串口概述
常见数据通信方式:并行通信,串行通信
UART的主要操作:
>数据发送及接受
>产生中断
>产生波特率
>Loopback模式
>红外模式
>自动流控模式
串口参数的配置主要包括:波特率、数据位、停止位、流控协议。
linux中的串口设备文件放于/de/目录下,串口一,串口二分别为"/dev/ttyS0","/dev/ttyS1".在linux下操作串口与操作文件相同.
.串口详细配置
包括:波特率、数据位、校验位、停止位等。串口设置由下面的结构体实现:
struct termios
{
tcflag_t c_iflag; //input flags
tcflag_t c_oflag; //output flags
tcflag_t c_cflag; //control flags
tcflag_t c_lflag; //local flags
cc_t c_cc[NCCS]; //control characters
};
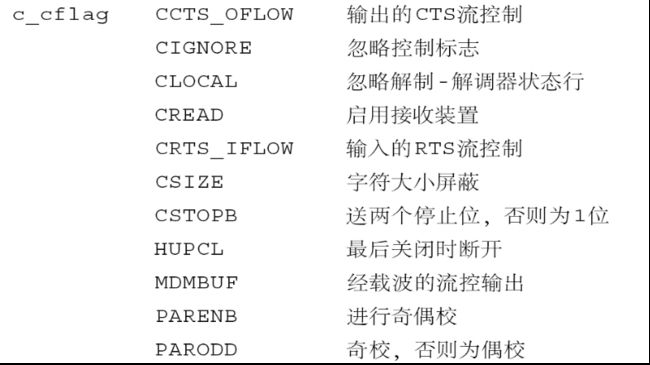
该结构体中c_cflag最为重要,可设置波特率、数据位、校验位、停止位。在设置波特率时需要在数字前加上'B',
如B9600,B15200.使用其需通过“与”“或”操作方式:
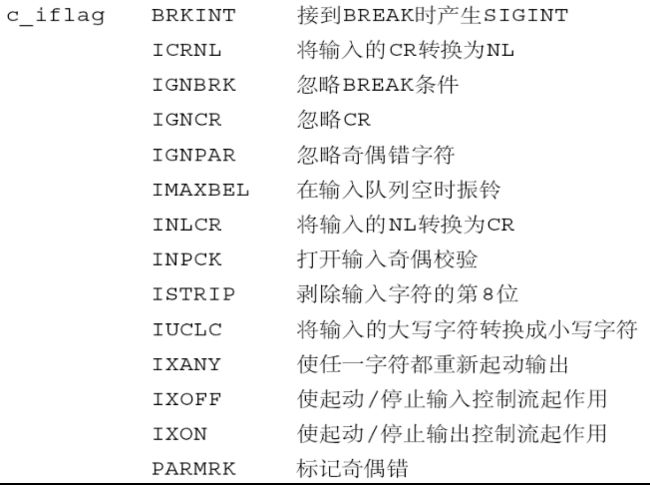
输入模式c_iflag成员控制端口接收端的字符输入处理:
.串口控制函数
Tcgetattr 取属性(termios结构)
Tcsetattr 设置属性(termios结构)
cfgetispeed 得到输入速度
Cfgetospeed 得到输出速度
Cfsetispeed 设置输入速度
Cfsetospeed 设置输出速度
Tcdrain 等待所有输出都被传输
tcflow 挂起传输或接收
tcflush 刷清未决输入和/或输出
Tcsendbreak 送BREAK字符
tcgetpgrp 得到前台进程组ID
tcsetpgrp 设置前台进程组ID
.串口配置流程
1>保存原先串口配置,用tcgetattr(fd,&oldtio)函数
struct termios newtio,oldtio;
tcgetattr(fd,&oldtio);
2>激活选项有CLOCAL和CREAD,用于本地连接和接收使用
newtio.c_cflag | = CLOCAL | CREAD;
3>设置波特率,使用函数cfsetispeed、cfsetospeed
cfsetispeed(&newtio,B115200);
cfsetospeed(&newtio,B115200);
4>设置数据位,需使用掩码设置
newtio.c_cflag &= ~CSIZE;
newtio.c_cflag |= CS8;
5>设置奇偶校验位,使用c_cflag和c_iflag.
设置奇校验:
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
设置偶校验:
newtio.c_iflag |= (INPCK|ISTRIP);
newtio.c_cflag |= PARENB;
newtio.c_cflag |= ~PARODD;
6>设置停止位,通过激活c_cflag中的CSTOPB实现。若停止位为1,则清除CSTOPB,若停止位为2,则激活CSTOPB。
newtio.c_cflag &= ~CSTOPB;
7>设置最少字符和等待时间,对于接收字符和等待时间没有特别的要求时,可设为0:
newtio.c_cc[VTIME] = 0;
newtio.c_cc[VMIN] = 0;
8>处理要写入的引用对象
tcflush函数刷清(抛弃)输入缓存(终端驱动程序已接收到,但用户程序尚未读)或输出缓存(用户程序已经写,但尚未发送).
int tcflush(int filedes,int quene)
quene数应当是下列三个常数之一:
*TCIFLUSH 刷清输入队列
*TCOFLUSH 刷清输出队列
*TCIOFLUSH 刷清输入、输出队列
例如:tcflush(fd,TCIFLUSH);
9>激活配置。在完成配置后,需要激活配置使其生效。使用tcsetattr()函数:
int tcsetattr(int filedes,int opt,const struct termios *termptr);
opt使我们可以指定在什么时候新的终端属性才起作用,
*TCSANOW:更改立即发生
*TCSADRAIN:发送了所有输出后更改才发生。若更改输出参数则应使用此选项
*TCSAFLUSH:发送了所有输出后更改才发生。更进一步,在更改发生时未读的
所有输入数据都被删除(刷清).
例如: tcsetattr(fd,TCSANOW,&newtio);
.串口使用详解
.打开串口
fd = open("/dev/ttyS0",O_RDWR | O_NOCTTY | O_NDELAY);
参数--O_NOCTTY:通知linux系统,这个程序不会成为这个端口的控制终端.
O_NDELAY:通知linux系统不关心DCD信号线所处的状态(端口的另一端是否激活或者停止).
然后恢复串口的状态为阻塞状态,用于等待串口数据的读入,用fcntl函数:
fcntl(fd,F_SETFL,0); //F_SETFL:设置文件flag为0,即默认,即阻塞状态
接着测试打开的文件描述符是否应用一个终端设备,以进一步确认串口是否正确打开.
isatty(STDIN_FILENO);
.读写串口
串口的读写与普通文件一样,使用read,write函数
read(fd,buff,8);
write(fd,buff,8);
Example: seri.c
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <errno.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <termios.h>
#include <stdlib.h>
int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop)
{
struct termios newtio,oldtio;
if ( tcgetattr( fd,&oldtio) != 0)
{
perror("SetupSerial 1");
return -1;
}
bzero( &newtio, sizeof( newtio ) );
newtio.c_cflag |= CLOCAL | CREAD;
newtio.c_cflag &= ~CSIZE;
switch( nBits )
{
case 7:
newtio.c_cflag |= CS7;
break;
case 8:
newtio.c_cflag |= CS8;
break;
}
switch( nEvent )
{
case 'O': //奇校验
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
break;
case 'E': //偶校验
newtio.c_iflag |= (INPCK | ISTRIP);
newtio.c_cflag |= PARENB;
newtio.c_cflag &= ~PARODD;
break;
case 'N': //无校验
newtio.c_cflag &= ~PARENB;
break;
}
switch( nSpeed )
{
case 2400:
cfsetispeed(&newtio, B2400);
cfsetospeed(&newtio, B2400);
break;
case 4800:
cfsetispeed(&newtio, B4800);
cfsetospeed(&newtio, B4800);
break;
case 9600:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
case 115200:
cfsetispeed(&newtio, B115200);
cfsetospeed(&newtio, B115200);
break;
default:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
}
if( nStop == 1 )
{
newtio.c_cflag &= ~CSTOPB;
}
else if ( nStop == 2 )
{
newtio.c_cflag |= CSTOPB;
}
newtio.c_cc[VTIME] = 0;
newtio.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH);
if((tcsetattr(fd,TCSANOW,&newtio))!=0)
{
perror("com set error");
return -1;
}
printf("set done!\n");
return 0;
}
int open_port(int fd,int comport)
{
char *dev[]={"/dev/ttyS0","/dev/ttyS1","/dev/ttyS2"};
long vdisable;
if (comport==1)
{ fd = open( "/dev/ttyS0", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd)
{
perror("Can't Open Serial Port");
return(-1);
}
else
{
printf("open ttyS0 .....\n");
}
}
else if(comport==2)
{ fd = open( "/dev/ttyS1", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd)
{
perror("Can't Open Serial Port");
return(-1);
}
else
{
printf("open ttyS1 .....\n");
}
}
else if (comport==3)
{
fd = open( "/dev/ttyS2", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd)
{
perror("Can't Open Serial Port");
return(-1);
}
else
{
printf("open ttyS2 .....\n");
}
}
if(fcntl(fd, F_SETFL, 0)<0)
{
printf("fcntl failed!\n");
}
else
{
printf("fcntl=%d\n",fcntl(fd, F_SETFL,0));
}
if(isatty(STDIN_FILENO)==0)
{
printf("standard input is not a terminal device\n");
}
else
{
printf("isatty success!\n");
}
printf("fd-open=%d\n",fd);
return fd;
}
int main(void)
{
int fd;
int nread,i;
char buff[]="Hello\n";
if((fd=open_port(fd,1))<0)
{
perror("open_port error");
return;
}
if((i=set_opt(fd,115200,8,'N',1))<0)
{
perror("set_opt error");
return;
}
printf("fd=%d\n",fd);
nread=read(fd,buff,8);
printf("nread=%d,%s\n",nread,buff);
close(fd);
return;
}
表 1. open() 系统调用提供的标识符
标识符名标识符描述O_RDONLY以只读的方式打开文件O_WRONLY以只写的方式打开文件O_RDWR以读写的方式打开文件O_CREAT若文件不存在,则创建该文件O_EXCL以独占模式打开文件;若同时设置 O_EXCL 和 O_CREATE, 那么若文件已经存在,则打开操作会失败O_NOCTTY若设置该描述符,则该文件不可以被当成终端处理O_TRUNC截断文件,若文件存在,则删除该文件O_APPEND若设置了该描述符,则在写文件之前,文件指针会被设置到文件的底部O_NONBLOCK以非阻塞的方式打开文件O_NELAY同 O_NELAY,若同时设置 O_NELAY 和 O_NONBLOCK,O_NONBLOCK 优先起作用O_SYNC该描述符会对普通文件的写操作产生影响,若设置了该描述符,则对该文件的写操作会等到数据被写到磁盘上才算结束FASYNC若设置该描述符,则 I/O 事件通知是通过信号发出的O_DIRECT该描述符提供对直接 I/O 的支持O_LARGEFILE该描述符提供对超过 2GB 大文件的支持O_DIRECTORY该描述符表明所打开的文件必须是目录,否则打开操作失败O_NOFOLLOW若设置该描述符,则不解析路径名尾部的符号 链接在上述代码中,有两句话特别重要:
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 13;
这两句话决定了对串口读取的函数read()的一些功能。我将着重介绍一下他们对read()函数的影响。
对串口操作的结构体是
Struct{
tcflag_t c_iflag;
tcflag_t c_oflag;
tcflag_t c_cflag;
tcflag_t c_lflag;
cc_t c_line;
cc_t c_cc[NCCS];
};
其中cc_t, c_line只有在一些特殊的系统程序(比如,设置通过tty设备来通信的网络协议)中才会用。在数组c_cc中有两个下标(VTIME和VMIN)对应的元素不是控制符,并且只是在原始模式下有效。只有在原始模式下,他们决定了read()函数在什么时候返回。在标准模式下,除非设置了O_NONBLOCK选项,否则只有当遇到文件结束符或各行的字符都已经编辑完毕后才返回。
控制符VTIME和VMIN之间有着复杂的关系。VTIME定义要求等待的零到几百毫秒的时间量(通常是一个8位的unsigned char变量,取值不能大于cc_t)。 VMIN定义了要求等待的最小字节数(不是要求读的字节数——read()的第三个参数才是指定要求读的最大字节数),这个字节数可能是0。
l) 如果VTIME取0,VMIN定义了要求等待读取的最小字节数。函数read()只有在读取了VMIN个字节的数据或者收到一个信号的时候才返回。
2) 如果VMIN取0,VTIME定义了即使没有数据可以读取,read()函数返回前也要等待几百毫秒的时间量。这时,read()函数不需要像其通常情况那样要遇到一个文件结束标志才返回0。
3) 如果VTIME和VMIN都不取0,VTIME定义的是当接收到第一个字节的数据后开始计算等待的时间量。如果当调用read函数时可以得到数据,计时器马上开始计时。如果当调用read函数时还没有任何数据可读,则等接收到第一个字节的数据后,计时器开始计时。函数read可能会在读取到VMIN个字节的数据后返回,也可能在计时完毕后返回,这主要取决于哪个条件首先实现。不过函数至少会读取到一个字节的数据,因为计时器是在读取到第一个数据时开始计时的。
4) 如果VTIME和VMIN都取0,即使读取不到任何数据,函数read也会立即返回。同时,返回值0表示read函数不需要等待文件结束标志就返回了。
这就是这两个变量对read函数的影响。