DSP28335使用FIFO的串口中断总结
一、串行通信与并行通信
DSP控制器间,DSP控制器与外部设备间交换信息,通信,可采取的通信方式主要两大类1、串行通信 2、并行通信。
并行通信一般包括多条数据线、多条控制线和状态线,传输速度快,传输线路多,硬件开销大,不适合远距离传输。一般用在系统内部,如XINTF接口或者控制器内部如DMA控制器。
串行通信则在通信线路上既传输数据信息也传输联络控制信息,硬件开销小,传输成本低,但是传输速度慢,且收发双方需要通信协议,可用于远距离通信。串行通信可以分为两大类1、同步通信 2、异步通信
同步通信:发送器和接收器通常使用同一时钟源来同步。方法是在发送器发送数据时同时包含时钟信号,接收器利用该时钟信号进行接收。典型的如I²C、SPI。
异步通信:收发双方的时钟不是同一个时钟,是由双方各自的时钟实现数据的发送和接收。但要求双方使用同一标称频率,允许有一定偏差。典型的如SCI。
二、28335SCI介绍
F28335处理器共提供3个SCI接口,相对TI的C240X系列DSP的SCI接口,功能上有很大的改进,在原有功能基础上增加了通信速率自动检测和FIFO缓冲等新的功能,为了减小串口通信时CPU的开销,F28335的串口支持16级接收和发送FIFO。也可以不使用FIFO缓冲。SCI接收器和发送器有各自独立的中断和使能位,可以独立地操作实现半双工通信,或者同时操作实现全双工通信。为了保证数据完整,SCI模块对接收到的数据进行间断、极性、超限和帧错误的检测。为了减少软件的负担,SCI采用硬件对通信数据进行极性和数据格式检查。通过对16位的波特率控制寄存器进行编程,可以配置不同的SCI通信速率。
所谓的FIFO就是先进先出的意思。SCI工作在FIFO模式下一般是因为所传输的信息并不是以一个帧为单位,而是以多个帧组成的一个包为信息单位的。比如说我的一个数据包由5个帧组成,第一个为控制字节,后四个字节共同组成一个浮点数。这时你可以设置FIFO接收中断为5个字节时产生中断。设置以后,每接收到5个字节后才会产生一次中断,而不是每接收一次产生一次中断。这样可以大幅减小CPU的开销。而先进先出的意思就是:在中断中,你读FIFO接收寄存器读到的数据是首先接收到的数据,再读一次的话读到的是接收到的第二个数据。而16深度的话就是最多能保存最近的16个接收数据,如果接收数据超过16个的话会产生相应的溢出,可以软件编程对溢出进行处理。
对于发送FIFO也是一样,你可以一次将多个数据放到发送FIFO中,然后DSP按先后顺序依次发送数据。
三、SCI模块的特点如下(通过相应的寄存器可以对这些功能进行设置)
(1)2个外部引脚:SCITXD为SCI数据发送引脚;SCIRXD为SCI数据接收引脚。两个引脚为多功能复用引脚,如果不使用可以作为通用数字量I/O。
(2)可编程通信速率,可以设置64K种通信速率。
(3)数据格式:
◇ 1个启动位;
◇ 1~8位可编程数据字长度;
◇可选择奇校验、偶校验或无效校验位模式;
◇ 1或2位的停止位。
(4)4种错误检测标志位:奇偶错误、超越错误、帧错误和间断检测。
(5)2种唤醒多处理器方式:空闲线唤醒(Idle-line)和地址位唤醒(AddressBit)。
(6)全双工或者半双工通信模式。
(7)双缓冲接收和发送功能。
(8)发送和接收可以采用中断和状态查询2种方式。
(9)独立地发送和接收中断使能控制。
(10)NRZ(非归零)通信格式。
(11)13个SCI模块控制寄存器,起始地址为7050H。
(12)自动通信速率检测(相对F140x增强的功能)。
(13)16级发送/接收FIFO(相对F240x增强的功能)。
四、SCI主要功能单元
(1) 1个发送器(TX)及相关寄存器。
◇ SCITXBUF:发送数据缓冲寄存器,存放要发送的数据(由CPU装载);
ScicRegs.SCITXBUF=a;//向数据缓冲寄存器中写入数据即可发送该数据◇ TXSHF寄存器:发送移位寄存器,从SCITXBUF寄存器接收数据,并将数据移位到SCITXD引脚上,每次移1位数据。
(2)1个接收器(RX)及相关寄存器。
◇ RXSHF寄存器:接收移位寄存器,从SCIRXD引脚移入数据,每次移1位;
◇ SCIRXBUF:接收数据缓冲寄存器,存放CPU要读取的数据,来自远程处理器的数据装入寄存器RXSHF,然后又装入接收数据缓冲寄存器SCIRXBUF和接收仿真缓冲寄存器SCIRXEMU中。
(3)一个可编程的波特率产生器。
(4)数据存储器映射的控制和状态寄存器。
五、SCI寄存器


SCICCR寄存器各位的功能如图所示,可以配置SCI的发送或接收的数据长度、是否使用奇偶校验、结束位的个数等。同理可知每个寄存器的各位有不同功能,写程序的时候查找相应的寄存器即可。(其实许多东西TI已经帮我们写好了,例如有FIFO的测试函数,我们可以在别人写好的基础上进行修改,加快进度)
六、SCI发送与接收功能介绍
可编程的中断级:发送和接收FIFO都能产生CPU中断,只要发送FIFO状态位TXFFST(位12~8)与中断触发优先级TXFFIL(位4~0)相匹配,就产生一个中断触发,从而为SCI的发送和接收提供一个可编程的中断触发逻辑。
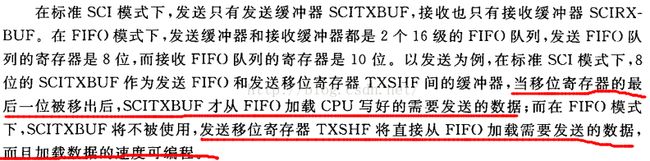
标准SCI的一个字的发送缓冲器作为发送FIFO和移位寄存器间的发送缓冲器。只有移位寄存器的最后一位被移出后,一个字的发送缓冲才从发送FIFO装载。使能FIFO后,经过一个可选择的延迟(SCIFFCT),TXSHF被直接装载而不再使用TXBUF。(与标准SCI相比,中断源变了,发送时标准的SCI是TXBUF为空)
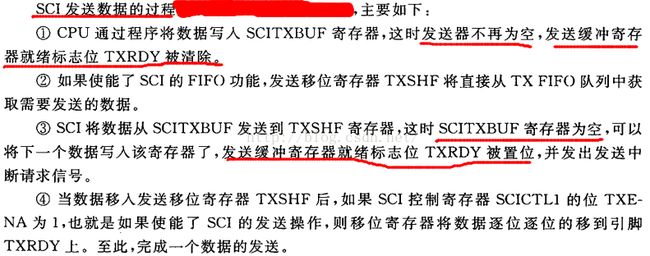
SCI发送数据过程划线处置位与清除都是硬件自动完成的。
七、仿真结果分析
最终的程序在下面。编写的程序功能是使用FIFO中断的形式发送一个数组,数组中起始数据是5,5,5,5。先发送这些数据(注意串口接收与发送的都是字符数据,发送数字量的时候要注意转化),然后在中断中修改第四个数据为中断的次数,然后发送新的数据。第一次的执行结果如图所示,
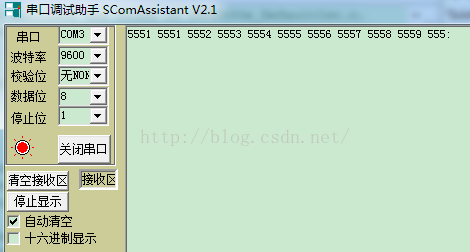
正确结果应该是5555,5551,...,分析结果可知,似乎是在开启中断之后就产生一次串口发送中断。但是中断标志位清零的啊。(猜测是因为串口发送缓冲寄存器中此时没有数据,给理解成了发送完毕。难道需要对发送缓冲寄存器先赋值再开中断?)(测试了下,把第一次要发送的数据再启动中断之前放入了FIFO中,输出结果是正确的)
在处理上一个问题的时候,遇到的另一个问题如下:
如上,串口实验的时候为什么先禁止发送功能后面的配置就不起作用了呢?我是在最后又开启了发送功能,但是接收不到数据,如果开始的时候没有禁止发送功能就可以接收到数据。其实原因如下,

虽然最后开启发送功能了,但是最后SW RESET位确被写入了0,导致复位,所有的配置都被复位了。(由此也说明了配置寄存器的时候要小心,确定每位的功能。而且配置的时候尽量只配置你需要的那一位,其他的不要改动。用bit,不要用all)
最终的结果如图所示,达到了预期的结果。也得出当FIFO中的数据全部发送完毕才会产生中断。
八、总结
实现一个功能的时候首先查看相关的资料,例如数据手册,论坛、百度、书籍等,搜集各种相关资料,然后看别人是如何实现的,分析下相关步骤,理清好思路。针对不懂的地方继续查找资料,层层递进。(如果想省事,可以在别人正确代码的基础上进行修改,看他配置了什么寄存器,实现了什么功能,然后根据自己的需求,查看数据手册重新配置),实现的时候可以一个个小功能的实现,遇到疑惑的除求助外,也可试着观察不同的情况下会出现什么结果。总之就是多搜,多想,多动手,多总结。
#include "DSP2833x_Device.h"
#include "DSP2833x_Examples.h"
#define SCIB 0
#define SCIC 1
// Prototype statements for functions found within this file.
void scic_fifo_init(void);
void scic_xmit(int a);
interrupt void uart_send(void);
// Global counts used in this example
Uint16 isrCount=0;
Uint16 ErrorCount=0;
Uint16 sdata[4]={5,5,5,5};//要发送的数据
void main(void)
{
Uint16 i=0;
// Step 1. Initialize System Control registers, PLL, WatchDog, Clocks to default state:
// This function is found in the DSP2833x_SysCtrl.c file.
InitSysCtrl();
// Step 2. Select GPIO for the device or for the specific application:
// This function is found in the DSP2833x_Gpio.c file.
// InitGpio(); skip this as this is example selects the I/O
// for SCI-A in this file itself
InitSciGpio();
// Step 3. Initialize PIE vector table:
// The PIE vector table is initialized with pointers to shell Interrupt
// Service Routines (ISR). The shell routines are found in DSP2833x_DefaultIsr.c.
// Insert user specific ISR code in the appropriate shell ISR routine in
// the DSP28_DefaultIsr.c file.
// Disable and clear all CPU interrupts:
DINT;
IER = 0x0000;
IFR = 0x0000;
// Initialize Pie Control Registers To Default State:
// This function is found in the DSP2833x_PieCtrl.c file.
// InitPieCtrl(); PIE is not used for this example
// Initialize the PIE Vector Table To a Known State:
// This function is found in DSP2833x_PieVect.c.
// This function populates the PIE vector table with pointers
// to the shell ISR functions found in DSP2833x_DefaultIsr.c.
InitPieVectTable();
// Enable CPU and PIE interrupts
// This example function is found in the DSP2833x_PieCtrl.c file.
EnableInterrupts();
// Step 4. Initialize all the Device Peripherals to a known state:
// This function is found in DSP2833x_InitPeripherals.c
// InitPeripherals(); skip this for SCI tests
// Step 5. User specific functions, Reassign vectors (optional), Enable Interrupts:
isrCount = 0;
ErrorCount = 0;
#if SCIB
scib_fifo_init(); // Initialize the SCI FIFO
scib_loopback_init(); // Initalize SCI
#elif SCIC
scic_fifo_init(); // Initialize the SCI FIFO
#endif
// Send a character ,先给发送缓冲寄存器赋值。
for(i=0;i<4;i++)
{
scic_xmit(sdata[i]+0x30);
}
scic_xmit(' ');
// Step 6. Send Characters forever starting with 0x00 and going through
// 0xFF. After sending each, check the recieve buffer for the correct value
EALLOW; // PieVectTable.SCIRXINTC = &uartIsr;
PieVectTable.SCITXINTC = &uart_send;
EDIS;
PieCtrlRegs.PIECTRL.bit.ENPIE=1;
// PieCtrlRegs.PIEIER8.bit.INTx5=1;
PieCtrlRegs.PIEIER8.bit.INTx6=1;
IER|=M_INT8;
EINT;
ERTM;
for(;;){ }
}
interrupt void uart_send(void)
{
Uint16 i;
isrCount++;
sdata[3]=isrCount;
for(i=0;i<4;i++)
{
scic_xmit(sdata[i]+0x30);
}
scic_xmit(' ');
if(isrCount==10)
{
ScicRegs.SCICTL1.bit.TXENA =0;//禁止发送缓冲器工作。
}
PieCtrlRegs.PIEACK.all=0xffff;//0x0080;
ScicRegs.SCIFFTX.bit.TXFFINTCLR=1; // Clear SCI Interrupt flag
}
// Transmit a character from the SCI'
void scic_xmit(int a)//发送一个数据a,类型为int
{
ScicRegs.SCITXBUF=a;//向数据缓冲寄存器中写入数据即可发送该数据
}
// Initalize the SCI FIFO
void scic_fifo_init()
{
// Test 1,SCIC DLB, 8-bit word, baud rate 9.6k, default, 1 STOP bit, no parity
//功能是配置发送模式
// Note: Clocks were turned on to the SCIC peripheral
// in the InitSysCtrl() function
// ScicRegs.SCICTL1.all =0x0000; //开始的时候先禁止接收与发送功能
ScicRegs.SCICCR.all =0x0007; // 1 stop bit, No loopback
// No parity,8 char bits,
// async mode, idle-line protocol
//数据长度8位,一个结束位,无奇偶校验,空闲线模式,禁止回送
// ScicRegs.SCICTL1.all =0x0003; // enable TX, RX, internal SCICLK,
// Disable RX ERR, SLEEP, TXWAKE
ScicRegs.SCICTL1.all =0x0002; //允许发送,禁止接收
// ScicRegs.SCICTL2.all =0x0001;//发送缓冲器中断使能。似乎与下面的重复了
ScicRegs.SCICTL2.bit.TXINTENA =1;//发送缓冲器中断使能。
// ScicRegs.SCICTL2.bit.RXBKINTENA =1;
ScicRegs.SCIHBAUD =0x0001;
ScicRegs.SCILBAUD =0x00e7;
//上面是波特率设置,书上写的0x00e7
// ScicRegs.SCICCR.bit.LOOPBKENA =0;// enable(Disable) loop back
ScicRegs.SCICTL1.all =0x0022; // Relinquish SCI from Reset
//FIFO设置
ScicRegs.SCIFFTX.bit.TXFIFOXRESET=0;
// ScicRegs.SCIFFRX.bit.RXFIFORESET=0;
ScicRegs.SCIFFTX.all=0xE060;
// ScicRegs.SCIFFRX.all=0x204f;
ScicRegs.SCIFFCT.all=0x0;
}
//===========================================================================
// No more.
//===========================================================================