = do_led_off ; 软中断号2对应系统调用处理
MOVNE R0, #-1 ; 没有该软中断号对应函数,出错返回-1
swi_return
LDMIA SP!, {R0-R12, PC}^ ; 中断返回, ^表示将spsr的值复制到cpsr
initmem
ldr r0, =0x48000000 ; 内存控制寄存器起始地址
ldr r1, =0x48000034 ; 内存控制寄存器结束地址
adr r2, memdata ; 加载寄存器设置数据区首地址
initmemloop
ldr r3, [r2], #4
str r3, [r0], #4
teq r0, r1
bne initmemloop ; 循环设置每一个寄存器
mov pc, lr
memdata
DCD 0x22000000 ;BWSCON
DCD 0x00000700 ;BANKCON0
DCD 0x00000700 ;BANKCON1
DCD 0x00000700 ;BANKCON2
DCD 0x00000700 ;BANKCON3
DCD 0x00000700 ;BANKCON4
DCD 0x00000700 ;BANKCON5
DCD 0x00018005 ;BANKCON6
DCD 0x00018005 ;BANKCON7
DCD 0x008e07a3 ;REFRESH
DCD 0x000000b1 ;BANKSIZE
DCD 0x00000030 ;MRSRB6
DCD 0x00000030 ;MRSRB7
END ; 代码结束
main.c:
本程序文件是用户程序xmain,主要实现跑马灯效果,通过使用系统调用led_on,led_off实现Led控制。
#include "led.h"
/* 亮灯延时 */
void delay(int msec)
{
int i, j;
for(i = 1000; i > 0; i--)
for(j = msec*10; j > 0; j--)
/* do nothing */;
}
/* 主函数跑马灯效果 */
int xmain()
{
while(1)
{
led_on(1);
delay(5); //delay
led_on(2);
delay(5); //delay
led_on(3);
delay(5); //delay
led_on(4);
delay(5); //delay
led_off(1);
delay(5); //delay
led_off(2);
delay(5); //delay
led_off(3);
delay(5); //delay
led_off(4);
delay(5); //delay
}
return 0;
}
led_lib.c
本程序文件是系统调用函数led_on, led_off的具体实现,通过swi软中断提交硬件访问请求,将具体请求以软中断号的方式通过参数传递给内核空间。
#include "led.h"
#define __led_on_swi_no 1 // 软中断号1,调用管理模式下的do_led_on函数
#define __led_off_swi_no 2 // 软中断号2,调用管理模式下的do_led_off函数
int led_on(int led_no){
int ret; // 返回值
__asm{ // 由于C程序中没有SWI对应表达式,所以使用混合编程
mov r0, led_no // 根据ATPCS规则,r0存放第一个参数
swi __led_on_swi_no // 产生SWI软中断,中断号为__led_on_swi_no
mov ret, r0 // 软中断处理结束,取得中断处理返回值,传递给ret变量
}
return ret; // 将ret返回给调用led_on的语句
}
int led_off(int led_no){
int ret; // 返回值
__asm{ // 由于C程序中没有SWI对应表达式,所以使用混合编程
mov r0, led_no // 根据ATPCS规则,r0存放第一个参数
swi __led_off_swi_no // 产生SWI软中断,中断号为__led_off_swi_no
mov ret, r0 // 软中断处理结束,取得中断处理返回值,传递给ret变量
}
return ret; // 将ret返回给调用led_off的语句
}
led.h:
Led系统调用头文件。
extern int led_on(int num);
extern int led_off(int num);
sys_call.c:
本程序文件主要是系统调用接口内核空间do_led_on,do_led_off函数的实现。
#include "register.h"
/* Led1~Led4初始化 */
#define LED1 (1<<5) //LED1 GPBDAT[5]
#define LED2 (1<<6) //LED2 GPBDAT[6]
#define LED3 (1<<7) //LED3 GPBDAT[7]
#define LED4 (1<<8) //LED4 GPBDAT[8]
/* 点亮对应num号Led */
extern int do_led_on (int num)
{
switch(num)
{
case 1:
GPBDAT = GPBDAT & ~LED1; break;
case 2:
GPBDAT = GPBDAT & ~LED2; break;
case 3:
GPBDAT = GPBDAT & ~LED3; break;
case 4:
GPBDAT = GPBDAT & ~LED4; break;
default:
return 0;
}
return num;
}
/* 关闭对应num号Led */
extern int do_led_off(int num)
{
switch(num)
{
case 1:
GPBDAT = GPBDAT | LED1; break;
case 2:
GPBDAT = GPBDAT | LED2; break;
case 3:
GPBDAT = GPBDAT | LED3; break;
case 4:
GPBDAT = GPBDAT | LED4; break;
default:
return 0;
}
return num;
}