MIL boosting Online Tracking
Robust Object Tracking with Online Multimple Instance Learning
作者Boris Babenko,该算法算是tracking中比较牛的算法之一
http://vision.ucsd.edu/~bbabenko/project_miltrack.shtml该主页对算法有比较详细的介绍
看看论文题目就大概知道这是一个什么样的算法组合,MIL + boosting
该算法能更加鲁棒性的更新模型表面特征,能够处理没有快速变化的遮挡
/******************************************************************************************************************************************/
MILtrack框架:
/******************************************************************************************************************************************/
input:第k个视频帧
1、根据前一帧的对象位置,在一个给点的范围r,从当前帧提取一组图片,计算该组图片的特征
2、使用我们训练好的boosting强分类器估计1中所有提取出的图片x,p(y=1|x)的值。(即该图片为正样本的概率)
![]()
3、从2中求得的所有p(y=1|x)中选取最大值,将该图片设为我们追踪位置tracker location,

4、从当前帧的tracker location 半径为r的范围类提取一组图片集作为我们的正样本集(MIL)
![]()
从当前帧的tracker location 半径为r到b的范围类随机提取一组图片集作为我们的负样本集
![]()
5、用4中提取的正、负样本集更新强分类器
/*******************************************************************************************************************************************/
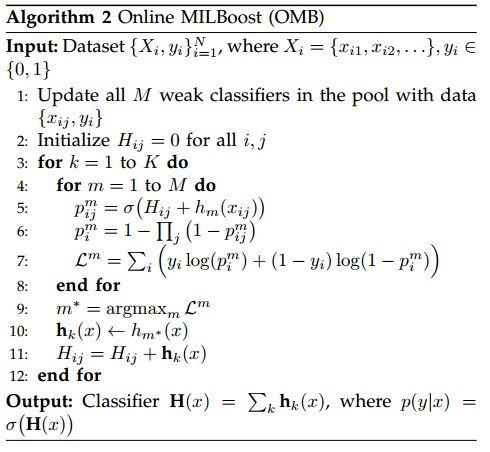
Online MIL Boost (OMB) 强分类器更新部分
/*******************************************************************************************************************************************/
1、强分类器由k个弱分类器组成,算法总是维护一个候选弱分类器池,池中有M个弱分类器,M>k。
一个弱分类器是由一个哈尔特征和四个参数(u1,g1,u0,g0)组成,(注意:这里假设了harr feature服从正态分布)
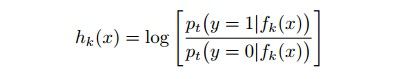
其中,
![]() y=0的情况类似,假设
y=0的情况类似,假设![]() ,然后可以利用贝叶斯公式可以计算上面弱分类器的值,每次进行到下一帧时,得到新的样例数据后进行弱分类器的参数更新,依照下列公式:
,然后可以利用贝叶斯公式可以计算上面弱分类器的值,每次进行到下一帧时,得到新的样例数据后进行弱分类器的参数更新,依照下列公式:
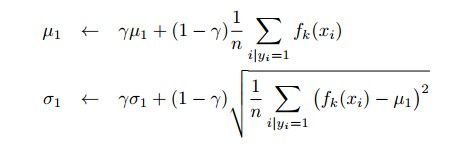
其中y为更新因子,取值范围为(0,1)
2、在线更新算法部分
2.1、样例的可能性大小计算公式:

其中为sigmod 函数,H(x)为当前强分类器
2.2、样例块的可能性大小计算公式:

其中p(yi|xij)是表示单个样例的可能性大小,yi的取值和样例块值一致
2.3、弱分类器的选择更新极大化下列公式:

其中Hk-1是前k-1个弱分类器组成的强分类器,MIL算法中加入了loss function部分
算法更新部分流程图: