LeapMotion开发(一)--下载安装以及C++环境配置
手边还有一台快生锈的leap motion,闲来无事捣鼓下,先来写几篇入门的教程,之后会写点简单好玩的demo~~~
准备工作:
LeapmotionSDK下载:
https://developer.leapmotion.com/get-started?id=v3-developer-beta&platform=windows&version=3.1.3.41910
解压之后双击EXE安装SDK
安装完SDK之后打开App Home,注册登录之后就可以试下最简单的demo感受下效果,如果提示leap motion未连接,可以拔掉重试或者点开桌面右下角leap motion的图标检查故障,如果能正常运行程序那么说明我们的硬件部分没有问题。
下面可以打开Leap_Motion_SDK_Win_3.1.3\LeapSDK\samples目录下的sln文件测试C++能否正常运行,本文用的VS2015,提示版本不兼容的时候直接升版本就好,如果用的VS2010或者VS2012选择对应版本的Sln即可。
下面介绍如何新建一个Leap motion项目配置环境并成功运行示例程序。
类似于opencv的配置环境,我们需要做三件事儿:
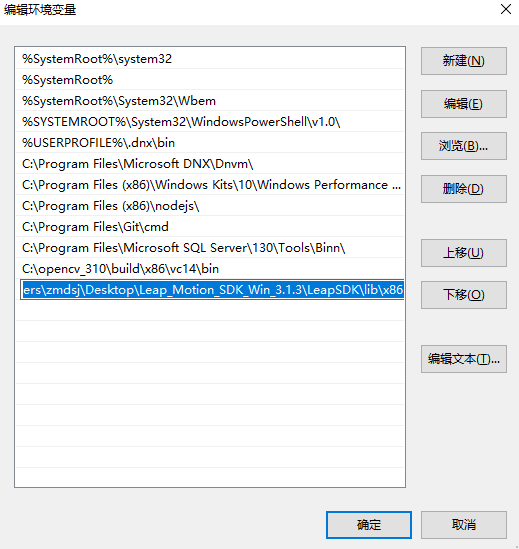
1. 把dll添加进环境变量(如果不想添加进环境变量可以把dll拷贝进调试目录)
路径为:C:\Users\zmdsj\Desktop\Leap_Motion_SDK_Win_3.1.3\LeapSDK\lib\x86
2. 添加附加依赖项
项目-属性-连接器-输入-附加依赖项添加Leap.lib
3. 添加包含目录和库目录
包含目录C:\Users\zmdsj\Desktop\Leap_Motion_SDK_Win_3.1.3\LeapSDK\include
库目录:C:\Users\zmdsj\Desktop\Leap_Motion_SDK_Win_3.1.3\LeapSDK\lib
下面新建一个cpp文件将以下代码复制粘贴上即可(就是sample.cpp)
/******************************************************************************\
* Copyright (C) 2012-2016 Leap Motion, Inc. All rights reserved. *
* Leap Motion proprietary and confidential. Not for distribution. *
* Use subject to the terms of the Leap Motion SDK Agreement available at *
* https://developer.leapmotion.com/sdk_agreement, or another agreement *
* between Leap Motion and you, your company or other organization. *
\******************************************************************************/
#include <iostream>
#include <cstring>
#include "Leap.h"
using namespace Leap;
class SampleListener : public Listener {
public:
virtual void onInit(const Controller&);
virtual void onConnect(const Controller&);
virtual void onDisconnect(const Controller&);
virtual void onExit(const Controller&);
virtual void onFrame(const Controller&);
virtual void onFocusGained(const Controller&);
virtual void onFocusLost(const Controller&);
virtual void onDeviceChange(const Controller&);
virtual void onServiceConnect(const Controller&);
virtual void onServiceDisconnect(const Controller&);
virtual void onServiceChange(const Controller&);
virtual void onDeviceFailure(const Controller&);
virtual void onLogMessage(const Controller&, MessageSeverity severity, int64_t timestamp, const char* msg);
};
const std::string fingerNames[] = { "Thumb", "Index", "Middle", "Ring", "Pinky" };
const std::string boneNames[] = { "Metacarpal", "Proximal", "Middle", "Distal" };
void SampleListener::onInit(const Controller& controller) {
std::cout << "Initialized" << std::endl;
}
void SampleListener::onConnect(const Controller& controller) {
std::cout << "Connected" << std::endl;
}
void SampleListener::onDisconnect(const Controller& controller) {
// Note: not dispatched when running in a debugger.
std::cout << "Disconnected" << std::endl;
}
void SampleListener::onExit(const Controller& controller) {
std::cout << "Exited" << std::endl;
}
void SampleListener::onFrame(const Controller& controller) {
// Get the most recent frame and report some basic information
const Frame frame = controller.frame();
std::cout << "Frame id: " << frame.id()
<< ", timestamp: " << frame.timestamp()
<< ", hands: " << frame.hands().count()
<< ", extended fingers: " << frame.fingers().extended().count() << std::endl;
HandList hands = frame.hands();
for (HandList::const_iterator hl = hands.begin(); hl != hands.end(); ++hl) {
// Get the first hand
const Hand hand = *hl;
std::string handType = hand.isLeft() ? "Left hand" : "Right hand";
std::cout << std::string(2, ' ') << handType << ", id: " << hand.id()
<< ", palm position: " << hand.palmPosition() << std::endl;
// Get the hand's normal vector and direction
const Vector normal = hand.palmNormal();
const Vector direction = hand.direction();
// Calculate the hand's pitch, roll, and yaw angles
std::cout << std::string(2, ' ') << "pitch: " << direction.pitch() * RAD_TO_DEG << " degrees, "
<< "roll: " << normal.roll() * RAD_TO_DEG << " degrees, "
<< "yaw: " << direction.yaw() * RAD_TO_DEG << " degrees" << std::endl;
// Get the Arm bone
Arm arm = hand.arm();
/*
std::cout << std::string(2, ' ') << "Arm direction: " << arm.direction()
<< " wrist position: " << arm.wristPosition()
<< " elbow position: " << arm.elbowPosition() << std::endl;
*/
// Get fingers
const FingerList fingers = hand.fingers();
for (FingerList::const_iterator fl = fingers.begin(); fl != fingers.end(); ++fl) {
const Finger finger = *fl;
/*
std::cout << std::string(4, ' ') << fingerNames[finger.type()]
<< " finger, id: " << finger.id()
<< ", length: " << finger.length()
<< "mm, width: " << finger.width() << std::endl;
*/
// Get finger bones
for (int b = 0; b < 4; ++b) {
Bone::Type boneType = static_cast<Bone::Type>(b);
Bone bone = finger.bone(boneType);
/*
std::cout << std::string(6, ' ') << boneNames[boneType]
<< " bone, start: " << bone.prevJoint()
<< ", end: " << bone.nextJoint()
<< ", direction: " << bone.direction() << std::endl;
*/
}
}
}
if (!frame.hands().isEmpty()) {
std::cout << std::endl;
}
}
void SampleListener::onFocusGained(const Controller& controller) {
std::cout << "Focus Gained" << std::endl;
}
void SampleListener::onFocusLost(const Controller& controller) {
std::cout << "Focus Lost" << std::endl;
}
void SampleListener::onDeviceChange(const Controller& controller) {
std::cout << "Device Changed" << std::endl;
const DeviceList devices = controller.devices();
for (int i = 0; i < devices.count(); ++i) {
std::cout << "id: " << devices[i].toString() << std::endl;
std::cout << " isStreaming: " << (devices[i].isStreaming() ? "true" : "false") << std::endl;
std::cout << " isSmudged:" << (devices[i].isSmudged() ? "true" : "false") << std::endl;
std::cout << " isLightingBad:" << (devices[i].isLightingBad() ? "true" : "false") << std::endl;
}
}
void SampleListener::onServiceConnect(const Controller& controller) {
std::cout << "Service Connected" << std::endl;
}
void SampleListener::onServiceDisconnect(const Controller& controller) {
std::cout << "Service Disconnected" << std::endl;
}
void SampleListener::onServiceChange(const Controller& controller) {
std::cout << "Service Changed" << std::endl;
}
void SampleListener::onDeviceFailure(const Controller& controller) {
std::cout << "Device Error" << std::endl;
const Leap::FailedDeviceList devices = controller.failedDevices();
for (FailedDeviceList::const_iterator dl = devices.begin(); dl != devices.end(); ++dl) {
const FailedDevice device = *dl;
std::cout << " PNP ID:" << device.pnpId();
std::cout << " Failure type:" << device.failure();
}
}
void SampleListener::onLogMessage(const Controller&, MessageSeverity s, int64_t t, const char* msg) {
switch (s) {
case Leap::MESSAGE_CRITICAL:
std::cout << "[Critical]";
break;
case Leap::MESSAGE_WARNING:
std::cout << "[Warning]";
break;
case Leap::MESSAGE_INFORMATION:
std::cout << "[Info]";
break;
case Leap::MESSAGE_UNKNOWN:
std::cout << "[Unknown]";
}
std::cout << "[" << t << "] ";
std::cout << msg << std::endl;
}
int main(int argc, char** argv) {
// Create a sample listener and controller
SampleListener listener;
Controller controller;
// Have the sample listener receive events from the controller
controller.addListener(listener);
if (argc > 1 && strcmp(argv[1], "--bg") == 0)
controller.setPolicy(Leap::Controller::POLICY_BACKGROUND_FRAMES);
controller.setPolicy(Leap::Controller::POLICY_ALLOW_PAUSE_RESUME);
// Keep this process running until Enter is pressed
std::cout << "Press Enter to quit, or enter 'p' to pause or unpause the service..." << std::endl;
bool paused = false;
while (true) {
char c = std::cin.get();
if (c == 'p') {
paused = !paused;
controller.setPaused(paused);
std::cin.get(); //skip the newline
}
else
break;
}
// Remove the sample listener when done
controller.removeListener(listener);
return 0;
}
结果如图:
手指部分太多我就先注释掉了,这样看上去清爽一点,233
最后祝大家编程愉快~