- 「 2023-年度总结 」2023关于三掌柜的每个值得记录的时刻
目录前言顺利转正被任命为项目经理印象深刻的实战经历:项目重大版本上线系统学习新技术的心得体会获得腾讯云开发者社区优秀作者奖想要安利给所有人的开发工具技术大会招募线下沙龙圆桌主持新书发布上市受邀直播探会接受采访组织1024程序员节活动获得1024超级个体受邀参加特训营分享NPCon大会主持人成为开源讲师参加鸿蒙生态学堂·创新实训营北京站的培训番外篇番外的番外篇我的最大收获与成长2024新年Flag彩
- 小学生python游戏开发pygame--初始及基础知识
信息化未来
助孩成长pythonpygame开发语言
#1024程序员节|用代码,改变世界#小学生python游戏开发pygame1--基础知识前言知识点1、python知识点1.1RGB颜色表示1.2类2.3pygame.display.update()2.4加载图片2.5鼠标键盘2.6颜色2.7中文字体2.8音效总结源码获取前言Pygame是被设计用来写游戏的python模块集合,Pygame是在优秀的SDL库之上开发的功能性包。使用python
- 上海海事大学自动化专业C语言课程代码参考(第七周)
xiao咲
学习作业1024程序员节自动化c语言
想不到这么快就到了新的一周,写上周的作业仿佛就在两天前正好今天是1024程序员节,写C语言作业非常应景这周的作业主要是循环,话不多说,直接开始吧!目录上机实验4-1求1到100的和输入格式:输出格式:4-2求100以内偶数和输入格式:输出格式:4-3N分之一序列前N项和输入格式:输出格式:输入样例:输出样例:4-4求奇数分之一序列前N项和输入格式:输出格式:输入样例:输出样例:4-5求简单交错序列
- 提升自己才是王道
TigerChain
投资自己程序员节今天是1024程序员节日,在今天这个特殊的日子却蹦出一条,"缩招"新闻,也是继BATJ之后又一个事件,且不说这些事件的真伪「最后官方都出来辟谣」,通过这些事情我们能干什么,我们应该干什么才是值得我们去思考的企业难不得不承认,企业现在不好做,特别是今年,大的环境不怎么太好,小企业更是难上加难,更别提什么创业公司「成功的难可想而知,在夹缝中都不一定能生存」,现在刚刚过了招聘黄金阶段「俗
- 代码随想录-栈与队列|ACM模式(1024程序员节)
希希雾里
代码随想录感想leetcodec++数据结构算法1024程序员节
目录20.有效的括号题目描述:输入输出描述:思路和想法:1047.删除字符串中的所有相邻重复项题目描述:输入输出描述:思路和想法:150.逆波兰表达式求值题目描述:输入输出描述:思路和想法:239.滑动窗口最大值题目描述:输入输出描述:思路和想法:347.前K个高频元素题目描述:输入输出描述:思路和想法:20.有效的括号题目描述:给定一个只包括'(',')','{','}','[',']'的字符串
- 我的工作观
Bonnie714
看到鱼哥说今天的这篇文章,直接输入中秋节三个字就能跳过,我真的有些心动。好想就这样跳过休息一下,但是回过头一想,不可以,坚持任何一个好习惯都不是为了别人,而是自己。今天的话题是工作。提到工作,有时候我非常好奇。身边的许多人,包括我自己在内,我们总是会觉得别人的工作特别好,而是自己的工作哪都不行。刚好今天是1024程序员节日,在互联网公司上班,自然有很多程序员小哥哥,从一大早开始,总部HR就在带头给
- 1024程序员节|FFmpeg 调整声道数、采样率、码率
小曾同学.com
音视频1024程序员节FFmpeg调整采样率FFmpeg更改声道数FFmpeg命令大全
前言:作者简介:小曾同学.com,小伙伴们也可以叫我小曾,一个致力于测试开发的博主⛽️如果文章知识点有错误的地方,还请大家指正,让我们一起学习,一起进步。座右铭:不想当开发的测试,不是一个好测试✌️。如果感觉博主的文章还不错的话,还请点赞、收藏哦!之前给大家分享过流媒体资源归档,但是这些流媒体小编并没有对其进行再次划分,比如采样率或者声道数。因为最近有产品出现使用hev2编码方式的音视频,存在异常
- 使用PSIM软件生成DSP28335流水灯程序
嵌入式@hxydj
软件技巧DSP学习笔记PSIM软件学习PSIMDSP28335LED仿真代码
最近在学习DSP28335芯片,然后在使用PSIM仿真软件时发现这个仿真软件也支持28335芯片,于是就想学习下如何在PSIM软件中使用DSP28335芯片。在PSIM自带的官方示例中有使用DSP28335芯片的相关例子。工程下载链接https://download.csdn.net/download/qq_20222919/88770386 PSIM仿真的官方示例在安装目录下example
- 大模型上下文扩展之YaRN解析:从直接外推ALiBi、位置插值、NTK-aware插值、YaRN
v_JULY_v
论文代码应用大模型上下文扩展RoPEALiBi位置插值YaRN
前言下半年以来,我全力推动我司大模型项目团队的组建,我虽兼管整个项目团队,但为了并行多个项目,最终分成了三个项目组,每个项目都有一个项目负责人,分别为霍哥、阿荀、朝阳在今年Q4,我司第一项目组的第一个项目「AIGC模特生成平台」得到CSDN蒋总的大力支持,并亮相于CSDN举办的1024程序员节,一上来就吸引了很多市里领导、媒体、观众的关注,如今该平台的入口链接已在七月官网右上角而第二项目组的论文审
- 1024程序员节 | 美团技术团队做了这样一件小事
美团技术团队
“老师,你看我跳的高不高!”“老师,我想和你玩老鹰抓小鸡”“老师,我知道,这是能送东西的无人机”……七嘴八舌的声音围绕着韩洋和仕禄两位程序员,这是他们当“幼儿园老师”的初体验。也是美团技术团队和孩子们的一个美好约定。打开方式一延续1024程序员节的专属爱心一年前的今天,美团技术团队通过捐赠技术博客稿费和讲师课酬,为美团乡村儿童操场公益计划捐赠了1,024个拼接地板,跟美团1409位爱心网友一起,帮
- 邮件归档与数据匹配:筛选出未按时提交邮件的员工名单
邓大帅
★工程实战vlookupVLOOKUP函数邮件数据匹配Excel
又是一年1024,近期由于诸多事务需要同步处理,博客更新不积极,感谢粉丝们的支持与守候,之后我将尽可能地将更多干货与心得呈现于大家,敬请期待。值此1024程序员节,想和大家探讨下日常工作中大批量数据匹配的问题。在日常工作中,对于收集邮件的任务,较为繁琐的一环就是邮件的归档和数据匹配,能否在短时间内快速筛选出未按时提交邮件的员工名单,直接影响着后续工作能否顺利开展。近期发现许多人并不知如何进行数据筛
- simulink代码生成(六)——多级中断的配置
沉沙丶
中断simulink电机控制代码生成dsp28335
假如系统中存在多个中断,需要合理的配置中断的优先级与中断向量表;在代码生成中,要与中断向量表对应;中断相关的知识参照博客:DSP28335学习——中断向量表的初始化_中断向量表什么时候初始化-CSDN博客F28335中断系统及其应用————DSPTMS320F28335学习笔记(二)_dspf28335中断跳出循环后如何回到循环-CSDN博客1、dsp28335三级中断机制由于外设中断源有58个,
- simulink代码生成(五)——SCI接受模块;如何将串口发送的数据显示在matlab中
沉沙丶
matlab开发语言代码生成simulink
首先,实现DSP28335的自收自发;添加串口收发模块;设置参数,根据硬件选择串口模块:配置中断触发;SCIB的接收中断的CPU中断号为9,PIE级中断为3;因此如下配置;代码生成,先看看发送一个简单的1,查看是否完成功能;然后尝试是否可以自收自发;可以实现;然后,实现DSP28335接收数据的simulink显示;搭建HOST模型运行后显示:查看电脑串口状态;查看电脑占用情况串口:(转载)Win
- simulink代码生成(五)——ePWM模块初级应用
沉沙丶
simulink代码生成dsp28335电机控制ePWM
前面分别讲到了SCI及ADC的配置及使用,现在梳理一下ePWM的配置和使用;先打一些基础的DSP28335的基础知识;F28335关于ePWM中断与SOC采样信号的一些思考_socasel-CSDN博客F28335ePWM模块简介——TMS320F28335学习笔记(四)_28335采集交流电-CSDN博客F28335ePWM模块完整配置源代码+注释_f28335中pwm波配置代码注释-CSDN博
- DSP28335之CAN通信易错点总结
Cyber。丶
单片机dsp开发
一、CAN初始化流程①接收发送引脚初始化;②接收和发送邮箱设置;③邮箱使能;④波特率配置;⑤接收掩码设置;⑥中断配置。二、几个重要的知识点①影子寄存器因为ECanbRegs是不可以单独对位操作,所以需要设置先将其指向影子寄存器,设置影子寄存器的值,然后再把影子寄存器的值指向ECanbRegs,我们可以看到初始化中都是这样的套路;②CANMD、CANME、CANMC、CANGIM好几个类似的结构体成
- 关于DSP28335设置内存分配设置堆栈笔记
KK红
DSP学习笔记笔记
关于DSP28335设置内存分提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录关于DSP28335设置内存分前言一、设置堆栈这里主要是说明函数中的局部变量第一步:如何设置28335的stack找到cmd文件如下图第二步:查看函数里面局部变量地址如图二、使用步骤1.函数2.其他代码总结前言提示:这里可以添加本文要
- 一种带缓存DSP28335 CAN程序
紫气东来d
DSP28335can
一、概述在嵌入式系统中,CAN(控制器局域网络)是一种常用的通信协议。然而,为了保证数据的稳定传输和处理效率,我们需要设计一种高效的CAN驱动程序。本文将介绍一种基于DSP28335的带缓存CAN驱动程序设计,该设计主要分为三层:CHAL层、BSP层和应用层。1.CHAL层:CHAL层是CAN驱动的底层实现,主要负责CAN的读写操作。这一层直接与硬件交互,实现对CAN控制器的配置和数据的发送接收。
- 1024程序员节,节日快乐
朱光亮_19强化班
1024程序员节是广大程序员的共同节日。1024是2的十次方,二进制计数的基本计量单位之一。针对程序员经常周末加班与工作日熬夜的情况,部分互联网机构倡议每年的10月24日为1024程序员节,在这一天建议程序员拒绝加班。程序员就像是一个个1024,以最低调、踏实、核心的功能模块搭建起这个科技世界。1G=1024M,而1G与1级谐音,也有一级棒的意思。节日背景:程序员(英文Programmer)是从事
- 祝各位程序员节日快乐
数据分析不是个事儿
社畜生活生活
今天是1024程序员节,小编祝各位Windows开机蓝屏,Linux开机KernelPanic,macos开机五国,服务器iDRAC/iLO/IPMI/KVM全部失联,路由器全爆炸,路由表内存全溢出,交换机全环路,防火墙全阻断,无线信道全冲突,压接网线全短路,bgp全漏表,机柜全断电,raid全爆炸,nas数据全丢,光模块全炸,光纤全不通,光猫全烫手,电表全倒转,空开全烧穿。PHP全FatalEr
- 1024
Z_sam
杂
1024纪念一下1024程序员节是中国程序员的共同节日。1024是2的十次方,二进制计数的基本计量单位之一。程序员(英文Programmer)是从事程序开发、维护的专业人员。程序员就像是一个个1024,以最低调、踏实、核心的功能模块搭建起这个科技世界。1G=1024M,而1G与1级谐音,也有一级棒的意思。
- 1024程序员节竟然和他有关?
我只会写Bug啊
杂谈1024程序员节
目录介绍节日背景节日由来介绍1024程序员节(1024Programmer’sDay)是广大程序员的共同节日。1024是2的十次方,二进制计数的基本计量单位之一。针对程序员经常周末加班与工作日熬夜的情况,部分互联网机构倡议每年的10月24日为1024程序员节,在这一天建议程序员拒绝加班。程序员就像是一个个1024,以最低调、踏实、核心的功能模块搭建起这个科技世界。1G=1024M,而1G与1级谐音
- 【趣味Javascript】前端开发中不为人知的LHS和RHS查询,你真的弄明白了吗? 《1024程序员节特别篇》
极客小俊
【趣味Javascript】1024程序员节前端开发LHS和RHS查询javascript编程知识分享作用域链函数
个人主页极客小俊✍作者简介:web开发者、设计师、技术分享博主希望大家多多支持一下,我们一起进步!如果文章对你有帮助的话,欢迎评论点赞收藏加关注前言今天是1024先祝大家节日快乐,那么今天我就给大家讲一个js小知识,也就是LHS和RHS可能还有很多朋友不知道LHS和RHS是个啥玩意!那么在我们讲解LHS和RHS之前我们先来回忆一下最简单的赋值操作!vartest=100;console.log(t
- 1024程序员节日:庆祝创新与编码的盛宴
爱笑的男孩。
活动1024程序员节
作者主页:爱笑的男孩。的博客_CSDN博客-深度学习,活动,python领域博主爱笑的男孩。擅长深度学习,活动,python,等方面的知识,爱笑的男孩。关注算法,python,计算机视觉,图像处理,深度学习,pytorch,神经网络,opencv领域.https://blog.csdn.net/Code_and516?type=blog个人简介:打工人。持续分享:机器学习、深度学习、python相
- 1024程序员节快乐
李格式
今天是1024程序员节,致敬互联网时代最可爱的人。他们改变了我们出行、购物、支付等方式,他们改变了这个世界。对于一个屌丝来讲,什么职业能令人获得崇高的敬意?只有程序员吧。程序员是一群单纯的人,他们只管将精力用到技术上,精益求精就好。见过很多程序员,问他们为什么选择这个职业。他们说:“自己没什么背景,也不会搞什么关系,又不会销售,在家乡可能就是最底层的人,能吃饱饭就不错了。但做程序员就不一样了,只要
- DSP28335学习笔记1
求真_慎独
dsp28335dsp
DSP学习笔记一、28335资源1.28335实际上不是DSP而是DSC2.28335集成了DSP和微控制器的长处,主要用在控制,DSP是数字信号处理,能够在一个周期内完成3232位的乘法累加运算,而普通的单片机需要4个周期以上3.DSP具有快速的中断响应4.28335为32位浮点DSP,主频是150Mhz有epwm的设备,Flash256k16位,SRAM34k*16位,ADC12位,80ns转
- DSP28335学习笔记-LED闪烁
xusowu
学习笔记
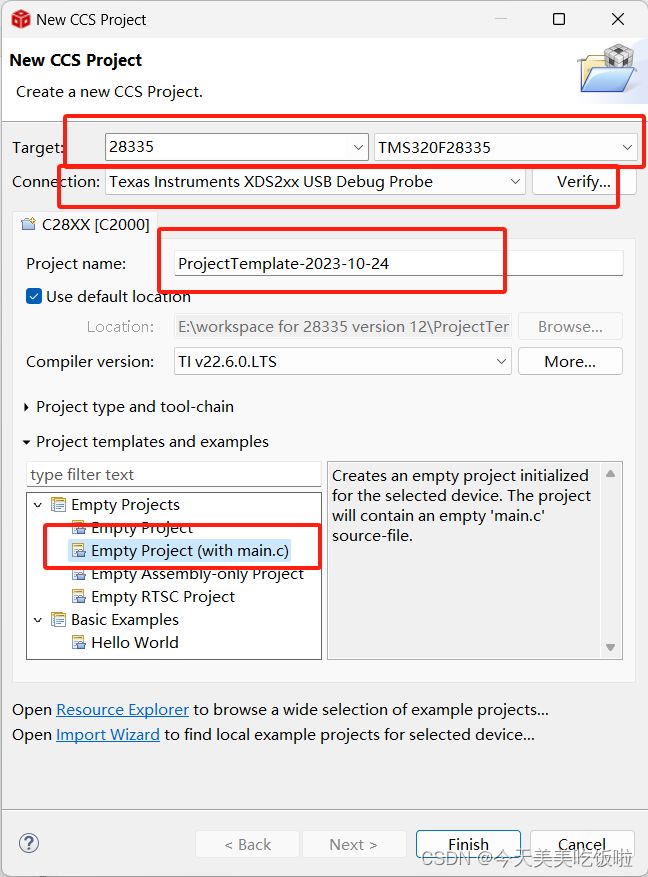
在完成DSP28335工程新建后,要跟着例程学习DSP的编程。如果学习C语言的第一个神奇的实验是在屏幕上显示出:Hello,world!那个对于单片机编程来说,第一个实验肯定就是点亮一个LED灯。就是控制引脚IO口输出。本文是在南京研旭的例程基础上编写完成的。1.编写主函数步骤1:初始化系统控制函数,包括PLL,看门狗,使能外设时钟,这个函数的原型在DSP2833x_SysCtrl.c中查找Ini
- DSP28335笔记——系统时钟 和 GPIO
阿诏阿詔Auyv
嵌入式dsp
DSP28335笔记——系统时钟和GPIO闲谈原本信誓旦旦的说要在这个寒假拓展自己能力为一年后毕业工作提高自我竞争力,但是事实证明人类的惰性实在难以克服。开发板到手有三天,在没有外界压力情况下的自我学习效率也确实低的可怜,没办法只好自己给自己施加压力了。希望能够通过博客给自己的学习做个记录,同时也能实现自我监督的目的。文章目录DSP28335笔记——系统时钟和GPIO闲谈一、DSP28335简介二
- 我的编程之旅:热爱代码,燃烧激情
琴剑飘零西复东
程序人生业界资讯学习方法创业创新改行学it
正好适逢1024程序员节,我想通过这篇博客文章,表达对编程的热爱,同时也鼓励更多的人踏上这条充满无限可能的道路。我还记得第一次接触编程的时刻,那是在大学的一堂计算机科学课上。当我第一次看到一个简单的“Hello,World!”程序在屏幕上显示出来时,我被深深吸引住了。那时的我对编程一无所知,但我立刻明白,这就是我要追求的事业。我的编程之旅并不是一帆风顺的。起初,我常常遇到困难,感觉陷入了无尽的Bu
- 基于敏捷开发的低代码平台建设
万应低代码
低代码万应低代码云畅科技低代码敏捷开发软件构建
10月24日,由湖南省工业和信息化厅、湖南湘江新区管委会指导,长沙市工业和信息化局、长沙信息产业园管委会、CSDN主办,湖南省软件行业协会、国家超级计算长沙中心承办的2023长沙·中国1024程序员节——湖南“智赋万企”软件产业高质量发展论坛在长沙举办。云畅科技CTO胡艳平受邀出席并发表以《基于敏捷开发的低代码平台建设》为主题的演讲,深入浅出地分享了如何通过敏捷开发和低代码平台的建设,实现软件产业
- Vue3 开发实战分享——打印插件 Print.js 的使用(Vue3 + Nodejs + Print.js 实战)以及 el-table 与 el-pagination 的深入使用(下)
黛琳ghz
前端#Vue#Elementjavascriptvue.js前端1024程序员节
文章目录关于CSDN1024前情回顾&前言关于el-table项目中延申使用1️⃣获取每行对应的内容数据2️⃣行内数据判断处理(过滤)3️⃣对表格内容的索引关于el-pagination项目中延申使用1️⃣显示总条数与分页展示2️⃣跳转页和页码样式3️⃣设置为中文最后关于CSDN1024在进入文章的正文之前,我们先一起了解一下关于CSDN今年的1024程序员节。与此同时这也是我在CSDN参与的第二
- jQuery 跨域访问的三种方式 No 'Access-Control-Allow-Origin' header is present on the reque
qiaolevip
每天进步一点点学习永无止境跨域众观千象
XMLHttpRequest cannot load http://v.xxx.com. No 'Access-Control-Allow-Origin' header is present on the requested resource. Origin 'http://localhost:63342' is therefore not allowed access. test.html:1
- mysql 分区查询优化
annan211
java分区优化mysql
分区查询优化
引入分区可以给查询带来一定的优势,但同时也会引入一些bug.
分区最大的优点就是优化器可以根据分区函数来过滤掉一些分区,通过分区过滤可以让查询扫描更少的数据。
所以,对于访问分区表来说,很重要的一点是要在where 条件中带入分区,让优化器过滤掉无需访问的分区。
可以通过查看explain执行计划,是否携带 partitions
- MYSQL存储过程中使用游标
chicony
Mysql存储过程
DELIMITER $$
DROP PROCEDURE IF EXISTS getUserInfo $$
CREATE PROCEDURE getUserInfo(in date_day datetime)-- -- 实例-- 存储过程名为:getUserInfo-- 参数为:date_day日期格式:2008-03-08-- BEGINdecla
- mysql 和 sqlite 区别
Array_06
sqlite
转载:
http://www.cnblogs.com/ygm900/p/3460663.html
mysql 和 sqlite 区别
SQLITE是单机数据库。功能简约,小型化,追求最大磁盘效率
MYSQL是完善的服务器数据库。功能全面,综合化,追求最大并发效率
MYSQL、Sybase、Oracle等这些都是试用于服务器数据量大功能多需要安装,例如网站访问量比较大的。而sq
- pinyin4j使用
oloz
pinyin4j
首先需要pinyin4j的jar包支持;jar包已上传至附件内
方法一:把汉字转换为拼音;例如:编程转换后则为biancheng
/**
* 将汉字转换为全拼
* @param src 你的需要转换的汉字
* @param isUPPERCASE 是否转换为大写的拼音; true:转换为大写;fal
- 微博发送私信
随意而生
微博
在前面文章中说了如和获取登陆时候所需要的cookie,现在只要拿到最后登陆所需要的cookie,然后抓包分析一下微博私信发送界面
http://weibo.com/message/history?uid=****&name=****
可以发现其发送提交的Post请求和其中的数据,
让后用程序模拟发送POST请求中的数据,带着cookie发送到私信的接入口,就可以实现发私信的功能了。
- jsp
香水浓
jsp
JSP初始化
容器载入JSP文件后,它会在为请求提供任何服务前调用jspInit()方法。如果您需要执行自定义的JSP初始化任务,复写jspInit()方法就行了
JSP执行
这一阶段描述了JSP生命周期中一切与请求相关的交互行为,直到被销毁。
当JSP网页完成初始化后
- 在 Windows 上安装 SVN Subversion 服务端
AdyZhang
SVN
在 Windows 上安装 SVN Subversion 服务端2009-09-16高宏伟哈尔滨市道里区通达街291号
最佳阅读效果请访问原地址:http://blog.donews.com/dukejoe/archive/2009/09/16/1560917.aspx
现在的Subversion已经足够稳定,而且已经进入了它的黄金时段。我们看到大量的项目都在使
- android开发中如何使用 alertDialog从listView中删除数据?
aijuans
android
我现在使用listView展示了很多的配置信息,我现在想在点击其中一条的时候填出 alertDialog,点击确认后就删除该条数据,( ArrayAdapter ,ArrayList,listView 全部删除),我知道在 下面的onItemLongClick 方法中 参数 arg2 是选中的序号,但是我不知道如何继续处理下去 1 2 3
- jdk-6u26-linux-x64.bin 安装
baalwolf
linux
1.上传安装文件(jdk-6u26-linux-x64.bin)
2.修改权限
[root@localhost ~]# ls -l /usr/local/jdk-6u26-linux-x64.bin
3.执行安装文件
[root@localhost ~]# cd /usr/local
[root@localhost local]# ./jdk-6u26-linux-x64.bin&nbs
- MongoDB经典面试题集锦
BigBird2012
mongodb
1.什么是NoSQL数据库?NoSQL和RDBMS有什么区别?在哪些情况下使用和不使用NoSQL数据库?
NoSQL是非关系型数据库,NoSQL = Not Only SQL。
关系型数据库采用的结构化的数据,NoSQL采用的是键值对的方式存储数据。
在处理非结构化/半结构化的大数据时;在水平方向上进行扩展时;随时应对动态增加的数据项时可以优先考虑使用NoSQL数据库。
在考虑数据库的成熟
- JavaScript异步编程Promise模式的6个特性
bijian1013
JavaScriptPromise
Promise是一个非常有价值的构造器,能够帮助你避免使用镶套匿名方法,而使用更具有可读性的方式组装异步代码。这里我们将介绍6个最简单的特性。
在我们开始正式介绍之前,我们想看看Javascript Promise的样子:
var p = new Promise(function(r
- [Zookeeper学习笔记之八]Zookeeper源代码分析之Zookeeper.ZKWatchManager
bit1129
zookeeper
ClientWatchManager接口
//接口的唯一方法materialize用于确定那些Watcher需要被通知
//确定Watcher需要三方面的因素1.事件状态 2.事件类型 3.znode的path
public interface ClientWatchManager {
/**
* Return a set of watchers that should
- 【Scala十五】Scala核心九:隐式转换之二
bit1129
scala
隐式转换存在的必要性,
在Java Swing中,按钮点击事件的处理,转换为Scala的的写法如下:
val button = new JButton
button.addActionListener(
new ActionListener {
def actionPerformed(event: ActionEvent) {
- Android JSON数据的解析与封装小Demo
ronin47
转自:http://www.open-open.com/lib/view/open1420529336406.html
package com.example.jsondemo;
import org.json.JSONArray;
import org.json.JSONException;
import org.json.JSONObject;
impor
- [设计]字体创意设计方法谈
brotherlamp
UIui自学ui视频ui教程ui资料
从古至今,文字在我们的生活中是必不可少的事物,我们不能想象没有文字的世界将会是怎样。在平面设计中,UI设计师在文字上所花的心思和功夫最多,因为文字能直观地表达UI设计师所的意念。在文字上的创造设计,直接反映出平面作品的主题。
如设计一幅戴尔笔记本电脑的广告海报,假设海报上没有出现“戴尔”两个文字,即使放上所有戴尔笔记本电脑的图片都不能让人们得知这些电脑是什么品牌。只要写上“戴尔笔
- 单调队列-用一个长度为k的窗在整数数列上移动,求窗里面所包含的数的最大值
bylijinnan
java算法面试题
import java.util.LinkedList;
/*
单调队列 滑动窗口
单调队列是这样的一个队列:队列里面的元素是有序的,是递增或者递减
题目:给定一个长度为N的整数数列a(i),i=0,1,...,N-1和窗长度k.
要求:f(i) = max{a(i-k+1),a(i-k+2),..., a(i)},i = 0,1,...,N-1
问题的另一种描述就
- struts2处理一个form多个submit
chiangfai
struts2
web应用中,为完成不同工作,一个jsp的form标签可能有多个submit。如下代码:
<s:form action="submit" method="post" namespace="/my">
<s:textfield name="msg" label="叙述:">
- shell查找上个月,陷阱及野路子
chenchao051
shell
date -d "-1 month" +%F
以上这段代码,假如在2012/10/31执行,结果并不会出现你预计的9月份,而是会出现八月份,原因是10月份有31天,9月份30天,所以-1 month在10月份看来要减去31天,所以直接到了8月31日这天,这不靠谱。
野路子解决:假设当天日期大于15号
- mysql导出数据中文乱码问题
daizj
mysql中文乱码导数据
解决mysql导入导出数据乱码问题方法:
1、进入mysql,通过如下命令查看数据库编码方式:
mysql> show variables like 'character_set_%';
+--------------------------+----------------------------------------+
| Variable_name&nbs
- SAE部署Smarty出现:Uncaught exception 'SmartyException' with message 'unable to write
dcj3sjt126com
PHPsmartysae
对于SAE出现的问题:Uncaught exception 'SmartyException' with message 'unable to write file...。
官方给出了详细的FAQ:http://sae.sina.com.cn/?m=faqs&catId=11#show_213
解决方案为:
01
$path
- 《教父》系列台词
dcj3sjt126com
Your love is also your weak point.
你的所爱同时也是你的弱点。
If anything in this life is certain, if history has taught us anything, it is
that you can kill anyone.
不顾家的人永远不可能成为一个真正的男人。 &
- mongodb安装与使用
dyy_gusi
mongo
一.MongoDB安装和启动,widndows和linux基本相同
1.下载数据库,
linux:mongodb-linux-x86_64-ubuntu1404-3.0.3.tgz
2.解压文件,并且放置到合适的位置
tar -vxf mongodb-linux-x86_64-ubun
- Git排除目录
geeksun
git
在Git的版本控制中,可能有些文件是不需要加入控制的,那我们在提交代码时就需要忽略这些文件,下面讲讲应该怎么给Git配置一些忽略规则。
有三种方法可以忽略掉这些文件,这三种方法都能达到目的,只不过适用情景不一样。
1. 针对单一工程排除文件
这种方式会让这个工程的所有修改者在克隆代码的同时,也能克隆到过滤规则,而不用自己再写一份,这就能保证所有修改者应用的都是同一
- Ubuntu 创建开机自启动脚本的方法
hongtoushizi
ubuntu
转载自: http://rongjih.blog.163.com/blog/static/33574461201111504843245/
Ubuntu 创建开机自启动脚本的步骤如下:
1) 将你的启动脚本复制到 /etc/init.d目录下 以下假设你的脚本文件名为 test。
2) 设置脚本文件的权限 $ sudo chmod 755
- 第八章 流量复制/AB测试/协程
jinnianshilongnian
nginxluacoroutine
流量复制
在实际开发中经常涉及到项目的升级,而该升级不能简单的上线就完事了,需要验证该升级是否兼容老的上线,因此可能需要并行运行两个项目一段时间进行数据比对和校验,待没问题后再进行上线。这其实就需要进行流量复制,把流量复制到其他服务器上,一种方式是使用如tcpcopy引流;另外我们还可以使用nginx的HttpLuaModule模块中的ngx.location.capture_multi进行并发
- 电商系统商品表设计
lkl
DROP TABLE IF EXISTS `category`; -- 类目表
/*!40101 SET @saved_cs_client = @@character_set_client */;
/*!40101 SET character_set_client = utf8 */;
CREATE TABLE `category` (
`id` int(11) NOT NUL
- 修改phpMyAdmin导入SQL文件的大小限制
pda158
sqlmysql
用phpMyAdmin导入mysql数据库时,我的10M的
数据库不能导入,提示mysql数据库最大只能导入2M。
phpMyAdmin数据库导入出错: You probably tried to upload too large file. Please refer to documentation for ways to workaround this limit.
- Tomcat性能调优方案
Sobfist
apachejvmtomcat应用服务器
一、操作系统调优
对于操作系统优化来说,是尽可能的增大可使用的内存容量、提高CPU的频率,保证文件系统的读写速率等。经过压力测试验证,在并发连接很多的情况下,CPU的处理能力越强,系统运行速度越快。。
【适用场景】 任何项目。
二、Java虚拟机调优
应该选择SUN的JVM,在满足项目需要的前提下,尽量选用版本较高的JVM,一般来说高版本产品在速度和效率上比低版本会有改进。
J
- SQLServer学习笔记
vipbooks
数据结构xml
1、create database school 创建数据库school
2、drop database school 删除数据库school
3、use school 连接到school数据库,使其成为当前数据库
4、create table class(classID int primary key identity not null)
创建一个名为class的表,其有一