从线性到非线性模型-Fisher线性判别与线性感知机
从线性到非线性模型
1、线性回归,岭回归,Lasso回归,局部加权线性回归
2、logistic回归,softmax回归,最大熵模型
3、广义线性模型
4、Fisher线性判别和线性感知机
5、三层神经网络
6、支持向量机
四、Fisher线性判别与线性感知机
Fisher线性判别和线性感知机都是针对分类任务,尤其是二分类,二者的共同之处在于都是线性分类器,不同之处在于构建分类器的思想,但是二者有异曲同工之妙。同时二者又可以与logistic回归进行对比,当然logistic回归的理论基础是概率。
一、Fisher线性判别
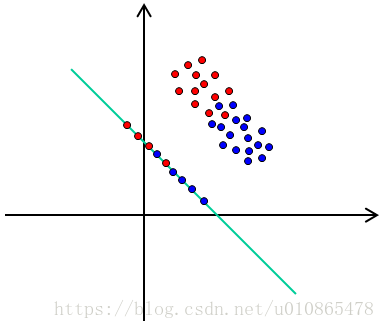
Fisher线性判别是一种线性分类思想,其核心是找一个投影方向将d维数据投影(降维)到一维,使得类内紧致,类间分离。在确定投影方向之后,决策分类器还并未完成,我们还需要分界点来划分不同的类。一般而言很少用Fisher线性判别作为分类模型,更多是借鉴Fisher线性判别的思想来指导降维。
以两类问题来分析:
由类内紧致,类间分离准则确定投影方向,我们可以定义如下类内距离和类间距离
其中 m~i m ~ i 表示降维后的类中心, mi m i 表示原始空间的类中心。
类内距离:
其中 Sw=∑i=1,2xj∈Xi(xj−mi)2 S w = ∑ x j ∈ X i i = 1 , 2 ( x j − m i ) 2 表示每类样本在原始空间的一个类内距离。
类间距离:
其中 Sb=∑i=1,2xj∈Xi(m1−m2)2 S b = ∑ x j ∈ X i i = 1 , 2 ( m 1 − m 2 ) 2 表示每类样本在原始空间的一个类间距离。
所以为了使类内紧致,类间分离,可以最大化如下目标函数:
等价于 max(wTSbw)s.t.wTSww=c max ( w T S b w ) s . t . w T S w w = c ,由拉格朗日乘子法有
可以看出目标函数是关于w的二次凸规划,极值在导数为0处取到,对上式求导有 Sbw∗−λSww∗=0 S b w ∗ − λ S w w ∗ = 0 ,如果 Sw S w 可逆的话,即
也就是说 w w 是 (Sb−λSw) ( S b − λ S w ) 的特征向量。将 Sb=(m1−m2)2 S b = ( m 1 − m 2 ) 2 带入有
又 (m1−mT2)w∗ ( m 1 − m 2 T ) w ∗ 是一个标量,所以 w∗=S−1w(m1−m2) w ∗ = S w − 1 ( m 1 − m 2 ) .
虽然我们确定了投影方向,但是真正的决策函数还是未能确定,一般最简单的做法是直接在一维上找一个阈值直接将两类分开,但是如何确定阈值还需要定义分类的损失函数(类一致性准则)。
比如我们直接采用0-1损失,那么决策界则尽可能多的正确分类样本,另外如果我们采用Logistic回归的对数损失,那么我们的决策边界就不一样。从这个角度来看,线性判别分析和Logistic回归都是将数据映射到一维来进行分类,有没有不用降维直接进行分类的方法,下面就是感知机的分类思想。
二、线性感知机
线性感知机同样是基于线性分类思想,其核心是直接在高维空间找到一个超平面将两类样本尽可能的分开。即,定义点到超平面的距离,在保证线性可分的基础上最小化点到超平面的距离(等价于使得最难分的样本离超平面距离尽可能的大),但由于没有线性可分前提,所以感知机的目标函数是最小化错分样本到超平面的距离之和(线性损失),而分类正确的样本无损失。

首先定义线性超平面:
点到超平面的距离为 1||w||2(w⋅xi+b) 1 | | w | | 2 ( w ⋅ x i + b ) ,即错分的样本到超平面的距离一定为负:
感知机只考虑分类错误的样本,目标函数为最小化错分样本到超平面的距离之和:
其中M为错分样本集合。因为感知机优化的目标是针对错误样本集来不断的调整参数,所以在使用梯度下降算法的时候梯度的计算只依赖于错分的样本。
找到超平面之后我们就可以基于超平面定义决策函数为
再回过头看损失函数,我们发现感知机的损失与Logistic回归的对数损失不一样,感知机采用的损失直接是错误样本的 f(x) f ( x ) 值,而Logistic回归的损失是所有样本的对数损失(当然Logistic回归的 f(x)=sigmoid(x) f ( x ) = s i g m o i d ( x ) )。
感知机的对偶形式
感知机的对偶形式是logistic回归一致,同SVM对偶形式推导一致
可以说神经网络和SVM都是线性感知机的一种延伸,神经网络是引入非线性激活函数,而SVM则是使用核函数,SVM同时提出了软间隔分类。虽然说神经网络是从感知机过来的,但是神经网络引入非线性激活函数后,不仅失去了解释性,也使其与感知机渐行渐远,笔者倒是觉得SVM更像感知机,不仅提升了精度,同时保留了很好的解释性。