《OpenCV3编程入门》学习笔记七:图像变换
一:内容介绍
本节主要介绍OpenCV的imgproc模块的图像变换部分:
1. 边缘检测:canny算子,sobel算子,高斯拉普拉斯算子(LOG)
2. 霍夫变换
3. 重映射
4. 仿射变换
5. 直方图均衡化
二:学习笔记
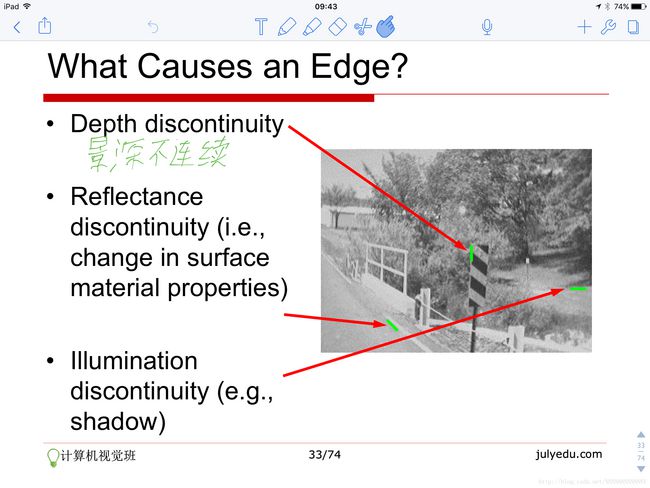
1.造成边缘的原因
景深不连续,反射率不连续(如表面材质的改变),光照不连续(阴影等),如下图
2 . 边缘检测的一般步骤:
滤波(因为导数对噪声比较敏感,一般使用高斯滤波),增强边缘(即将图像像素点邻域强度值有显著变化的点凸显出来,这里可以通过计算梯度幅值来确定),检测(常通过阈值化方法来对这些点进行取舍,这里要用到非极大值抑制啦)。
3. 图像梯度
在计算机视觉中我们常听到图像梯度的概念,这里来介绍一下:

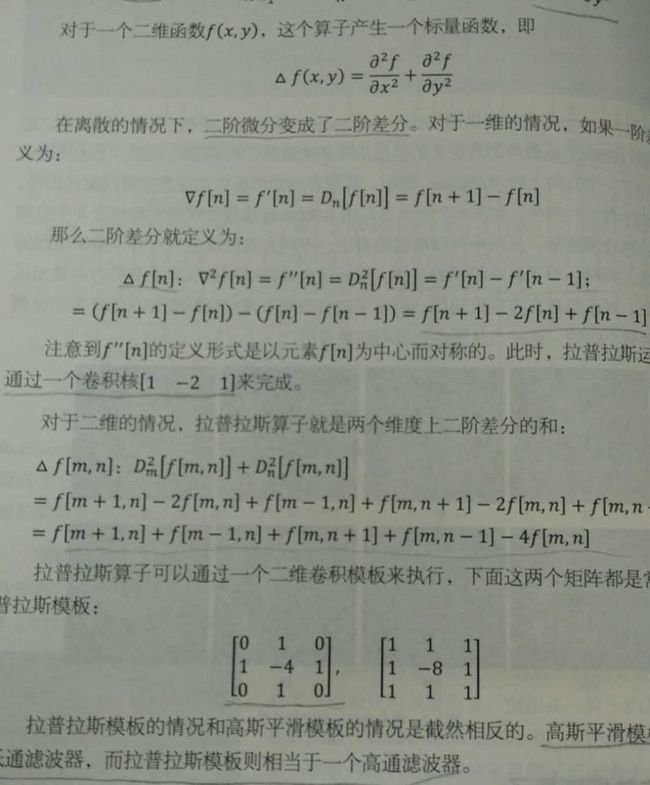
4.拉普拉斯滤波
我们知道高斯平滑是一个低通滤波器,而拉普拉斯则相当于一个高通滤波器,推导如下:
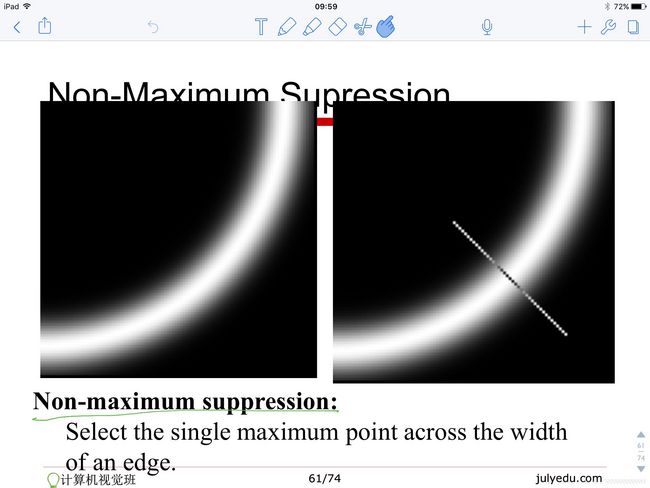
5.非极大值抑制NMS
这个概念应用很广泛,在canny中也有应用,canny算法很经典,务必要搞清楚。
这里给一页slide说明为什么要使用它
6 . 霍夫变换
原理最好自己推一遍,这里需要说明一下hough变换可用于检测任何能写出解析式的简单形状。这里说一下HoughLines()函数,它的输出(rho, theta),rho表示距离原点(图像左上角)的距离,theta表示以y轴反方向为参考的旋转角度。自己写了个demo尝试了一下,结果如下(几条线的交点坐标为(250, 250)):

7 . 关于仿射变换
即y=kx+b。摄像机从不同角度拍摄同一物体即是仿射变换,经过仿射变换原来在同一直线上的点仍然在同一直线上。
8 . 关于直方图均衡化
其中方法CLAHE可参见http://blog.csdn.net/nnnnnnnnnnnny/article/details/52681591
9 . 本节函数清单:

三:相关源码及解析
本章示例较多,示例列表:
1.边缘检测
2.霍夫变换
3.重映射
4.仿射变换
5.直方图均衡化
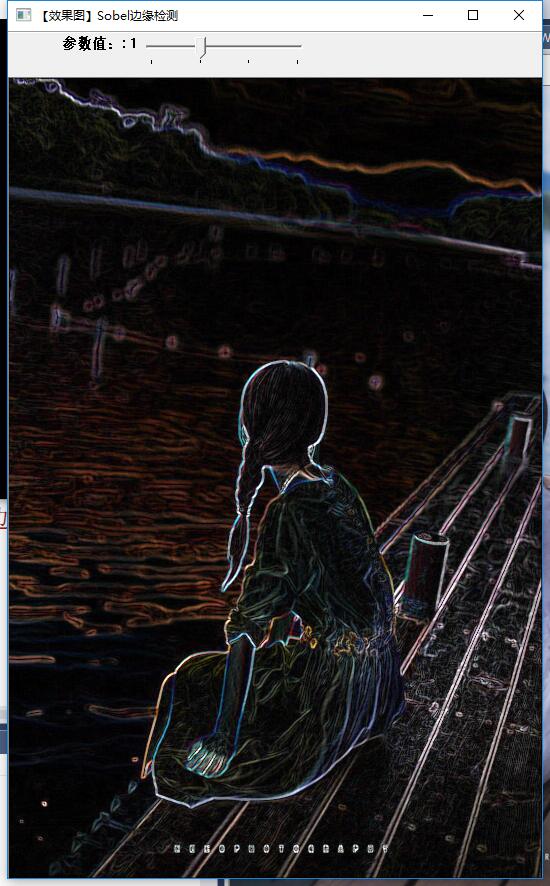
1. 边缘检测
源码:
#include素材:

效果图:

提示:
无
2. 霍夫变换
源码:
#include素材:

效果图:
提示:
无
3. 重映射
源码:
#include0.75 &&
j>g_srcImage.rows*0.25 && j < g_srcImage.rows*0.75) {
g_map_x.at<float>(j, i) = static_cast<float>(2*(i-g_srcImage.cols*0.25) + 0.5);
g_map_y.at<float>(j, i) = static_cast<float>(2 * (j - g_srcImage.rows*0.25) + 0.5);
}
else {
g_map_x.at<float>(j, i) = 0;
g_map_y.at<float>(j, i) = 0;
}
break;
case'2':
g_map_x.at<float>(j, i) = static_cast<float>(i);
g_map_y.at<float>(j, i) = static_cast<float>(g_srcImage.rows-j);
break;
case'3':
g_map_x.at<float>(j, i) = static_cast<float>(g_srcImage.cols-i);
g_map_y.at<float>(j, i) = static_cast<float>(j);
break;
case'4':
g_map_x.at<float>(j, i) = static_cast<float>(g_srcImage.cols - i);
g_map_y.at<float>(j, i) = static_cast<float>(g_srcImage.rows - j);
break;
}
}
}
return 1;
} 素材:

效果图:

提示:
无
4. 仿射变换
源码:
#include素材:

效果图:


提示:
无
5. 直方图均衡化
源码:
#include素材:

效果图:
提示:
无