基于OpenCL的图像积分图算法实现
积分图的概念
图像积分图算法在图像特征检测中有着比较广泛的应用,主要用于规则区域特征值的计算。
积分图的概念可用下图表示:
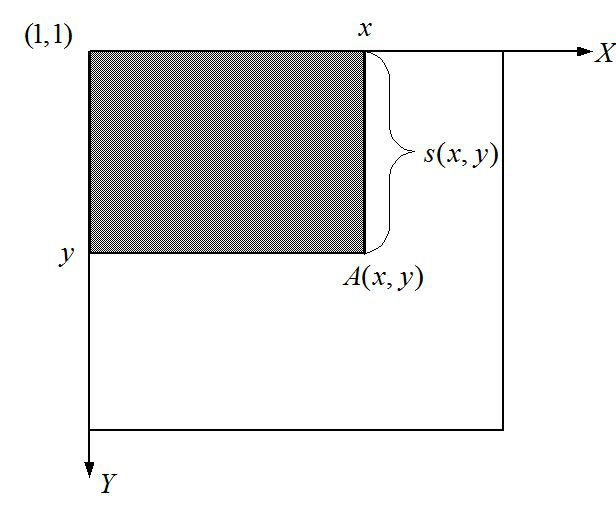
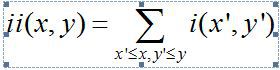
坐标A(x,y)的积分图是其左上角的所有像素之和(图中的阴影部分)。定义为:
在上图中,A(x,y)表示点(x,y)的积分图;s(x,y)表示点(x,y)的y方向的所有原始图像之和。
积分图算法在CPU上的串行实现
在CPU上串行实现积分图计算的典型代码如下:
/* * 标准的积分图算法(cpu) * 返回积分图矩阵对象 * is_square为true时为积方图对象 */
template<typename _E=E
,typename _ENABLE=typename std::enable_if<sizeof(_E)<=sizeof(cl_ulong)>::type>
integral_matrix integral_cpu(bool is_square)const {
throw_if(this->get_row_stride()*this->height!=this->v.size())
auto integ_mat = integral_matrix(this->width,this->height);
// 行宽度
const auto row_stride = this->get_row_stride();
if (!integ_mat.v.size())
integ_mat.v = std::vector前缀和(prefix sum)
说到积分图,就得引入前缀和(prefix sum)的概念:
给定一个数组A[1..n],前缀和数组prefix_sum[1..n]定义为:prefix_sum[i] = A[0]+A1+…+A[i-1];
例如:A[5,6,7,8] –> prefix_sum[5,11,18,26]
prefix_sum[0] =A[0] ;
prefix_sum1 =A[0] + A1 ;
prefix_sum2 =A[0] + A1 + A2 ;
prefix_sum3 =A[0] + A1 + A2 + A3 ;
下面是前缀和数组计算的典型代码,非常简单
/* 前缀和计算模板函数 is_square为true时计算平方和*/
template<typename _T1,typename _T2,
typename _ENABLE=typename std::enable_if<sizeof(_T1)<=sizeof(_T2)>::type>
inline static void prefix_sum(const _T1 *const src,_T2 *const dst,size_t size,bool is_square){
assert(nullptr!=src&&nullptr!=dst);
if(is_square){
dst[0] = src[0]*src[0];
for( size_t i=1; i1];
}
else{
dst[0] = src[0];
for( size_t i=1; i1];
}
} OpenCL并行实现
积分图也可以用下面的公式(2)和公式(3)得出:
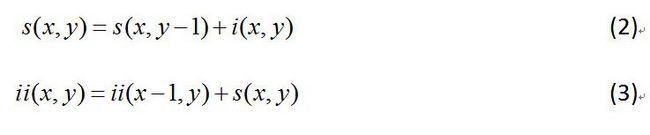
从公式(2)和公式(3)可以看出,积分图的算法类似于前缀和计算(prefix sum)
对于只有一行的像素的图像,它的积分图就是其前缀和数组
所以,如果要用OpenCL并行计算图像矩阵A的积分图,可以把积分图算法分拆成两个步骤:
- 首先计算矩阵A在x方向的前缀和矩阵A1
- 然后再在计算矩阵A1在y方向前缀和矩阵A2,A2就是图像矩阵A的积分图矩阵。
在OpenCL实现中为了提高内存访问性能,计算矩阵A1在y方向前缀和矩阵的时候,通常先将矩阵A1转置,然后再进行计算x方向的前缀和。
所以OpenCL具体实现的时候,分为下面4步
- 计算矩阵A在x方向的前缀和矩阵A1
- A1转置
- 计算矩阵A1在x方向的前缀和矩阵A2
- A2转置
也就是说,基于OpenCL的积分图算法最终被分解为两次x方向前缀和计算和2次矩阵转置
下面是主机端的部分实现代码:
/* * 计算图像的积分图/积方图, * 返回积分图矩阵对象 * is_square为true时为积方图对象 */
gray_matrix_cl::integral_matrix gray_matrix_cl::integral(bool is_square) const {
auto integral_mat1=to_matrix_cl().prefix_sum_line(std::string(KERNEL_NAME(prefix_sum_line)"_uchar_uint"),is_square);//执行kernel,计算x方向前缀和
//原图为灰度图像矩阵,所以原图元素类型为uchar,生成的前缀和矩阵integral_mat1的元素类型为uint
integral_mat1= integral_mat1.transpose(KERNEL_NAME(matrix_transpose)"_uint");//执行kernel,integral_mat1矩阵转置
auto integral_mat2=integral_mat1.prefix_sum_line(std::string(KERNEL_NAME(prefix_sum_line)"_uint_ulong"),false);//执行kernel,计算x方向前缀和
// 源矩阵integral_mat1的元素类型为uint,生成的前缀和矩阵元素类型为ulong
integral_mat2= integral_mat2.transpose(KERNEL_NAME(matrix_transpose)"_ulong");//执行kernel,integral_mat2矩阵转置
return std::move(integral_mat2);//返回积分图对象
}
/* * 计算矩阵中的每一行的前缀和(prefix_sum) * 结果输出到int_mat */
template< typename DST_E,
typename _CL_TYPE=CL_TYPE,typename _E=E,
typename _ENABLE=typename std::enable_if<std::is_scalar<_E>::value
&&std::is_scalar::value
&&sizeof(DST_E)>=sizeof(_E)
&&std::is_base_of::value
>::type>
matrix_cl
prefix_sum_line(const std::string &kernel_name,bool is_square)const{
this->check_cl_mem_obj(SOURCE_AT);
auto context=dynamic_cast<const cl::Memory&>(this->cl_mem_obj).getInfo();
matrix_cl integral_mat(width, height,0,context);
cl::CommandQueue q = cl::CommandQueue(context);
run_kernel(global_facecl_context.getKernel(kernel_name)
, cl::EnqueueArgs(q, { 1, height })//每个work-iteam处理1行
, false
, *this
, integral_mat
, width
, get_row_stride()
, is_square?CL_TRUE:CL_FALSE
);
return std::move(integral_mat);
}
/* * 矩阵转置 */
template<typename _CL_TYPE=CL_TYPE>
typename std::enable_if<std::is_base_of::value,self_type>::type
transpose(const std::string &kernel_name)const{
this->check_cl_mem_obj(SOURCE_AT);
auto context = dynamic_cast<const cl::Memory&>(this->cl_mem_obj).getInfo();
self_type dst_mat(height, width, align_v, context);
dst_mat.align_v = this->align; // 记录转置前的水平对齐值
cl::CommandQueue queue = cl::CommandQueue(context);
run_kernel(global_facecl_context.getKernel(kernel_name)
, cl::EnqueueArgs(queue,{ 1, height })//每个work-iteam处理1行
, false
, *this
, dst_mat
, width
, this->get_row_stride()
, dst_mat.get_row_stride()
);
return std::move(dst_mat);
}
上面代码中用到的run_kernel函数参见我的博客《opencl:cl::make_kernel的进化》
下面是上面代码中执行的kernel函数prefix_sum_line的代码,每个work-item处理一行数据,实现的功能很简单,就是计算矩阵中一行数据的前缀和(prefix sum),
为减少对global内存的访问,kernel函数中用到了local memory(代码中的local_block数组)来暂存每行的部分数据。local_block数组的大小在编译内kernel代码时由编译器提供,参见我的博客《opencl::kernel中获取local memory size》
///////////////////////////////////////////////////////////////////////////////
//! @file : prefix_sum_line.cl
//! @date : 2016/03/04
//! @author: guyadong
//! @brief : Calculates the integral sum scan of an image
////////////////////////////////////////////////////////////////////////////////
#ifndef CL_DEVICE_LOCAL_MEM_SIZE //local memory的大小,由编译器提供
#error not defined CL_DEVICE_LOCAL_MEM_SIZE by complier with options -D
#endif
#ifndef SRC_TYPE //源矩阵数据类型 uchar,uinit,ulong.....
#error not defined SRC_TYPE by complier with options -D
#endif
#ifndef DST_TYPE //目标矩阵数据类型 uchar,uinit,ulong.....
#error not defined DST_TYPE by complier with options -D
#endif
#define LOCAL_BUFFER_SIZE (CL_DEVICE_LOCAL_MEM_SIZE/sizeof(DST_TYPE))//编译时确定local buffer数组的大小
#define _KERNEL_NAME(s,d) prefix_sum_line_##s##_##d
#define KERNEL_NAME(s,d) _KERNEL_NAME(s,d)
// kernel function的名字在编译期根据SRC_TYPE 和DST_TYPE添加类型后缀
///////////////////////////////////////////////////////////////////////////////
//! @brief : Calculates the prefix sum for each line of an image if is_square is CL_FALSE,
// Calculates the prefix sum of is_square if is_square is CL_TRUE,
////////////////////////////////////////////////////////////////////////////////
__kernel void KERNEL_NAME(SRC_TYPE,DST_TYPE)( __global SRC_TYPE *sourceImage, __global DST_TYPE * dest, int width, int width_step,int is_square ){
__local DST_TYPE local_block[ LOCAL_BUFFER_SIZE ];
const int line_index = get_global_id(1)*width_step;// 计算当前行的起始位置
__global SRC_TYPE * const src_ptr = line_index + sourceImage;// 源矩阵的起始指针
__global DST_TYPE * const dst_ptr = line_index + dest; // 目标矩阵的起始指针
__global SRC_TYPE * block_src_ptr = src_ptr;
__global DST_TYPE * block_dst_ptr = dst_ptr;
int block_size = 0; // 块大小
DST_TYPE last_sum=0;// 上一块数组的前缀和
// 将一行数据按local_block数组的大小来分块处理
for( int start_x = 0 ; start_x < width ;
start_x += LOCAL_BUFFER_SIZE,
block_src_ptr += LOCAL_BUFFER_SIZE,
block_dst_ptr += LOCAL_BUFFER_SIZE,
last_sum += local_block[block_size -1] ){
block_size = min( (int)LOCAL_BUFFER_SIZE, width - start_x );
// compute prefix sum of a block with local memory
if(is_square){
local_block[0] = last_sum + ((DST_TYPE)block_src_ptr[0])*((DST_TYPE)block_src_ptr[0]);
for( int i=1; i1];
}else{
local_block[0] = last_sum + (DST_TYPE)block_src_ptr[0];
for( int i=1; i1];
}
// copy local_block to dest
for(int i = 0 ; i < block_size; ++i){
block_dst_ptr[i]=local_block[i];
}
}
}
矩阵转置的kernel代码,每个work-item处理一行数据
///////////////////////////////////////////////////////////////////////////////
//! @file : matrix_transpose.cl
//! @date : 2016/03/04
//! @author: guyadong
//! @brief : matrix transpose
////////////////////////////////////////////////////////////////////////////////
#ifndef SRC_TYPE
#error not defined SRC_TYPE by complier with options -D
#endif
#define _KERNEL_NAME(s) matrix_transpose_##s
#define KERNEL_NAME(s) _KERNEL_NAME(s)
// kernel function的名字在编译期根据SRC_TYPE 加一个类型后缀
__kernel void KERNEL_NAME(SRC_TYPE)( __global SRC_TYPE *matrix_src,__global SRC_TYPE *matrix_dst, int width, int src_width_step,int dst_width_step ){
const int y = get_global_id(1);
__global SRC_TYPE * src_ptr = matrix_src + y*src_width_step;
for( int x = 0; x < width; ++x,++src_ptr ){
matrix_dst[ x*dst_width_step + y ] = *src_ptr;
}
}补充:
后来我对这个算法进行了改进,参见我的后续博文《基于OpenCL的图像积分图算法改进》
参考文章
《AdaBoost人脸检测算法1(转)》
《基于OpenCL的图像积分图算法优化研究》