【统计学习方法by李航】第二章 感知机 个人总结
第二章 感知机
- 一、感知机模型[2.1]
- (一)定义2.1
- (二)几何解释
- 二、感知机学习策略[2.2]
- (一)数据集的线性可分型[2.2.1]
- (二)感知机学习策略[2.2.2]
- 1、把点到直线距离公式摆上来,代入超平面方程
- 2、为了去掉绝对值,我们现在看看误分类数据有什么特点
- 3、推广到多个点
- (三)损失函数特性
- 三、感知机学习算法[2.3]
- (一)感知机学习算法的原始形式[2.3.1]
- 1、梯度下降法的几何解释:通过 *不断的运算*,使点向 *极小值* 逼近。
- 2、梯度下降法的具体算法【本章重点】
- 3、梯度下降法的其他解释
- 4、例2.1(略),通过梯度下降法的具体算法很容易理解
- (二)算法的收敛性[2.3.2](算法收敛的证明)(尽量简化通俗了)
- 1、对于(1)书中的证明
- 2、对于(2)书中的证明(含解释)
- 分步证明1
- 分步证明2
- 分步证明3
- 分步证明4
- (三)感知机学习算法的对偶(等效)形式[2.3.3]
- 补充,书中的Gram矩阵
链接:[ 全文章目录 ]
一、感知机模型[2.1]
超平面:
输入空间是n维向量,那么超空间就是(n-1)维向量
【键盘字母上面的数字1到0(10个不同的变量),如果想把它们分割开,需要有(10-1)个隔板(9个超空间)】
分离超平面(将n整合为2的超平面):
在一个平面中划一条线,使平面中的样本尽可能的分为正负两类。(一般判断是或不是)
(一)定义2.1
简单定义:【感知机就是 求出分离超平面,再 通过分离超平面来进行二分类 的一种模型。】
具体定义:
![]()

w∊Rn:叫作权值或权值向量
b∊R :叫作偏置
w·x表示w和x的内积(就是点积)
!注意,w和x都是长度为n的向量
感知机是一种 线性分类模型 ,属于 判别模型 。
感知机模型的假设空间是定义在特征空间中的 所有线性分类模型 或 线性分类器 ,
即函数集合 { f | f(x)=w·x+b } 。
(二)几何解释
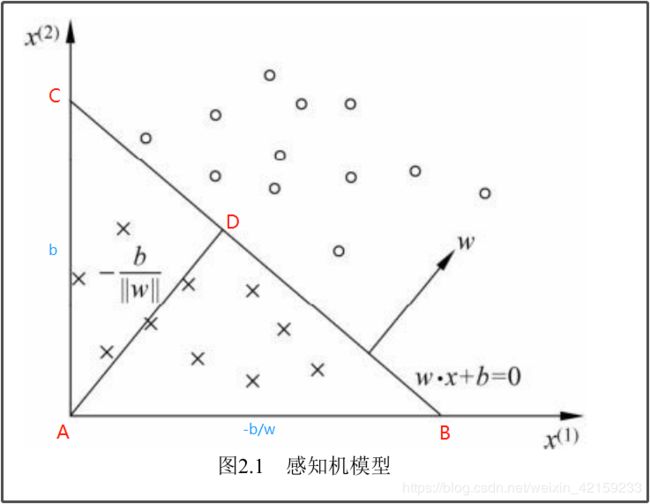
||w||:向量w的2范数是w中各个元素平方之和再开根号,就是向量的模(长度) ;
AD算出来是: − b 1 + w 2 -\frac{b}{\sqrt{1+w^2}} −1+w2b
怎么变成: − b ∣ ∣ w ∣ ∣ -\frac{b}{||w||} −∣∣w∣∣b 也就是 − b w 2 -\frac{b}{\sqrt{w^2}} −w2b 的不是很清楚
二、感知机学习策略[2.2]
(一)数据集的线性可分型[2.2.1]
能用一条线 完全的 分割为两种类型,就称数据集有线性可分型。(不能有一类的某个点跑到另一类里面)
(二)感知机学习策略[2.2.2]
定义(经验)损失函数并将损失函数 极小化 ,求出w、b。
这里的损失函数为:误分类点到超平面(那条线)S的总距离。
具体推倒:
1、把点到直线距离公式摆上来,代入超平面方程
距离 d = ∣ A x i + B y i + C ∣ A 2 + B 2 d=\frac{|Ax_i + By_i + C|}{\sqrt{A^2 + B^2}} d=A2+B2∣Axi+Byi+C∣
已知超平面方程为:w·x+b=0,代入上式,得:
距离 d = ∣ w x i + b ∣ w 2 = ∣ w x i + b ∣ ∣ ∣ w ∣ ∣ d=\frac{|wx_i + b|}{\sqrt{w^2}}=\frac{|wx_i + b|}{||w||} d=w2∣wxi+b∣=∣∣w∣∣∣wxi+b∣
2、为了去掉绝对值,我们现在看看误分类数据有什么特点
已知有个误分类的数据(xi, yi)
因为它误分类了,所以当:
(1)w·xi+b>0,即被分类为正类时,它的原分类yi必为-1(负类)
(2)w·xi+b<0,即被分类为负类时,它的原分类yi必为+1(正类)
那么对误分类的数据必有: y i ( w ⋅ x i + b ) < 0 y_i(w·x_i+b)<0 yi(w⋅xi+b)<0
而距离是正数,所以在前面加上负号,变成: d = − y i ( w x i + b ) ∣ ∣ w ∣ ∣ d=-\frac{y_i(wx_i + b)}{||w||} d=−∣∣w∣∣yi(wxi+b)
【乘上一个 “-yi” 就可以把绝对值去掉,还可以筛出误分类的数据(正确分类的距离必为负值)】
3、推广到多个点
M为误分类点的集合
(1)总距离为: − 1 ∣ ∣ w ∣ ∣ ∑ x i ϵ M y i ( w ⋅ x + b ) -\frac{1}{||w||}\sum_{x_i\epsilon M}y_i(w·x+b) −∣∣w∣∣1xiϵM∑yi(w⋅x+b)
(2)因为w是超平面的法向量,与大小无关,而 1 ∣ ∣ w ∣ ∣ \frac{1}{||w||} ∣∣w∣∣1是一个标量,所以可以忽略 1 ∣ ∣ w ∣ ∣ \frac{1}{||w||} ∣∣w∣∣1
(3)得到感知机学习的损失函数(经验风险函数): L ( w , b ) = − ∑ x i ϵ M y i ( w ⋅ x + b ) L(w,b)=-\sum_{x_i\epsilon M}y_i(w·x+b) L(w,b)=−xiϵM∑yi(w⋅x+b)
(三)损失函数特性
1、非负(距离)
2、正确分类时值为0
3、损失函数是连续可导函数:在误分类时,它是线性函数;正确分类时它是常数函数。
三、感知机学习算法[2.3]
(一)感知机学习算法的原始形式[2.3.1]
通过 梯度下降法 求损失函数的极小值: m i n w , b L ( w , b ) = − ∑ x i ϵ M y i ( w ⋅ x + b ) ( 2.5 ) min_{w,b}\quad L(w,b)=-\sum_{x_i\epsilon M}y_i(w·x+b) \qquad\qquad(2.5) minw,bL(w,b)=−xiϵM∑yi(w⋅x+b)(2.5)
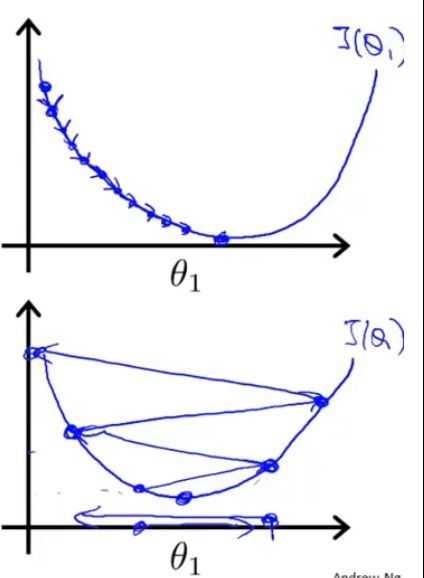
1、梯度下降法的几何解释:通过 不断的运算,使点向 极小值 逼近。
2、梯度下降法的具体算法【本章重点】
损失函数的梯度: ( 由 2.5 对 w 求 偏 导 ) ▽ w L ( w , b ) = − ∑ x i ϵ M y i x i (由2.5对w求偏导)\bigtriangledown_wL(w,b)=-\sum_{x_i\epsilon M}y_ix_i (由2.5对w求偏导)▽wL(w,b)=−xiϵM∑yixi ( 由 2.5 对 b 求 偏 导 ) ▽ b L ( w , b ) = − ∑ x i ϵ M y i (由2.5对b求偏导)\bigtriangledown_bL(w,b)=-\sum_{x_i\epsilon M}y_i (由2.5对b求偏导)▽bL(w,b)=−xiϵM∑yi
(1)任取一个超平面(任取w,b)
(2)得到误分类点的集合M
(3)遍历误分类点求梯度对w,b进行更新: w ← w + η y i x i w \gets w+\eta y_ix_i w←w+ηyixi b ← b + η y i b \gets b+\eta y_i b←b+ηyi
(4)直到L(w,b)=0
η \eta η(0< η \eta η<=1)是步长,又称学习率,用来控制梯度大小。
(在吴恩达的machine learning中,学习率用的是 θ \theta θ )
3、梯度下降法的其他解释
当一个实例点被误分类,即位于分离超平面的错误一侧时,则调整w,b的值,使分离超平面向该误分类点的一侧移动,以减少该误分类点与超平面间的距离,直至超平面越过该误分类点使其被正确分类。
4、例2.1(略),通过梯度下降法的具体算法很容易理解
(二)算法的收敛性[2.3.2](算法收敛的证明)(尽量简化通俗了)
这里证明经过 有限次迭代 可以得到一个将训练数据集 完全正确划分 的分离超平面及感知机模型。
为了便于叙述与推导,
将偏置b并入权重向量w,记作: w ^ \hat{w} w^=(wT,b)T,
同样也将输入向量加以扩充,加进常数1,记作: x ^ \hat{x} x^=(xT,1)T 。
这样, w ^ \hat{w} w^∊R N+1 , x ^ \hat{x} x^∊R N+1 。 显然, w ^ \hat{w} w^· x ^ \hat{x} x^=w·x+b。
结论:

1、对于(1)书中的证明
(1)由于训练数据集是线性可分的,存在超平面可将训练数据集完全正确分开,
取此超平面为 w ^ o p t ⋅ x ^ = w o p t ⋅ x + b o p t = 0 \hat{w}_{opt}·\hat{x}=w_{opt}·x+b_{opt}=0 w^opt⋅x^=wopt⋅x+bopt=0,使 ∣ ∣ w ^ o p t ∣ ∣ = 1 ||\hat{w}_{opt}||=1 ∣∣w^opt∣∣=1。由于对有限的i=1,2,…,N,均有: y i ( w ^ o p t ⋅ x i ^ ) = y i ( w o p t ⋅ x + b o p t ) > 0 y_i(\hat{w}_{opt}·\hat{x_i})=y_i(w_{opt}·x+b_{opt})>0 yi(w^opt⋅xi^)=yi(wopt⋅x+bopt)>0
所以存在 γ = m i n i { y i ( w o p t ⋅ x + b o p t ) } \gamma=min_i \{y_i(w_{opt}·x+b_{opt})\} γ=mini{yi(wopt⋅x+bopt)}
使
∗ ∗ ∗ ∗ ∗ ∗ y i ( w ^ o p t ⋅ x i ^ ) = y i ( w o p t ⋅ x + b o p t ) ≥ γ ( 公 式 1 ) ∗ ∗ ∗ ∗ ∗ ∗ ******y_i(\hat{w}_{opt}·\hat{x_i})=y_i(w_{opt}·x+b_{opt})\ge\gamma\qquad(公式1)****** ∗∗∗∗∗∗yi(w^opt⋅xi^)=yi(wopt⋅x+bopt)≥γ(公式1)∗∗∗∗∗∗
(2)解释
- w ^ o p t \hat{w}_{opt} w^opt、wopt、bopt的下标opt的意思是:【对任意可选的】 w ^ \hat{w} w^、w、b。只要满足式子即可。
- ∣ ∣ w ^ o p t ∣ ∣ = 1 ||\hat{w}_{opt}||=1 ∣∣w^opt∣∣=1,原因: w ^ o p t \hat{w}_{opt} w^opt可以乘上任意常数使公式1都成立,所以,为了特殊化,使 w ^ o p t \hat{w}_{opt} w^opt为单位长度,一般是 ∣ ∣ w ^ o p t ∣ ∣ = 1 ||\hat{w}_{opt}||=1 ∣∣w^opt∣∣=1
- γ 就 是 一 个 大 于 0 的 数 , 没 啥 意 义 \gamma就是一个大于0的数,没啥意义 γ就是一个大于0的数,没啥意义
2、对于(2)书中的证明(含解释)
感知机算法从 w ^ 0 = 0 \hat{w}_0=0 w^0=0 (方便后面推导) 开始,如果实例被误分类,则更新权重。
分步证明每一步最终都会得到一个公式,最后进行合并得到推论
分步证明1
(1) 令 k-1 是第k个误分类实例之前的扩充权重向量(就是 w ^ \hat{w} w^在右下角加了个k-1的下标),即
w ^ k − 1 = ( w k − 1 T , b k − 1 ) T \hat{w}_{k-1} = (w^T_{k-1},b_{k-1})^T w^k−1=(wk−1T,bk−1)T
(2) 则第k个误分类实例的前提条件(第k次更新前的损失函数)是【这里是把上面的 w k − 1 w_{k-1} wk−1和 b k − 1 b_{k-1} bk−1代入了损失函数】
y i ( w ^ k − 1 ⋅ x ^ i ) = y i ( w k − 1 ⋅ x i + b k − 1 ) ≤ 0 y_i(\hat{w}_{k-1}·\hat{x}_i)=y_i(w_{k-1}·x_i+b_{k-1})\le0 yi(w^k−1⋅x^i)=yi(wk−1⋅xi+bk−1)≤0
小于0上面有推导,等于0是因为存在没有误分类的情况
(3) 若(xi,yi)是被 w ^ k − 1 = ( w k − 1 T , b k − 1 ) T \hat{w}_{k-1} = (w^T_{k-1},b_{k-1})^T w^k−1=(wk−1T,bk−1)T误分类的数据,则w和b的更新是
w k ← w k − 1 + η y i x i w_k \gets w_{k-1}+\eta y_ix_i wk←wk−1+ηyixi b k ← b k − 1 + η y i b _k\gets b_{k-1}+\eta y_i bk←bk−1+ηyi
【就是w和b的更新公式加了个下标】
根据上面的两个更新公式化简得:
∗ ∗ ∗ ∗ ∗ ∗ w ^ k = w ^ k − 1 + η y i x ^ i ( 公 式 2 ) ∗ ∗ ∗ ∗ ∗ ∗ ******\hat{w}_k=\hat{w}_{k-1}+\eta y_i\hat{x}_i\qquad(公式2)****** ∗∗∗∗∗∗w^k=w^k−1+ηyix^i(公式2)∗∗∗∗∗∗
化简过程如下
w ^ k = ( w k T , b k ) T = w k + b k = w k − 1 + η y i x i + b k − 1 + η y i = [ w k − 1 + b k − 1 ] + [ η y i ( x i + 1 ) ] = w ^ k − 1 + η y i x ^ i \hat{w}_k=(w^T_k,b_k)^T=w_k+b_k\\=w_{k-1}+\eta y_ix_i+b_{k-1}+\eta y_i\\=[w_{k-1}+b_{k-1}]+[\eta y_i(x_i+1)]\\=\hat{w}_{k-1}+\eta y_i\hat{x}_i w^k=(wkT,bk)T=wk+bk=wk−1+ηyixi+bk−1+ηyi=[wk−1+bk−1]+[ηyi(xi+1)]=w^k−1+ηyix^i
分步证明2
(4) 由公式2 w ^ k = w ^ k − 1 + η y i x ^ i \hat{w}_k=\hat{w}_{k-1}+\eta y_i\hat{x}_i w^k=w^k−1+ηyix^i
可以求出: w ^ k ⋅ w ^ o p t = w ^ k − 1 ⋅ w ^ o p t + η [ y i x ^ i ⋅ w ^ o p t ] \hat{w}_k·\hat{w}_{opt}=\hat{w}_{k-1}·\hat{w}_{opt}+\eta [y_i\hat{x}_i·\hat{w}_{opt}] w^k⋅w^opt=w^k−1⋅w^opt+η[yix^i⋅w^opt]
(5)
由公式1(的一部分) y i ( w ^ o p t ⋅ x i ^ ) ≥ γ y_i(\hat{w}_{opt}·\hat{x_i})\ge\gamma yi(w^opt⋅xi^)≥γ
我们就可以把上面(4)式子里面方括号的东西换掉:
w ^ k − 1 ⋅ w ^ o p t + η [ y i x ^ i ⋅ w ^ o p t ] ≥ w ^ k − 1 ⋅ w ^ o p t + η γ \hat{w}_{k-1}·\hat{w}_{opt}+\eta [y_i\hat{x}_i·\hat{w}_{opt}]\quad\ge\quad\hat{w}_{k-1}·\hat{w}_{opt}+\eta \gamma w^k−1⋅w^opt+η[yix^i⋅w^opt]≥w^k−1⋅w^opt+ηγ
(6) 我们把(5)中不等式的右边推广一下,得到( η \eta η和 γ \gamma γ都是正的):
左 边 ≥ w ^ k − 1 ⋅ w ^ o p t + η γ ≥ w ^ k − 2 ⋅ w ^ o p t + 2 ⋅ η γ ≥ ⋅ ⋅ ⋅ ≥ w ^ 0 ⋅ w ^ o p t + k ⋅ η γ 左边\ge\hat{w}_{k-1}·\hat{w}_{opt}+\eta \gamma\ge\hat{w}_{k-2}·\hat{w}_{opt}+2·\eta \gamma\ge···\ge\hat{w}_{0}·\hat{w}_{opt}+k·\eta \gamma 左边≥w^k−1⋅w^opt+ηγ≥w^k−2⋅w^opt+2⋅ηγ≥⋅⋅⋅≥w^0⋅w^opt+k⋅ηγ
这里 k > = 1 , k ϵ N + k>=1,k\epsilon N^+ k>=1,kϵN+(k是大于等于1的正整数)
由(4)和(5)整理得: w ^ k ⋅ w ^ o p t ≥ w ^ 0 ⋅ w ^ o p t + k ⋅ η γ = k ⋅ η γ ( w ^ 0 = 0 ) \hat{w}_k·\hat{w}_{opt}\ge\hat{w}_{0}·\hat{w}_{opt}+k·\eta \gamma= k·\eta \gamma(\hat{w}_{0}=0) w^k⋅w^opt≥w^0⋅w^opt+k⋅ηγ=k⋅ηγ(w^0=0)
得到
∗ ∗ ∗ ∗ ∗ ∗ w ^ k ⋅ w ^ o p t ≥ k ⋅ η γ ( 公 式 3 ) ∗ ∗ ∗ ∗ ∗ ∗ ******\hat{w}_k·\hat{w}_{opt}\ge k·\eta \gamma\qquad(公式3)****** ∗∗∗∗∗∗w^k⋅w^opt≥k⋅ηγ(公式3)∗∗∗∗∗∗
分步证明3
(7) 由分步证明1得出的公式2 “ w ^ k = w ^ k − 1 + η y i x ^ i \hat{w}_k=\hat{w}_{k-1}+\eta y_i\hat{x}_i w^k=w^k−1+ηyix^i ”,等式两边平方得:
∣ ∣ w ^ k ∣ ∣ 2 = ∣ ∣ w ^ k − 1 ∣ ∣ 2 + 2 ⋅ w ^ k − 1 ⋅ η y i x ^ i + η 2 y i 2 ∣ ∣ x ^ i ∣ ∣ 2 ||\hat{w}_k||^2=||\hat{w}_{k-1}||^2+2·\hat{w}_{k-1}·\eta y_i\hat{x}_i+\eta^2 y_i^2||\hat{x}_i||^2 ∣∣w^k∣∣2=∣∣w^k−1∣∣2+2⋅w^k−1⋅ηyix^i+η2yi2∣∣x^i∣∣2
因为yi取正负1,所以 y i 2 = 1 y_i^2=1 yi2=1,就变成了书中的式子(最后那项少了 y i 2 y_i^2 yi2):
∣ ∣ w ^ k ∣ ∣ 2 = ∣ ∣ w ^ k − 1 ∣ ∣ 2 + 2 ⋅ w ^ k − 1 ⋅ η y i x ^ i + η 2 ∣ ∣ x ^ i ∣ ∣ 2 ||\hat{w}_k||^2=||\hat{w}_{k-1}||^2+2·\hat{w}_{k-1}·\eta y_i\hat{x}_i+\eta^2 ||\hat{x}_i||^2 ∣∣w^k∣∣2=∣∣w^k−1∣∣2+2⋅w^k−1⋅ηyix^i+η2∣∣x^i∣∣2
(8) 由分步证明1的(2)中式子 “ y i ( w ^ o p t ⋅ x i ^ ) ≤ 0 y_i(\hat{w}_{opt}·\hat{x_i})\le0 yi(w^opt⋅xi^)≤0 ”;再由于“步进 η \eta η”必大于0
所以(7)最后式子中的 2 ⋅ w ^ k − 1 ⋅ η y i x ^ i ( 必 定 小 于 等 于 0 ) 2·\hat{w}_{k-1}·\eta y_i\hat{x}_i(必定小于等于0) 2⋅w^k−1⋅ηyix^i(必定小于等于0)
即有: ∣ ∣ w ^ k − 1 ∣ ∣ 2 + 2 ⋅ w ^ k − 1 ⋅ η y i x ^ i + η 2 ∣ ∣ x ^ i ∣ ∣ 2 ≤ ∣ ∣ w ^ k − 1 ∣ ∣ 2 + η 2 ∣ ∣ x ^ i ∣ ∣ 2 ||\hat{w}_{k-1}||^2+2·\hat{w}_{k-1}·\eta y_i\hat{x}_i+\eta^2 ||\hat{x}_i||^2\le||\hat{w}_{k-1}||^2+\eta^2 ||\hat{x}_i||^2 ∣∣w^k−1∣∣2+2⋅w^k−1⋅ηyix^i+η2∣∣x^i∣∣2≤∣∣w^k−1∣∣2+η2∣∣x^i∣∣2
(9) 最后,将 ∣ ∣ x ^ i ∣ ∣ ||\hat{x}_i|| ∣∣x^i∣∣看作是R的下限,得到:
∣ ∣ w ^ k − 1 ∣ ∣ 2 + 2 ⋅ w ^ k − 1 ⋅ η y i x ^ i + η 2 ∣ ∣ x ^ i ∣ ∣ 2 ≤ ∣ ∣ w ^ k − 1 ∣ ∣ 2 + η 2 ∣ ∣ x ^ i ∣ ∣ 2 ≤ ∣ ∣ w ^ k − 1 ∣ ∣ 2 + η 2 R 2 ||\hat{w}_{k-1}||^2+2·\hat{w}_{k-1}·\eta y_i\hat{x}_i+\eta^2 ||\hat{x}_i||^2\le||\hat{w}_{k-1}||^2+\eta^2 ||\hat{x}_i||^2\le||\hat{w}_{k-1}||^2+\eta^2 R^2 ∣∣w^k−1∣∣2+2⋅w^k−1⋅ηyix^i+η2∣∣x^i∣∣2≤∣∣w^k−1∣∣2+η2∣∣x^i∣∣2≤∣∣w^k−1∣∣2+η2R2
仿造分步证明2(6)中的推广,得到
∣ ∣ w ^ k − 1 ∣ ∣ 2 + η 2 R 2 ≤ ∣ ∣ w ^ 0 ∣ ∣ 2 + k ⋅ η 2 R 2 ||\hat{w}_{k-1}||^2+\eta^2 R^2\le||\hat{w}_{0}||^2+k·\eta^2 R^2 ∣∣w^k−1∣∣2+η2R2≤∣∣w^0∣∣2+k⋅η2R2
最后,整理(7)(9)得:
∗ ∗ ∗ ∗ ∗ ∗ ∣ ∣ w ^ k ∣ ∣ 2 ≤ k η 2 R 2 ( 公 式 4 ) ∗ ∗ ∗ ∗ ∗ ∗ ******||\hat{w}_k||^2\le k\eta^2 R^2\qquad(公式4)****** ∗∗∗∗∗∗∣∣w^k∣∣2≤kη2R2(公式4)∗∗∗∗∗∗
分步证明4
由公式3 “ w ^ k ⋅ w ^ o p t ≥ k ⋅ η γ \hat{w}_k·\hat{w}_{opt}\ge k·\eta \gamma w^k⋅w^opt≥k⋅ηγ ”,
和公式4 “ ∣ ∣ w ^ k ∣ ∣ 2 ≤ k η 2 R 2 ||\hat{w}_k||^2\le k\eta^2 R^2 ∣∣w^k∣∣2≤kη2R2 ”,得:
k η γ ≤ w ^ k ⋅ w ^ o p t ≤ ∣ ∣ w ^ k ∣ ∣ ⋅ ∣ ∣ w ^ o p t ∣ ∣ ≤ k η R ( ∣ ∣ w ^ o p t ∣ ∣ = 1 , 左 边 用 公 式 3 , 右 边 用 公 式 4 ) k\eta\gamma \le \hat{w}_k·\hat{w}_{opt} \le ||\hat{w}_k||·||\hat{w}_{opt}|| \le \sqrt{k}\eta R(||\hat{w}_{opt}||=1,左边用公式3,右边用公式4) kηγ≤w^k⋅w^opt≤∣∣w^k∣∣⋅∣∣w^opt∣∣≤kηR(∣∣w^opt∣∣=1,左边用公式3,右边用公式4)
由不等式最左边与最右边 “ k η γ ≤ k η R k\eta\gamma \le \sqrt{k}\eta R kηγ≤kηR ” 两边同时平方化简得:
k 2 γ ≤ k R 2 k^2\gamma \le kR^2 k2γ≤kR2
移下字母得:
∗ ∗ ∗ ∗ ∗ ∗ k ≤ ( R γ ) 2 ( 证 毕 ) ∗ ∗ ∗ ∗ ∗ ∗ ******k\le(\frac{R}{\gamma})^2\qquad(证毕)****** ∗∗∗∗∗∗k≤(γR)2(证毕)∗∗∗∗∗∗
定理表明,误分类的次数k是有上界的,经过有限次搜索可以找到将训练数据完全正确分开的分离超平面。
当训练集线性不可分时,感知机学习算法不收敛,迭代结果会发生震荡。
*公式3和公式4的意义:
公式3: w ^ k ⋅ w ^ o p t ≥ k ⋅ η γ \hat{w}_k·\hat{w}_{opt}\ge k·\eta \gamma w^k⋅w^opt≥k⋅ηγ ,说明 w ^ k \hat{w}_k w^k 随k的变大,下界变大
公式4 “ ∣ ∣ w ^ k ∣ ∣ 2 ≤ k η 2 R 2 ||\hat{w}_k||^2\le k\eta^2 R^2 ∣∣w^k∣∣2≤kη2R2 ”,说明 w ^ k \hat{w}_k w^k的绝对值有上界
公式3+公式4的几何意义, w ^ k \hat{w}_k w^k向量通过旋转越来越接近 w ^ o p t \hat{w}_{opt} w^opt向量
(三)感知机学习算法的对偶(等效)形式[2.3.3]
对偶形式对于原始形式最大的不同在于,对偶形式多给了 不同的点不同权重 ,而且对于计算机来说,计算量更小。
(因为在超平面附近的点是最容易误分类的,所以给这些点高权重,可以更快收敛)
在原始形式中:
w ← w + η y i x i b ← b + η y i w \gets w+ \eta y_ix_i\\ b\gets b+\eta y_i w←w+ηyixib←b+ηyi
那么把上面的递推式子整合(对全部的n个点),得到:
w = ∑ i = 1 N α i y i x i b = ∑ i = 1 N α i y i w = \sum_{i=1}^{N} \alpha_iy_ix_i \\ b=\sum_{i=1}^{N}\alpha_iy_i w=i=1∑Nαiyixib=i=1∑Nαiyi
上式中的 “ α i = n i η \alpha_i=n_i\eta αi=niη” ,
η \eta η是递推式子中本来就有的,
n i n_i ni其实就是个计数(出现几次就是几)的变量,那个点出现的次数越多,就代表着那个点离超平面越近, n i n_i ni代表的权重越大。
这里把原始形式的经验损失函数摆上来: L ( w , b ) = − ∑ x i ϵ M y i ( w ⋅ x + b ) ≥ 0 L(w,b)=-\sum_{x_i\epsilon M}y_i(w·x+b)\ge0 L(w,b)=−xiϵM∑yi(w⋅x+b)≥0
把上面w的整合式代入,得: − ∑ x i ϵ M y i ( ∑ i = 1 N α i y i x i ⋅ x + b ) ≥ 0 -\sum_{x_i\epsilon M}y_i(\sum_{i=1}^{N} \alpha_iy_ix_i·x+b)\ge0 −xiϵM∑yi(i=1∑Nαiyixi⋅x+b)≥0
去负号: ∑ x i ϵ M y i ( ∑ i = 1 N α i y i x i ⋅ x + b ) ≤ 0 \sum_{x_i\epsilon M}y_i(\sum_{i=1}^{N} \alpha_iy_ix_i·x+b)\le0 xiϵM∑yi(i=1∑Nαiyixi⋅x+b)≤0
这时,在原始形式中更新w和b,就变成了更新 α i \alpha_i αi和b,即:
α i ← α i + η ( 就 是 计 数 器 的 意 思 ) b ← b + η y i \alpha_i \gets \alpha_i+\eta(就是计数器的意思)\\ b\gets b+\eta y_i αi←αi+η(就是计数器的意思)b←b+ηyi
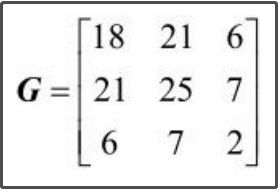
补充,书中的Gram矩阵
Gram矩阵,用来储存不同向量的内积
比如有x1,x2,x3,三个向量,那么Gram矩阵表示为
| x1·x1 | x1·x2 | x1·x3 |
|---|---|---|
| x2·x1 | x2·x2 | x2·x3 |
| x3·x1 | x3·x2 | x3·x3 |
例子:x1=(3,3)T,x2=(4,3)T,x3=(1,1)T,它们生成的Gram矩阵为:
第二章结束… …
链接:[ 全文章目录 ]