- 在VScode设置R语言
weixin_39287540
Rwindowsmac
在VScode设置R语言1.下载R语言和VScode2.安装所需要的插件3.下载对接RLSP的R包3.下载Radian4.设置VScode中的路径1.下载R语言和VScodeR语言官网:https://www.r-project.orgVScode官网:https://code.visualstudio.com/2.安装所需要的插件必须的插件有2个:R和RLSPClient3.下载对接RLSP的R
- Java的DatagramPacket在C#中体现
hh_fine
c#java
C#创建UDP客户端和服务端在C#中,DatagramPacket是Java中用于UDP通信的一个类,而C#并没有直接对应的DatagramPacket类。不过,C#提供了类似的机制来处理基于UDP的数据报(datagram)通信,主要通过System.Net.Sockets命名空间中的UdpClient和Socket类来实现使用UDP客户端发送UdpClient是相对于Socket更高级的类,适
- golang httpClient请求,时不时EOF,怎么解决?
Ai 编码
Golang教程golangxcode开发语言
在使用Go的http.Client进行HTTP请求时,有时会遇到EOF错误。这个错误通常与网络连接问题或HTTP客户端的使用方式不当有关。下面我将详细解释一些常见原因以及解决方法。常见原因连接被意外关闭:EOF错误的意思是"EndOfFile",在HTTP请求中通常表示连接被提前关闭。可能是服务端关闭了连接,也可能是客户端的连接池管理不当导致的。HTTP连接复用(Keep-Alive)问题:Go的
- PCL 点云按时间进行渲染赋色【2025最新版】
点云侠
PCL学习自动驾驶c++3d计算机视觉
目录一、可视化渲染二、代码实现三、结果展示四、保存渲染结果博客长期更新,本文最近更新时间为:2025年1月18日。一、可视化渲染 首先根据自定义的点类型从含有时间索引的las点云数据中提取时间,然后根据时间进行渲染。二、代码实现#include#include"MyPointCloud.h"
- Nacos1.4源码-服务注册
CocoaAndYy
java
Nacos1.4使用的都是http通信,nacos2.0之后改为使用grpc通信。涉及到的核心方法:异步队列+写时复制(copyOnWrite)1.客户端启动流程1.验证服务实例NacosNamingService(核心类)2.用post调用http请求,注册实例(客户端向服务端发起请求,注册!)/nacos/v1/ns/instance(调用jdkHttpClient发起请求)客户端启动流程:A
- 解决pcl_viewer运行报错
Meteor的笔记
在运行pcl_viewer时报了一个类似错误,说GLIBCXX_3.4.26找不到。后来参考这篇文章解决问题参考
- pcl用PCLVisualizer可视化ply数据,显示界面卡死问题
worldcloud
pcl用PCLVisualizer可视化ply数据,显示界面卡死问题在addPointCloud后面加一句viwer->spin();
- PCL 基于法线微分(DoN)的点云分割【2025最新版】
点云侠
PCL学习算法可视化聚类c++开发语言计算机视觉3d
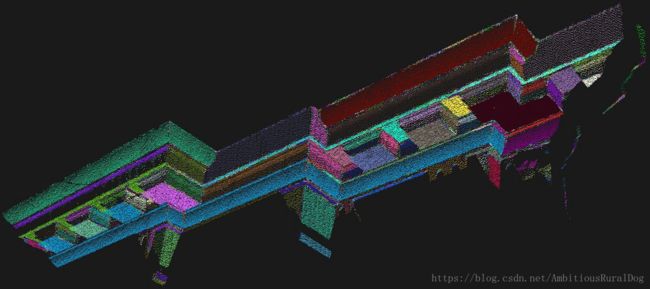
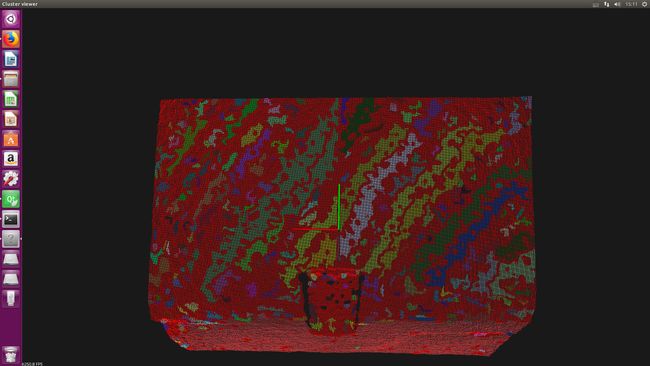
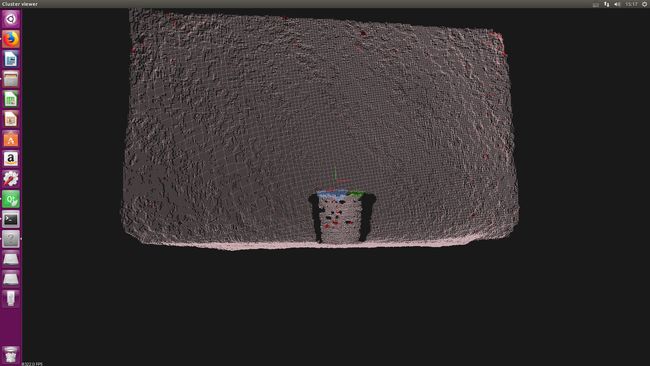
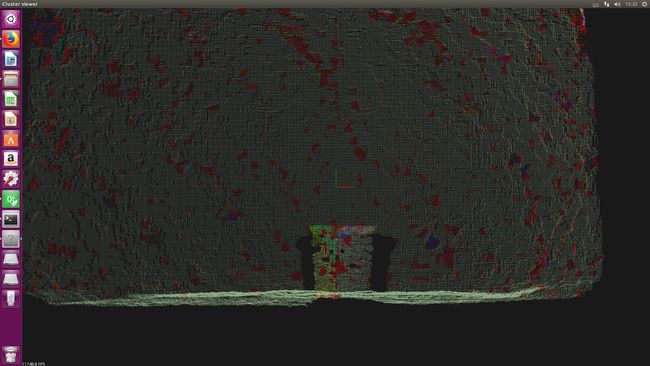
法线微分一、算法原理1、DoN定义2、DoN算法3、DoN分割步骤4、参考文献5、论文描述二、代码实现三、结果展示1、法线可视化结果2、对应曲率信息可视化3、利用曲率分类结果可视化4、欧式聚类分割结果本文由CSDN点云侠原创,原文链接,首发于:2020年07月27日。抄袭狗把自己当个狗加油抄,抄袭狗抄哪一篇进自己的付费专栏,我就哪一篇永久免费开放。博客长期更新,本文最新更新时间为:2025年1月1
- PCL 计算点云的VFH特征
点云侠'
点云学习c++visualstudio开发语言算法3d
目录一、概述二、代码三、结果内容抄自CSDN点云侠:【2024最新版】PCL点云处理算法汇总(C++长期更新版)。质量无忧,可放心复制粘贴。一、概述 VFH(ViewpointFeatureHistogram)特征是一种三维点云描述子,它结合了点云的局部几何信息和视点信息,以提高物体识别和分类的精度。VFH特征通过计算每个点云的法向量分布,生成一个308维的特征直方图,用于表示该点云的形状特征。
- cloud compare和 pcl读取点云因为viewpoint 配准不上
一个月可能改两次
c++base
pcd的默认viewpoint是0,0,0,1,0,0,0而在cloudcompare处理过后的iewpoint会改变,而每片点云的viewpoint都不一样所以会造成点云配准失败。针对CloudCompare软件处理过的pcd格式点云,在使用PCL进行特征点提取、配准等实验中最终显示结果出现点云位置偏差较大的问题,本博客给出解决方案。PCL处理的pcd格式点云数据,默认视点为:VIEWPOINT
- PCL 部分点云视点问题【2025最新版】
点云侠
PCL学习3d算法计算机视觉c++开发语言
目录一、问题概述二、解决方案1、软件实现2、代码实现三、调整之后博客长期更新,本文最近更新时间为:2025年1月18日。一、问题概述 针对CloudCompare软件处理过的pcd格式点云,在使用PCL进行特征点提取、配准等实验中最终显示结果出现点云位置偏差较大的问题,本博客给出解决方案。二、解决方案 PCL处理的pcd格式点云数据,默认视点为:VIEWPOINT0001000经CloudCo
- PCL 点云随机渲染颜色
MelaCandy
PCL点云算法与实战案例3d算法计算机视觉人工智能c++
目录一、概述1.1原理1.2实现步骤1.3应用场景二、代码实现2.1关键函数2.2完整代码三、实现效果PCL点云算法汇总及实战案例汇总的目录地址链接:PCL点云算法与项目实战案例汇总(长期更新)一、概述本文将介绍如何使用PCL库为点云中的每个点随机渲染颜色,并在PCL的可视化窗口中显示。这种方法适用于需要对点云中的不同点进行颜色区分的场景,可以帮助更直观地观察和分析点云数据。1.1原理在点云处理中
- pcl系列-添加自定义点云类型
不会算法的阿召
c++自动驾驶计算机视觉3d
pcl库中附带了各种预定义的点类型,这些数据类型足以支持在pcl中所实现的所有算法和方法,但是在某些情况下,在使用pcl点类型时希望定义新的点类型,比如在LIO-SAM中定义的PointXYZIRPYT(包括点云基本的坐标(x,y,z)和强度I,以及三个旋转角RPY和时间T)。因此,pcl提供了创建自定义点云类型的方法。1.pcl常用点云类型pcl中定义了大量的常用点类型,在定义自己的点类型之前,
- PCL 生成空间圆点云【2025最新版】
点云侠
PCL学习算法c++3d计算机视觉开发语言
目录一、算法原理二、代码实现三、结果展示本文由CSDN点云侠原创,原文链接。博客长期更新,最近一次更新时间为:2025年1月17日。代码在PCL1.14.1中测试通过。一、算法原理 三维空间圆形式如下:三维空间圆的参数方程:{
- PCL 点云按曲率大小渲染颜色【2025最新版】
点云侠
PCL学习可视化计算机视觉开发语言3dc++
目录一、表面曲率二、代码实现三、结果展示博客长期更新,本文最近更新时间为:2025年1月6日。一、表面曲率 本案例中,所使用的曲率是指根据点云的特征值计算出来的表面曲率。定义如下:任意一点PPP点的特征值满足
- PCL点云处理算法汇总(C++长期更新低价精品版)
点云侠'
点云学习算法c++开发语言计算机视觉
可笑,我当然知道是抄袭的啊,还用你提醒?要不是你们审核不作为,我能抄这么明目张胆???目录一、点云滤波1、常用滤波器2、采样滤波3、裁剪滤波二、KD树与八叉树1、KD树2、八叉树三、点云配准粗配准精配准对应关系配准精度坐标转换刚体运动变换四、点云拟合分割1、RANSAC2、其他几何分割五、三维重建六、特征点与特征描述1、点云的属性2、关键点提取3、特征描述子七、基础函数1、common模块2、其他
- PCL 点云高程渲染:实现点云高程信息的颜色渲染
技术征服冒险
PCL
PCL点云高程渲染:实现点云高程信息的颜色渲染点云渲染在计算机视觉和图形学中具有重要的应用价值。在处理点云数据时,一种常见的需求是通过将高程信息映射到颜色空间,以实现对点云的可视化。本文将介绍如何使用PCL(PointCloudLibrary)库实现点云的高程渲染,并提供相应的源代码。引言在开始之前,我们首先需要了解点云的基本概念。点云是由大量的三维点组成的数据集合,每个点都具有X、Y和Z坐标。点
- 用python编写的UKF(无迹卡尔曼滤波)代码,状态量和观测量都是三维、非线性的,注释使用中文
MATLAB卡尔曼
卡尔曼与pythonpython开发语言
用python编写的UKF(无迹卡尔曼滤波)代码,状态量和观测量都是三维、非线性的,注释使用中文文章目录代码讲解UKF类的构造预测步骤更新步骤辅助函数示例用法总结importnumpyasnpclassUKF:def__init__(self,dim_x,dim_z,alpha=1e-3,beta=2,kappa=0):self.dim_x=dim_x#状态维度self.dim_z=dim_z#观
- uni-app 开发华为鸿蒙HarmonyOS NEXT初体验
不知名靓仔
华为uni-appharmonyos
引言随着华为鸿蒙系统的不断发展,越来越多的开发者开始尝试使用uni-app来开发跨平台应用,特别是针对华为最新的HarmonyOSNEXT版本。本文将分享我在使用uni-app开发HarmonyOSNEXT应用的一些经验和心得,并提供具体的代码示例。1.开发环境准备1.1安装必备工具为了开始开发,你需要安装以下工具:Node.js:推荐使用LTS版本。uni-appCLI:可以通过npm安装。De
- 【PCL】Segmentation 模块—— 圆柱模型分割(Cylinder model segmentation)
old_power
PCL计算机视觉3Dc++
1、简介PCL(PointCloudLibrary)中的圆柱模型分割CylinderModelSegmentation是一种从点云数据中提取圆柱体模型的技术。它通过识别点云中符合圆柱体几何形状的部分,将圆柱体从其他几何形状中分离出来。1.1主要步骤预处理:对点云进行去噪、下采样等操作,以减少数据量并提升处理效率。法线估计:计算点云中每个点的法线,用于后续的模型拟合。模型拟合:使用RANSAC(随机
- PHP中的魔术函数
程序员阿凡提
PHP实战教程php开发语言魔术函数
PHP魔术函数是在某些情况下会自动调用的特殊函数,它们以双下划线`__`开头,以下是对常见PHP魔术函数的详细介绍:###构造函数和析构函数-**__construct()**:-这是一个构造函数,在创建类的新对象时会自动调用。它可以用于初始化对象的属性,执行必要的设置操作。```phpclassMyClass{ publicfunction__construct(){ echo"
- 00. 这里整理了最全的爬虫框架(Java + Python)
有一只柴犬
爬虫系列爬虫javapython
目录1、前言2、什么是网络爬虫3、常见的爬虫框架3.1、java框架3.1.1、WebMagic3.1.2、Jsoup3.1.3、HttpClient3.1.4、Crawler4j3.1.5、HtmlUnit3.1.6、Selenium3.2、Python框架3.2.1、Scrapy3.2.2、BeautifulSoup+Requests3.2.3、Selenium3.2.4、PyQuery3.2
- python-pcl函数_Python简介,第4章-函数
cumei1658
javawebglpythonluaios
python-pcl函数Runningthroughthedoor,Baldricfoundhimselfinanenormouscavern,itsceilinglostinshadow.Greatcolumnsofblackstonesoaredfromtheground,andpoolsoflavabubbledthroughout,lightingthecaverninadarkred.T
- java打印标签(机型TOSHIBA条码打印机B-EX4T)
嘘
JAVAjava
java打印标签实现方式标签效果代码获取更多相关资料实现rfid写入功能实现方式打印机设置网络ipjava获取socket连接,调用TPCL指令标签效果代码packageorg.jeecg.modules.invinfo.util;importorg.jeecg.modules.invinfo.vo.BatKcInventoryDetailVo;importorg.springframework.
- PCL 点云视窗类CloudViewer
LeonDL168
PCL算法计算机视觉人工智能视觉检测图像处理
点云视窗类CloudViewer是简单显示点云的可视化工具类,可以让用户用尽可能少的代码查看点云。注意:点云视窗类不能应用于多线程应用程序中。简单点云可视化如果用户想用几行代码可视化程序中所对应的地物,可以使用下面的代码:#include//...voidfoo(){pcl::PointCloud::Ptrcloud;//...为cloud添加对应的场景pcl::visualization::Cl
- PCL 怎样可视化深度图像
LeonDL168
PCL计算机视觉人工智能视觉检测图像处理算法
本小节讲解如何可视化深度图像的两种方法,在3D视窗中以点云形式进行可视化(深度图像来源于点云),另一种是,将深度值映射为颜色,从而以彩色图像方式可视化深度图像。代码首先,在PCL(PointCloudLearning)中国协助发行的书提供光盘的第7章例2文件夹中,打开名为range_image_visualization.cpp的代码文件,同文件夹下可以找到相关的测试点云文件room_scan1.
- WPF中图片的宫格显示
Vae_Mars
WPF-AI对话wpf
1.解释说明-使用ScrollViewer控件来达到滑动的效果-使用WrapPanel的自动换行特性,保证图片在占满横向空间后自动往下排布-使用foreach的方法来游历所有的图片url2.xaml代码示例3.cs代码示例//加载url转换成BitmapImageprivateasyncTaskLoadImageFromUrl(stringurl){try{using(HttpClientclie
- C# 网口通信(通过Sockets类)
萨达大
c#服务器网络网口通讯上位机
文章目录1.引入Sockets2.定义TcpClient3.连接网口4.发送数据5.关闭连接1.引入SocketsusingSystem.Net.Sockets;2.定义TcpClientprivateTcpClienttcpClient;//TcpClient实例privateNetworkStreamstream;//网络流,用于与服务器通信3.连接网口tcpClient=newTcpClie
- OkHttp搞定Http请求
头秃到底
文章目录OkHttp依赖包创建OkHttpClient构造UrlHeader头设定Get请求同步Get异步GetPost请求Json内容Form表单文件上传Put请求Json内容参数方式Delete请求OkHttp工具类OkHttp官方文档仓库OkHttp是一款高效的HTTP客户端框架:HTTP/2支持允许对同一主机的所有请求共享一个套接字。连接池可以减少请求延迟(如果HTTP/2不可用)。透明G
- 前端开发需要了解的算法知识
史努比的大头
算法前端
手写深拷贝functiondeepClone(obj){//处理基础数据类型和函数if(obj===null||typeofobj!=='object'){returnobj;}//处理数组if(Array.isArray(obj)){returnobj.map(item=>deepClone(item));}//处理对象constclonedObj={};for(constkeyinobj){i
- 遍历dom 并且存储(将每一层的DOM元素存在数组中)
换个号韩国红果果
JavaScripthtml
数组从0开始!!
var a=[],i=0;
for(var j=0;j<30;j++){
a[j]=[];//数组里套数组,且第i层存储在第a[i]中
}
function walkDOM(n){
do{
if(n.nodeType!==3)//筛选去除#text类型
a[i].push(n);
//con
- Android+Jquery Mobile学习系列(9)-总结和代码分享
白糖_
JQuery Mobile
目录导航
经过一个多月的边学习边练手,学会了Android基于Web开发的毛皮,其实开发过程中用Android原生API不是很多,更多的是HTML/Javascript/Css。
个人觉得基于WebView的Jquery Mobile开发有以下优点:
1、对于刚从Java Web转型过来的同学非常适合,只要懂得HTML开发就可以上手做事。
2、jquerym
- impala参考资料
dayutianfei
impala
记录一些有用的Impala资料
1. 入门资料
>>官网翻译:
http://my.oschina.net/weiqingbin/blog?catalog=423691
2. 实用进阶
>>代码&架构分析:
Impala/Hive现状分析与前景展望:http
- JAVA 静态变量与非静态变量初始化顺序之新解
周凡杨
java静态非静态顺序
今天和同事争论一问题,关于静态变量与非静态变量的初始化顺序,谁先谁后,最终想整理出来!测试代码:
import java.util.Map;
public class T {
public static T t = new T();
private Map map = new HashMap();
public T(){
System.out.println(&quo
- 跳出iframe返回外层页面
g21121
iframe
在web开发过程中难免要用到iframe,但当连接超时或跳转到公共页面时就会出现超时页面显示在iframe中,这时我们就需要跳出这个iframe到达一个公共页面去。
首先跳转到一个中间页,这个页面用于判断是否在iframe中,在页面加载的过程中调用如下代码:
<script type="text/javascript">
//<!--
function
- JAVA多线程监听JMS、MQ队列
510888780
java多线程
背景:消息队列中有非常多的消息需要处理,并且监听器onMessage()方法中的业务逻辑也相对比较复杂,为了加快队列消息的读取、处理速度。可以通过加快读取速度和加快处理速度来考虑。因此从这两个方面都使用多线程来处理。对于消息处理的业务处理逻辑用线程池来做。对于加快消息监听读取速度可以使用1.使用多个监听器监听一个队列;2.使用一个监听器开启多线程监听。
对于上面提到的方法2使用一个监听器开启多线
- 第一个SpringMvc例子
布衣凌宇
spring mvc
第一步:导入需要的包;
第二步:配置web.xml文件
<?xml version="1.0" encoding="UTF-8"?>
<web-app version="2.5"
xmlns="http://java.sun.com/xml/ns/javaee"
xmlns:xsi=
- 我的spring学习笔记15-容器扩展点之PropertyOverrideConfigurer
aijuans
Spring3
PropertyOverrideConfigurer类似于PropertyPlaceholderConfigurer,但是与后者相比,前者对于bean属性可以有缺省值或者根本没有值。也就是说如果properties文件中没有某个bean属性的内容,那么将使用上下文(配置的xml文件)中相应定义的值。如果properties文件中有bean属性的内容,那么就用properties文件中的值来代替上下
- 通过XSD验证XML
antlove
xmlschemaxsdvalidationSchemaFactory
1. XmlValidation.java
package xml.validation;
import java.io.InputStream;
import javax.xml.XMLConstants;
import javax.xml.transform.stream.StreamSource;
import javax.xml.validation.Schem
- 文本流与字符集
百合不是茶
PrintWrite()的使用字符集名字 别名获取
文本数据的输入输出;
输入;数据流,缓冲流
输出;介绍向文本打印格式化的输出PrintWrite();
package 文本流;
import java.io.FileNotFound
- ibatis模糊查询sqlmap-mapping-**.xml配置
bijian1013
ibatis
正常我们写ibatis的sqlmap-mapping-*.xml文件时,传入的参数都用##标识,如下所示:
<resultMap id="personInfo" class="com.bijian.study.dto.PersonDTO">
<res
- java jvm常用命令工具——jdb命令(The Java Debugger)
bijian1013
javajvmjdb
用来对core文件和正在运行的Java进程进行实时地调试,里面包含了丰富的命令帮助您进行调试,它的功能和Sun studio里面所带的dbx非常相似,但 jdb是专门用来针对Java应用程序的。
现在应该说日常的开发中很少用到JDB了,因为现在的IDE已经帮我们封装好了,如使用ECLI
- 【Spring框架二】Spring常用注解之Component、Repository、Service和Controller注解
bit1129
controller
在Spring常用注解第一步部分【Spring框架一】Spring常用注解之Autowired和Resource注解(http://bit1129.iteye.com/blog/2114084)中介绍了Autowired和Resource两个注解的功能,它们用于将依赖根据名称或者类型进行自动的注入,这简化了在XML中,依赖注入部分的XML的编写,但是UserDao和UserService两个bea
- cxf wsdl2java生成代码super出错,构造函数不匹配
bitray
super
由于过去对于soap协议的cxf接触的不是很多,所以遇到了也是迷糊了一会.后来经过查找资料才得以解决. 初始原因一般是由于jaxws2.2规范和jdk6及以上不兼容导致的.所以要强制降为jaxws2.1进行编译生成.我们需要少量的修改:
我们原来的代码
wsdl2java com.test.xxx -client http://.....
修改后的代
- 动态页面正文部分中文乱码排障一例
ronin47
公司网站一部分动态页面,早先使用apache+resin的架构运行,考虑到高并发访问下的响应性能问题,在前不久逐步开始用nginx替换掉了apache。 不过随后发现了一个问题,随意进入某一有分页的网页,第一页是正常的(因为静态化过了);点“下一页”,出来的页面两边正常,中间部分的标题、关键字等也正常,唯独每个标题下的正文无法正常显示。 因为有做过系统调整,所以第一反应就是新上
- java-54- 调整数组顺序使奇数位于偶数前面
bylijinnan
java
import java.util.Arrays;
import java.util.Random;
import ljn.help.Helper;
public class OddBeforeEven {
/**
* Q 54 调整数组顺序使奇数位于偶数前面
* 输入一个整数数组,调整数组中数字的顺序,使得所有奇数位于数组的前半部分,所有偶数位于数组的后半
- 从100PV到1亿级PV网站架构演变
cfyme
网站架构
一个网站就像一个人,存在一个从小到大的过程。养一个网站和养一个人一样,不同时期需要不同的方法,不同的方法下有共同的原则。本文结合我自已14年网站人的经历记录一些架构演变中的体会。 1:积累是必不可少的
架构师不是一天练成的。
1999年,我作了一个个人主页,在学校内的虚拟空间,参加了一次主页大赛,几个DREAMWEAVER的页面,几个TABLE作布局,一个DB连接,几行PHP的代码嵌入在HTM
- [宇宙时代]宇宙时代的GIS是什么?
comsci
Gis
我们都知道一个事实,在行星内部的时候,因为地理信息的坐标都是相对固定的,所以我们获取一组GIS数据之后,就可以存储到硬盘中,长久使用。。。但是,请注意,这种经验在宇宙时代是不能够被继续使用的
宇宙是一个高维时空
- 详解create database命令
czmmiao
database
完整命令
CREATE DATABASE mynewdb USER SYS IDENTIFIED BY sys_password USER SYSTEM IDENTIFIED BY system_password LOGFILE GROUP 1 ('/u01/logs/my/redo01a.log','/u02/logs/m
- 几句不中听却不得不认可的话
datageek
1、人丑就该多读书。
2、你不快乐是因为:你可以像猪一样懒,却无法像只猪一样懒得心安理得。
3、如果你太在意别人的看法,那么你的生活将变成一件裤衩,别人放什么屁,你都得接着。
4、你的问题主要在于:读书不多而买书太多,读书太少又特爱思考,还他妈话痨。
5、与禽兽搏斗的三种结局:(1)、赢了,比禽兽还禽兽。(2)、输了,禽兽不如。(3)、平了,跟禽兽没两样。结论:选择正确的对手很重要。
6
- 1 14:00 PHP中的“syntax error, unexpected T_PAAMAYIM_NEKUDOTAYIM”错误
dcj3sjt126com
PHP
原文地址:http://www.kafka0102.com/2010/08/281.html
因为需要,今天晚些在本机使用PHP做些测试,PHP脚本依赖了一堆我也不清楚做什么用的库。结果一跑起来,就报出类似下面的错误:“Parse error: syntax error, unexpected T_PAAMAYIM_NEKUDOTAYIM in /home/kafka/test/
- xcode6 Auto layout and size classes
dcj3sjt126com
ios
官方GUI
https://developer.apple.com/library/ios/documentation/UserExperience/Conceptual/AutolayoutPG/Introduction/Introduction.html
iOS中使用自动布局(一)
http://www.cocoachina.com/ind
- 通过PreparedStatement批量执行sql语句【sql语句相同,值不同】
梦见x光
sql事务批量执行
比如说:我有一个List需要添加到数据库中,那么我该如何通过PreparedStatement来操作呢?
public void addCustomerByCommit(Connection conn , List<Customer> customerList)
{
String sql = "inseret into customer(id
- 程序员必知必会----linux常用命令之十【系统相关】
hanqunfeng
Linux常用命令
一.linux快捷键
Ctrl+C : 终止当前命令
Ctrl+S : 暂停屏幕输出
Ctrl+Q : 恢复屏幕输出
Ctrl+U : 删除当前行光标前的所有字符
Ctrl+Z : 挂起当前正在执行的进程
Ctrl+L : 清除终端屏幕,相当于clear
二.终端命令
clear : 清除终端屏幕
reset : 重置视窗,当屏幕编码混乱时使用
time com
- NGINX
IXHONG
nginx
pcre 编译安装 nginx
conf/vhost/test.conf
upstream admin {
server 127.0.0.1:8080;
}
server {
listen 80;
&
- 设计模式--工厂模式
kerryg
设计模式
工厂方式模式分为三种:
1、普通工厂模式:建立一个工厂类,对实现了同一个接口的一些类进行实例的创建。
2、多个工厂方法的模式:就是对普通工厂方法模式的改进,在普通工厂方法模式中,如果传递的字符串出错,则不能正确创建对象,而多个工厂方法模式就是提供多个工厂方法,分别创建对象。
3、静态工厂方法模式:就是将上面的多个工厂方法模式里的方法置为静态,
- Spring InitializingBean/init-method和DisposableBean/destroy-method
mx_xiehd
javaspringbeanxml
1.initializingBean/init-method
实现org.springframework.beans.factory.InitializingBean接口允许一个bean在它的所有必须属性被BeanFactory设置后,来执行初始化的工作,InitialzingBean仅仅指定了一个方法。
通常InitializingBean接口的使用是能够被避免的,(不鼓励使用,因为没有必要
- 解决Centos下vim粘贴内容格式混乱问题
qindongliang1922
centosvim
有时候,我们在向vim打开的一个xml,或者任意文件中,拷贝粘贴的代码时,格式莫名其毛的就混乱了,然后自己一个个再重新,把格式排列好,非常耗时,而且很不爽,那么有没有办法避免呢? 答案是肯定的,设置下缩进格式就可以了,非常简单: 在用户的根目录下 直接vi ~/.vimrc文件 然后将set pastetoggle=<F9> 写入这个文件中,保存退出,重新登录,
- netty大并发请求问题
tianzhihehe
netty
多线程并发使用同一个channel
java.nio.BufferOverflowException: null
at java.nio.HeapByteBuffer.put(HeapByteBuffer.java:183) ~[na:1.7.0_60-ea]
at java.nio.ByteBuffer.put(ByteBuffer.java:832) ~[na:1.7.0_60-ea]
- Hadoop NameNode单点问题解决方案之一 AvatarNode
wyz2009107220
NameNode
我们遇到的情况
Hadoop NameNode存在单点问题。这个问题会影响分布式平台24*7运行。先说说我们的情况吧。
我们的团队负责管理一个1200节点的集群(总大小12PB),目前是运行版本为Hadoop 0.20,transaction logs写入一个共享的NFS filer(注:NetApp NFS Filer)。
经常遇到需要中断服务的问题是给hadoop打补丁。 DataNod