安卓 方向传感器The field Sensor.TYPE_ORIENTATION is deprecated use SensorManager.getOrientation()instead介绍
参考文章:http://blog.csdn.net/octobershiner/article/details/6641942
在做方向传感器时发现问题mSensorManager.getDefaultSensor(Sensor.TYPE_ORIENTATION)化上了横线并warnning:mSensorManager.getDefaultSensor(Sensor.TYPE_ORIENTATION) use SensorManager.getOrientation()
但是use SensorManager.getOrientation()方法又带有参数
此处介绍一下use SensorManager.getOrientation()方法的使用,不看此方法的使用很难来了解到这里的方向传感器(并非真正的硬件)实际上是使用一个加速度传感器一个磁场传感器两者共同使用完成的方向传感器的效果,为了达到更加准确
下面借用的是http://blog.csdn.net/octobershiner/article/details/6641942的原文
晚上好~今天继续给大家分享一下第二个重要的感应器,其实获取方向本应该很简单的事情,在文章一中看到 有个TYPE_ORIENTATION 关键字,说明可以直接获取设备的移动方向,但是最新版的SDK加上了这么一句话“TYPE_ORIENTATION This constant is deprecated. use SensorManager.getOrientation() instead. ”也就是说,这种方式已经被取消,要开发者使用 SensorManager.getOrientation()来获取原来的数据。
实际上,android获取方向是通过磁场感应器和加速度感应器共同获得的,至于具体的算法SDK已经封装好了。也就是说现在获取用户方向有两种方式,一是官方推荐的,通过SensorManager.getOrientation()来获取,这个方法表面看似容易(那是因为你还没看到他的参数。。一会再说),但实际上需要用到两个感应器共同完成工作,特点是更加的准确。第二种方法非常简单,就像前一篇文章获取加速度一样,直接得到三个轴上的数据。
额,从难一些的介绍吧,因为毕竟第一种方法会是android未来的一个选择,第二种不知道什么时候就要成为历史了。
android给我们提供的方向数据是一个float型的数组,包含三个方向的值 如图
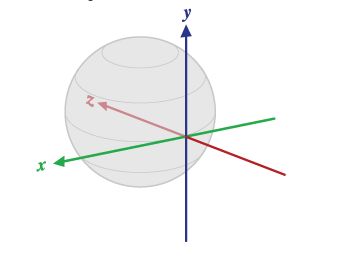
当你的手机水平放置时,被默认为静置状态,即XY角度均为0
values[0] 表示Z轴的角度:方向角,我们平时判断的东西南北就是看这个数据的,经过我的实验,发现了一个有意思的事情,也就是说使用第一种方式获得方向(磁场+加速度)得到的数据范围是(-180~180),也就是说,0表示正北,90表示正东,180/-180表示正南,-90表示正西。而第二种方式(直接通过方向感应器)数据范围是(0~360)360/0表示正北,90表示正东,180表示正南,270表示正西。
values[1] 表示X轴的角度:俯仰角 即由静止状态开始,前后翻转
values[2] 表示Y轴的角度:翻转角 即由静止状态开始,左右翻转
可见统一获取方向的方法是必须的,因为处理这些数据的算法可能针对第一种获取方式,那么当用在第二种方式时,移植性就不好了。
看下面的方法
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
public static float[] getOrientation (float[] R, float[] values)
Computes the device's orientation based on the rotation matrix.
When it returns, the array values is filled with the result:
- values[0]: azimuth, rotation around the Z axis.
- values[1]: pitch, rotation around the X axis.
- values[2]: roll, rotation around the Y axis.
The reference coordinate-system used is different from the world coordinate-system defined for the rotation matrix:
- X is defined as the vector product Y.Z (It is tangential to the ground at the device's current location and roughly points West).
- Y is tangential to the ground at the device's current location and points towards the magnetic North Pole.
- Z points towards the center of the Earth and is perpendicular to the ground.
All three angles above are in radians and positive in the counter-clockwise direction.
通常我们并不需要获取这个函数的返回值,这个方法会根据参数R[]的数据填充values[]而后者就是我们想要的。
那么R表示什么呢?又将怎么获取呢?
R[] 是一个旋转矩阵,用来保存磁场和加速度的数据,大家可以理解未加工的方向数据吧
R通过下面的静态方法获取,这个方法也是用来填充R[]
public static boolean getRotationMatrix (float[] R, float[] I, float[] gravity, float[] geomagnetic)
解释以下参数,第一个就是我们需要填充的R数组,大小是9
第二个是是一个转换矩阵,将磁场数据转换进实际的重力坐标中 一般默认情况下可以设置为null
第三个是一个大小为3的数组,表示从加速度感应器获取来的数据 在onSensorChanged中
第四个是一个大小为3的数组,表示从磁场感应器获取来的数据 在onSensorChanged中
好了基本逻辑就是这样的,下面给大家演示一个简单的测试方向的例子,可以时刻监听用户的方向
- /*
- * @author octobershiner
- * 2011 07 28
- * SE.HIT
- * 一个演示通过磁场和加速度两个感应器获取方向数据的例子
- * */
- package uni.sensor;
- import android.app.Activity;
- import android.content.Context;
- import android.hardware.Sensor;
- import android.hardware.SensorEvent;
- import android.hardware.SensorEventListener;
- import android.hardware.SensorManager;
- import android.os.Bundle;
- import android.util.Log;
- public class OrientationActivity extends Activity{
- private SensorManager sm;
- //需要两个Sensor
- private Sensor aSensor;
- private Sensor mSensor;
- float[] accelerometerValues = new float[3];
- float[] magneticFieldValues = new float[3];
- private static final String TAG = "sensor";
- @Override
- public void onCreate(Bundle savedInstanceState) {
- // TODO Auto-generated method stub
- super.onCreate(savedInstanceState);
- setContentView(R.layout.main);
- sm = (SensorManager)getSystemService(Context.SENSOR_SERVICE);
- aSensor = sm.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
- mSensor = sm.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD);
- sm.registerListener(myListener, aSensor, SensorManager.SENSOR_DELAY_NORMAL);
- sm.registerListener(myListener, mSensor,SensorManager.SENSOR_DELAY_NORMAL);
- //更新显示数据的方法
- calculateOrientation();
- }
- //再次强调:注意activity暂停的时候释放
- public void onPause(){
- sm.unregisterListener(myListener);
- super.onPause();
- }
- final SensorEventListener myListener = new SensorEventListener() {
- public void onSensorChanged(SensorEvent sensorEvent) {
- if (sensorEvent.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD)
- magneticFieldValues = sensorEvent.values;
- if (sensorEvent.sensor.getType() == Sensor.TYPE_ACCELEROMETER)
- accelerometerValues = sensorEvent.values;
- calculateOrientation();
- }
- public void onAccuracyChanged(Sensor sensor, int accuracy) {}
- };
- private void calculateOrientation() {
- float[] values = new float[3];
- float[] R = new float[9];
- SensorManager.getRotationMatrix(R, null, accelerometerValues, magneticFieldValues);
- SensorManager.getOrientation(R, values);
- // 要经过一次数据格式的转换,转换为度
- values[0] = (float) Math.toDegrees(values[0]);
- Log.i(TAG, values[0]+"");
- //values[1] = (float) Math.toDegrees(values[1]);
- //values[2] = (float) Math.toDegrees(values[2]);
- if(values[0] >= -5 && values[0] < 5){
- Log.i(TAG, "正北");
- }
- else if(values[0] >= 5 && values[0] < 85){
- Log.i(TAG, "东北");
- }
- else if(values[0] >= 85 && values[0] <=95){
- Log.i(TAG, "正东");
- }
- else if(values[0] >= 95 && values[0] <175){
- Log.i(TAG, "东南");
- }
- else if((values[0] >= 175 && values[0] <= 180) || (values[0]) >= -180 && values[0] < -175){
- Log.i(TAG, "正南");
- }
- else if(values[0] >= -175 && values[0] <-95){
- Log.i(TAG, "西南");
- }
- else if(values[0] >= -95 && values[0] < -85){
- Log.i(TAG, "正西");
- }
- else if(values[0] >= -85 && values[0] <-5){
- Log.i(TAG, "西北");
- }
- }
- }
实训的时间非常紧张,抽时间写总结感觉很累,但是感觉收获很多,如果有时间的话,也想给大家分享第二种方法,和这种比起来简单很多,其实大家可以完全参考上篇文章中的代码http://blog.csdn.net/octobershiner/article/details/6639040
只要把其中的两个Sensor。TYPE_ACCELEROMETER改成 Sensor.TYPE_ORIENTATIO就好了,但是今天分享的方法大家最好掌握,这应该是未来android的标准。