隐马尔可夫模型(HMM) - 4 - 预测算法(维特比算法)
声明:
1,本篇为个人对《2012.李航.统计学习方法.pdf》的学习总结,不得用作商用,欢迎转载,但请注明出处(即:本帖地址)。
2,由于本人在学习初始时有很多数学知识都已忘记,所以为了弄懂其中的内容查阅了很多资料,所以里面应该会有引用其他帖子的小部分内容,如果原作者看到可以私信我,我会将您的帖子的地址付到下面。
3,如果有内容错误或不准确欢迎大家指正。
4,如果能帮到你,那真是太好了。
这里介绍隐马尔可夫模型预测的两种算法:近似算法与维特比算法。
近似算法
近似算法的想法是:在每个时刻t选择在该时刻最有可能出现的状态it*,从而得到一个状态序列I* = (i1*,i2*, ..., iT*),将它作为预测的结果。
给定隐马尔可夫模型λ和观测序列O,在时刻t处于状态qi的概率γt(i)是
在每一时刻t最有可能的状态it*是
从而得到状态序列I* =(i1*, i2*, ..., iT*)。
近似算法的有点是计算简单,其缺点是不能保证预测的状态序列整体是最有可能的状态序列,因为预测的状态序列可能有实际不发生的部分。
事实上,上述方法得到的状态序列中有可能存在转移概率为0的相邻状态,即,对某些i, j,aij=0。
尽管如此,近似算法仍然是有用的。
维特比算法
维特比算法实际上用动态规划隐马尔可夫模型预测问题,即,用动态规划(dunamic programming)求概率最大路径(最优路径)。这时一条路径对应着一个状态序列。
根据动态规划原来,最优路径具有这样的特征:如果最优路径在时刻t通过节点it*,那么这一路径中“从节点i1*到终点it*的部分路径”对于“从节点i1*到终点it*的所有可能的部分路径”来说必须是最优的。
根据这一原理,我们只需从时刻t=1开始,递推的计算在时刻t状态为i的各条部分路径的最大概率,直至得到时刻t=T时状态为i的各条路径的最大概率。时刻t=T的最大概率即为最优路径的概率P*,最优路径的终点it*也就同时得到了。
之后,为了找出最优路径的各个节点,从终结点iT*开始,由后向前逐步求得节点iT-1*,..., i1*,得到最优路径I* = (i1*, i2*, ..., iT*)。
这就是维特比算法。
首先导入两个变量δ和ψ。定义在时刻t状态为i的所有单个路径(i1, i2, ..., it)中概率最大值为:
![]()
由定义可得变量δ的递推公式:

定义在时刻t状态为i的所有单个路径(i1,i2, ... , it-1, it)中概率最大的路径的第t-1个节点为
于是维特比算法如下。
算法(维特比算法):
输入:模型λ= (A, B,π)和观测O=(o1,o2, ..., oT);
输出:最优路径I* = (i1*,i2*, ..., iT*)。
过程:

例子
考虑盒子和球模型λ=(A, B,π),状态集合Q={1, 2, 3},观测集合V={红, 白},
已知观测序列O=(红,白,红),试求最优状态序列,即最优路径I* = (i1*, i2*, i3*)。
解:
如下图所示(图中的数字在之后的步骤中会一一推导出来)
要在所有可能的路径中选择一条最优路径,按照以下步骤出来。
1,初始化
在t=1时,对每个状态i,i=1, 2, 3,求状态为i观测o1为红的概率,记此概率为δ1(i),则:
δ1(i) = πibi(o1) =πibi(红), i = 1, 2, 3
代入实际数据
δ1(1) = 0.10,δ1(2) = 0.16,δ1(3) = 0.28
记ψ1(i) = 0,i = 1, 2, 3。
2,在t=n时
在t=2时,对每个状态i, i =1,2,3,求在t=1时状态为j观测为红并在t=2时状态为i观测o2为白的路径的最大概率,记此最大概率为δ2(i),则:
![]()
同时,对每个状态i, i= 1, 2, 3,记录概率最大路径的前一个状态j:
计算:
同样,在t=3时
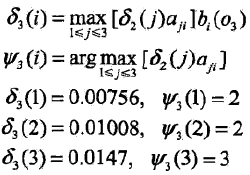
3,求最优路径的终点
以P*表示最优路径的概率,则
最优路径的终点是i3*:
![]()
4,逆向找i2*,i1*:
在t=2时,i2*= ψ3(i3*) =ψ3(3) = 3
在t=2时,i1*= ψ2(i2*) =ψ2(3) = 3
于是求得最优路径,即最有状态序列I* = (i1*, i2*, i3*)= (3, 3, 3)。