OpenGL学习脚印: 模型变换(model transformation)
写在前面
前面为本节内容准备了向量和矩阵、线性变换等内容,本节开始学习OpenGL中的坐标处理。OpenGL中的坐标处理过程包括模型变换、视变换、投影变换、视口变换等内容,这个主题的内容有些多,因此分节学习,主题将分为5节内容来学习。本节主要学习模型变换。本节示例代码均可在我的github处下载。
通过本节可以了解到
- 模型变换的作用
- 模型变换的类型和计算方法
坐标处理的全局过程(了解,另文详述)
OpenGL中的坐标处理包括模型变换、视变换、投影变换、视口变换等内容,具体过程如下图1所示:

每一个过程处理都有其原因,这些内容计划将会在不同节里分别介绍,最后再整体把握一遍。
今天我们学习第一个阶段——模型变换。
为什么需要模型变换
我们在OpenGL中通过定义一组顶点来定义一个模型,或者通过其他3D建模软件事先建好模型然后导入到OpenGL中。顶点属性定义了模型。如果我们要在一个场景中不同位置显示同一个模型怎么办? 如果我们要以不同的比例、不同角度显示同一个模型又怎么办 ?
如果继续以类似的顶点属性数据定义同一个模型,调整它满足上述需求的话,不仅浪费显卡内存,而且这个调整的工作量也很大,因此效率很低。更好地解决方法是,我们定义的模型根据需要可以执行放大、缩小等操作来不同比例显示,可以通过平移来放在不同位置,可以通过旋转来按不同角度显示。这种方式就是执行模型变换。
模型变换通过对模型执行平移(translation)、缩放(scale)、旋转(rotation)、镜像(reflection)、错切(shear)等操作,来调整模型的过程。通过模型变换,我们可以按照合理方式指定场景中物体的位置等信息。
平移变换
平移就是将物体从一个位置 p=(x,y,z) ,移动到另一个位置 p′=(x′,y′,z′) 的过程,记为 p′=p+d ,其中 d=(x′−x,y′−y,z′−z)=(tx,ty,tz) 。使用齐次坐标系表示为:
如果对向量和矩阵不熟悉,可以回过去看前面介绍的向量和矩阵;如果对上面使用的齐次坐标系不熟悉,可以回过去看前面介绍的线性变换部分。
本节的模型变换在OpenGL程序中,可以使用GLM数学库实现。例如平移变换实现如下:
glm::mat4 model; // 构造单位矩阵
model = glm::translate(model, glm::vec3(-0.5f, 0.0f, 0.0f));上述表示平移向量为(-0.5,0.0,0.0),得到一个平移矩阵存储到model中。
在程序中我们绘制了4个矩形,通过平移将其放在不同位置,效果如下图所示:
在上图示例中,我们使用不同的着色器还绘制了坐标轴,坐标轴通过箭头和轴线绘制。在xoy坐标系中,第一个象限为原图,第二个象限为平移(-0.5,0.0,0.0)后的矩形,第三象限为平移(-0.8,-0.8,0.0)后的矩形,第四个象限为平移(0.0,-0.5,0.0)后的矩形。
注意 通过上面坐标处理的全局过程图1可以看到,实际顶点输出还需要经过视变换、投影变换过程等处理,本节主要讨论模型变换,因此我们在代码中,不考虑视变换和投影变换,使用默认的视变换和投影变换,即这两个变换保持为单位矩阵。默认的方式就是我们一直在使用的正交投影方式。变换矩阵在着色器中使用uniform变量传递,在c++程序中使用glm::mat4与之对应。对uniform变量不熟悉的话,可以回过头去看2D纹理部分的使用方法。
设置默认视变换和投影变换矩阵的代码如下:
glm::mat4 projection;// 投影变换矩阵
glm::mat4 view; // 视变换矩阵
glm::mat4 model; // 模型变换矩阵
glUniformMatrix4fv( glGetUniformLocation(shader.programId,"projection"), 1, GL_FALSE, glm::value_ptr(projection));
glUniformMatrix4fv( glGetUniformLocation(shader.programId,"view"), 1,GL_FALSE, glm::value_ptr(view));绘制四个矩形的代码为:
// 绘制第一个矩形
glUniformMatrix4fv(
glGetUniformLocation(shader.programId, "model"),
1, GL_FALSE, glm::value_ptr(model));
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, 0);
// 绘制第二个矩形
model = glm::mat4();
model = glm::translate(model, glm::vec3(-0.5f, 0.0f, 0.0f));
glUniformMatrix4fv(
glGetUniformLocation(shader.programId, "model"),
1, GL_FALSE, glm::value_ptr(model));
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, 0);
// 绘制第三个矩形
model = glm::mat4();
model = glm::translate(model, glm::vec3(-0.8f, -0.8f, 0.0f));
glUniformMatrix4fv(
glGetUniformLocation(shader.programId, "model"), 1, GL_FALSE, glm::value_ptr(model));
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, 0);
// 绘制第四个矩形
model = glm::mat4();
model = glm::translate(model, glm::vec3(0.0f, -0.5f, 0.0f));
glUniformMatrix4fv(
glGetUniformLocation(shader.programId, "model"),1, GL_FALSE, glm::value_ptr(model));
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, 0);这里绘制矩形使用的顶点属性数据,以及纹理使用方法,可以回过头去查看上一节2D纹理映射内容。
本节绘制矩形的顶点着色器中都使用代码:
#version 330
layout(location = 0) in vec3 position;
layout(location = 1) in vec3 color;
layout(location = 2) in vec2 textCoord;
out vec3 VertColor;
out vec2 TextCoord;
uniform mat4 projection;
uniform mat4 view;
uniform mat4 model;
void main()
{
gl_Position =
projection * view * model * vec4(position, 1.0);
VertColor = color;
TextCoord = textCoord;
}本节绘制矩形的片元着色器中都使用代码:
#version 330
in vec3 VertColor;
in vec2 TextCoord;
uniform sampler2D tex;
out vec4 color;
void main()
{
color = texture(tex, vec2(TextCoord.s, 1.0 -TextCoord.t) );
}代码中使用坐标vec2(TextCoord.s, 1.0 -TextCoord.t)表示将纹理的y轴翻转,避免纹理倒立显示。
在坐标和变换的数学基础一节中,我们已经提到,对于4x4仿射变换矩阵,可以表示平移(仿射变换)、缩放、旋转等线性变换,其中矩阵的形式为:

记住这一点,对于矩阵形式理解会比较清楚。
缩放变换
缩放可以沿着三个坐标轴的方向独立进行,当缩放参数一致时是均匀缩放,否则是非均匀缩放。对于以原点为中心的缩放来讲,根据坐标和变换的数学基础,一节所得到的结论:线性变换矩阵为变换后基向量组成。缩放因子为 (sx,sy,sz) ,则得到缩放后的+x轴基向量为 (sx,0,0) ,+y轴基向量为 (0,sy,0) ,+z轴缩放后基向量为 (0,0,sz) ,由这些基向量组成的缩放矩阵的前三列,构成4x4矩阵后表示为:
注意 设一个方向的缩放因子为 k ,当 k>0 表示物体变长;当 k=0 时表示正交投影,此时有一些维度的信息变为0了;当 k<0 时物体将会发射,即发生镜像变换,后面会介绍镜像变换。
执行缩放变换,效果如下图所示:
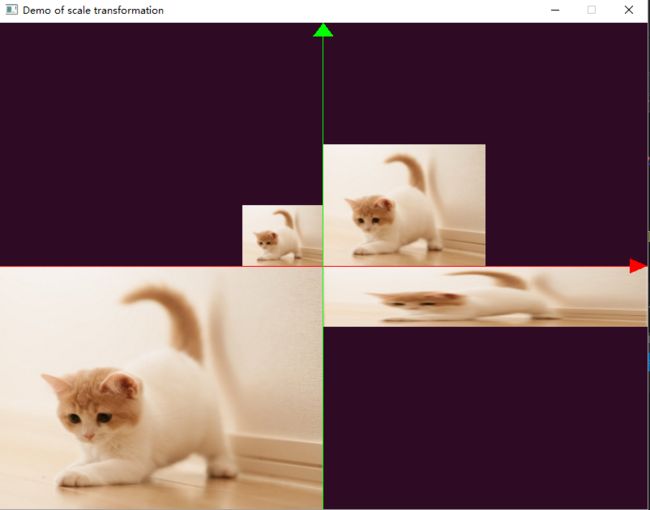
上图中,第一象限为原图,第二象限为均匀缩放0.5倍,然后平移(-0.25, 0.0,0.0)后的结果;第三象限为均匀缩放2.0倍,然后平移(-1.0, -1.0,0.0)后的结果;第四象限为缩放(2.0,0.5,1.0)后,平移(0.0,-0.25,0.0)后的结果。例如第四象限使用的代码为:
// 绘制第四个矩形 x轴放大两倍 y轴缩小为一半 平移到第四象限
model = glm::mat4();
model = glm::translate(model, glm::vec3(0.0f, -0.25f, 0.0f));
model = glm::scale(model, glm::vec3(2.0f, 0.5f, 1.0f));
glUniformMatrix4fv(
glGetUniformLocation(shader.programId, "model"),
1, GL_FALSE, glm::value_ptr(model));
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, 0);这里需要注意几点:
(1) 模型变换进行的顺序与结果是相关的。在向量和矩阵一节已经讲过,矩阵乘法不满足交换律,即 AB≠BA ,因此变换的顺序会影响最终结果。
(2) 上述第四个象限矩形,先进行缩放,然后平移到第四象限,这个过程表示为 p′=T∗S∗p ,根据结合了,可以写为 p′=(T∗S)p=Mp ,即只需要在CPU中计算出最终的变换矩阵M即可,而不是在顶点着色器中完成矩阵乘法。
(3)上述代码中,要按照先缩放后平移来完成模型变换,代码书写的顺序和我们变换的顺序是相反的,主要原因是:
model = glm::mat4();
model = glm::translate(model, glm::vec3(0.0f, -0.25f, 0.0f));
model = glm::scale(model, glm::vec3(2.0f, 0.5f, 1.0f));这个代码等价于:
translate = glm::translate(glm::mat4(), glm::vec3(0.0f, -0.25f, 0.0f));
scale = glm::scale(glm::mat4(), glm::vec3(2.0f, 0.5f, 1.0f));
model = translate * scale也就是说glm::scale是对单位矩阵进行缩放,然后左乘平移矩阵。这一点尤其要注意。
旋转变换
对于以原点为中心的旋转来讲,旋转矩阵可以这样来推导。以下面的绕+z轴的旋转角度 θ 为例,从xoy轴角度来看如下图所示:
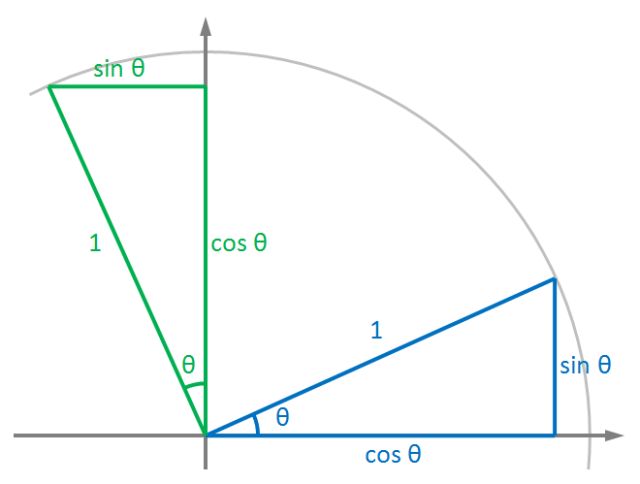
这样经过旋转以后,原来的+x轴对应的基向量 (1,0,0) 变为 (cosθ,sinθ,0) ;原来的+y轴对应的基向量 (0,1,0) 变为 (−sinθ,cosθ,0) ;而+z轴保持不变,为 (0,0,1) ,由三个变换后的基向量构成旋转矩阵的前三列,以4x4矩阵形式书写为:
对于绕y轴,x轴的旋转同理可得到旋转矩阵如下:
不动点与旋转和缩放
对于旋转和缩放来说,我们上面得出的矩阵,都是针对物体以原点为中心进行的旋转和缩放,这种中心点称为不动点 pf 。对于不动点不再原点的旋转,获取旋转矩阵的思路是:先把物体的中心移到原点,然后应用上面的旋转矩阵,最后再把物体移回到原处,使得它的中心仍旧位于 pf 。这一过程表示为:
M=T(pf)R(θ)T(−pf)(旋转中心问题)
对于缩放的缩放中心也有类似处理。
执行旋转变换,效果如下图所示:
其中,第一象限为原图,第二象限为绕+z轴旋转90度;第三象限为以中心点(0.25,0.25,0.0)旋转,平移(-0.5,-0.5,0.0)到第三象限的结果;第四象限为绕着右下角(0.5,0.0,0.0)旋转,平移(0.0, -0.5,0.0)到第四象限的结果。例如第三象限的绘制代码为:
// 绘制第三个矩形 绕着矩形中心旋转
model = glm::mat4();
// 平移至第三象限
model = glm::translate(model, glm::vec3(-0.5f, -0.5f, 0.0f));
// 下面为绕着中心旋转的三个矩阵
model = glm::translate(model, glm::vec3(0.25f, 0.25f, 0.0f));
model = glm::rotate(model, (GLfloat)glfwGetTime() * 2.0f,
glm::vec3(0.0f, 0.0f, 1.0f));
model = glm::translate(model, glm::vec3(-0.25f, -0.25f, 0.0f));
glUniformMatrix4fv(
glGetUniformLocation(shader.programId, "model"),
1, GL_FALSE, glm::value_ptr(model));
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, 0);注意上面代码中,为了实现绕着矩形中心(0.25,0.25,0.0)旋转,先要平移至原点,然后旋转,最后平移至中心;为了实现平移至第三象限,实行平移变换(-0.5,-0.5,0.0)。
镜像变换
镜像变换,就是反射成像的概念,它是缩放变换的一个特例,当缩放因子 k<0 时会导致镜像变换。执行镜像变换后的效果如下图所示:
上面图中,第一象限为原图,第二象限为关于y轴的镜像,即点 (x,y,z) 镜像后点为 (−x,y,z) ,因此所求矩阵为:
可以看出这个矩阵,就是上面的缩放矩阵,当缩放因子为(-1.0,1.0,1.0)时的矩阵。因此实现时代码为:
// 绘制第二个矩形 沿着y轴镜像
model = glm::mat4();
model = glm::scale(model, glm::vec3(-1.0f, 1.0f, 1.0f));
glUniformMatrix4fv(
glGetUniformLocation(shader.programId, "model"),
1, GL_FALSE, glm::value_ptr(model));
glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_SHORT, 0);上图中,第三象限为以xy轴同时反射形成,缩放因子为(-1.0,-1.0,1.0);第四象限为以x轴进行反射,缩放因子为(1.0, -1.0, 1.0)。
最后说明
上面讨论的模型变换部分涉及到了平移、缩放、旋转和镜像变换,在实际中多半是这些变换的组合,一般地执行变换顺序为缩放–》旋转—》平移。在实行模型变换时,要注意变换的顺序和代码中书写的顺序相反。同时对于缩放和旋转变换,要注意不动点不在原点时的处理方法。对于绕任意方向的旋转,需要推导一个新的旋转矩阵,这个内容会放在数学相关的小节介绍。