【其他】Tensorflow分布式使用简介
一、 单机多GPU训练
深度学习由于存在计算量大,并且需要大量的数据来训练的问题,因而需要采用一些并行机制来加快训练速度,目前常用的并行方法主要有数据并行(data parallel)和模型并行(model parallel)两种。下面主要介绍tensorflow框架采用的数据并行方法 。
1.1 数据并行原理
数据并行的原理如下图所示,假设有两块显卡(GPU1和GPU2),我们经常使用CPU来负责梯度平均和参数更新,另外两块显卡主要负责训练模型副本(model replica)。
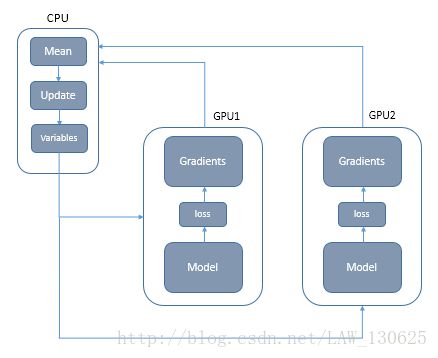
主要步骤:
① 首先是构图,由于tensorflow主要采用静态图,所以在构图时可以使用for循环分别在GPU1、GPU2上分别定义模型参数变量,网络结构(一致的);
② 分发两个batch的数据, 每个GPU处理一个batch的数据计算,进行前向传播计算出loss,然后计算出关于当前Variables的gradients;
③ 把所有GPU算的梯度汇总到CPU上,CPU对梯度进行平均计算,然后对模型的参数进行更新;
④ 重复步骤①-③,直到模型收敛。
1.2 主要代码示例
# 对应①、②步,进行构图,分别在每个GPU上定义模型参数变量,网络结构;
x_input = tf.placeholder(tf.int32, shape=[num_gpus,batch_size,..],name="input")
y_input = tf.placeholder(tf.int64, [num_gpus, batch_size,…],name='targets')
optimizer = tf.train.GradientDescentOptimizer(current_learning_rate)
global_step = tf.Variable(0, name="global_step") tower_grads = []
with tf.variable_scope(tf.get_variable_scope(),initializer=initializer):
for i in xrange(num_gpus):
with tf.device('/gpu:%d' % i):
with tf.name_scope('%s_%d' % (TOWER_NAME, i)) as scope:
target_list = inference_graph(x_input[i])
logits= y_input[i]
# share variables
tf.get_variable_scope().reuse_variables()
tvars = tf.trainable_variables()
loss = loss_graph(logits, target_list,scope)
grads,global_norm=tf.clip_by_global_norm(tf.gradients(
loss, tvars), FLAGS.max_grad_norm)
tower_grads.append(grads)
grads = average_gradients(tower_grads)
train_op=optimizer.apply_gradients(zip(grads,tvars),global_step=global_step)注意事项:
① 在第一步中定义模型参数时,要考虑到不同模型副本之间要能够共享变量,因此要采用tf.get_variable()函数而不是直接tf.Variables(),tf.get_variable拥有一个变量检查机制,会检测已经存在的变量是否设置为共享变量,如果已经存在的变量没有设置为共享变量,TensorFlow 运行到第二个拥有相同名字的变量的时候,就会报错。
② 在tensorflow是基于已经定义好的Graph进行模型迭代式训练的,因此在每次迭代过程中,只会对当前的模型参数进行更新,而不会调用tf.get_variable()函数重新定义模型变量,因此变量共享只是存在于模型定义阶段的一个概念。
# 此处对应步骤中的第三步,所有GPU输出的梯度数据传到CPU上,对梯度取平均操作
def average_gradients(tower_grads):
average_grads = []
for i,all_grads in enumerate(zip(*tower_grads)):
if i ==0:
average_grads.append(all_grads[0])
continue
grads = []
for g in all_grads:
expanded_g = tf.expand_dims(g, 0)
grads.append(expanded_g)
grad = tf.concat(axis=0, values=grads)
grad = tf.reduce_mean(grad, 0)
average_grads.append(grad)
return average_grads
注意事项:
①在编写计算梯度平均函数average_gradients()时,不同的计算梯度方法计算出来的梯度格式有所区别,这里的示例使用tf.gradients(),并使用tf.clip_by_global_norm()对梯度进行修剪,应注意得到的梯度格式然后进行相应的梯度平均计算。
二、分布式多机多GPU训练
随着模型越来越复杂,模型参数越来越多,当参数的量级上升到百亿量级甚至更大之后,参数的更新的性能都是问题。假设单机有四块显卡,那么一个step也只能处理四个batch的数据,这对于训练一些超大训练集来说是远远不能满足的,这个时候就需要多机多卡进行训练,即分布式的深度学习训练方法。
2.1 参数服务器
多机多卡的思想跟单机多卡是类似的,即在GPU上训练,然后汇总到CPU上更新,只不过当模型越来越大,模型的参数越来越多,一台机器的性能都不能满足的时候,那么就可以把参数分开放到不同的机器去存储和更新,于是就有了参数服务器的概念,参数服务器可以是多台机器组成的集群。
2.2 tensorflow的分布式
tensorflow的分布式有in-graph和between-gragh两种架构模式。
①in-graph 模式。在in-graph模式, 把计算从单机多GPU扩展到了多机多GPU了,不过数据分发还是在一个节点。这样的好处是配置简单,其他多机多GPU的计算节点,只要起个join操作,暴露一个网络接口,等在那里接受任务就好了。 这些计算节点暴露出来的网络接口,使用起来就跟本机的一个GPU的使用一样, 只要在操作的时候指定tf.device(“/job:worker/task:n”),就可以向指定GPU一样,把操作指定到一个计算节点上计算,使用起来和多GPU的类似。但是这样的坏处是训练数据的分发依然在一个节点上,要把训练数据分发到不同的机器上, 严重影响并发训练速度。
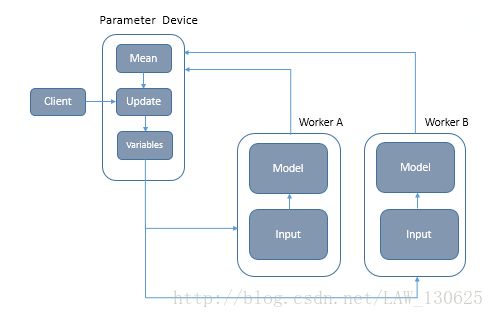
②between-graph模式。在between-graph模式下,训练的参数保存在参数服务器, 数据不用分发, 数据分片的保存在各个计算节点,各个计算节点自己算自己的, 算完了之后, 把要更新的参数告诉参数服务器,参数服务器更新参数。这种模式的优点是不用训练数据的分发了,在训练大数据量的时候可以节省了大量的时间,所以大数据深度学习还是推荐使用between-graph模式。
between-graph模式使用可见图2示意图,我们只需要在训练过程中,根据机器的数量启动相应数量的worker,其中每个worker可以根据其task_index读入其负责的数据进行训练。
上述两种模式都支持同步和异步更新。同步更新即每一次所有分发出去的数据计算完成后,汇总所有返回的梯度求平均,再更新参数,那么处理的速度就取决于最慢的那个分片计算的时间。异步更新是所有的计算节点,各自算自己的,更新参数也是自己更新自己计算的结果,这样就有一个明显的问题就个某个节点可能已经算完更新了参数,可能另一个节点还是用的原来的参数计算计算,即存在很难控制参数的问题。综合来看还是推荐使用同步更新,这样网络更新比较稳定,容易控制。
2.3 主要代码示例
import argparse
import sys
import tensorflow as tf
FLAGS = None
def main(_):
ps_hosts = FLAGS.ps_hosts.split(",")
worker_hosts = FLAGS.worker_hosts.split(",")
# Create a cluster from the parameter server and worker hosts.
cluster = tf.train.ClusterSpec({"ps": ps_hosts, "worker": worker_hosts})
# Create and start a server for the local task.
server = tf.train.Server(cluster,
job_name=FLAGS.job_name,
task_index=FLAGS.task_index)
if FLAGS.job_name == "ps":
server.join()
elif FLAGS.job_name == "worker":
# Assigns ops to the local worker by default.
with tf.device(tf.train.replica_device_setter(
worker_device="/job:worker/task:%d" % FLAGS.task_index,
cluster=cluster)):
# Build model...
loss = ...
global_step = tf.contrib.framework.get_or_create_global_step()
train_op = tf.train.AdagradOptimizer(0.01).minimize(
loss, global_step=global_step)
# The StopAtStepHook handles stopping after running given steps.
hooks=[tf.train.StopAtStepHook(last_step=1000000)]
# The MonitoredTrainingSession takes care of session initialization,
# restoring from a checkpoint, saving to a checkpoint, and closing when done
# or an error occurs.
with tf.train.MonitoredTrainingSession(master=server.target,
is_chief=(FLAGS.task_index == 0),
hooks=hooks) as mon_sess:
while not mon_sess.should_stop():
# Run a training step asynchronously.
# See `tf.train.SyncReplicasOptimizer` for additional details on how to
# perform *synchronous* training.
# mon_sess.run handles AbortedError in case of preempted PS.
mon_sess.run(train_op)
其中tf.train.ClusterSpec是根据参数服务器和工作主机创建一个集群,其中需要把所有的参数服务器和工作主机的ip和端口的信息都包含进去。
tf.train.Server创建并启动本地任务的服务器,后面根据执行的命令的参数不同,决定了这个任务是哪个任务。
可以看到,如果参数是ps,那么就是负责参数更新的工作,如果worker那么就负责计算的工作,tf.train. replica_device_setter为负责在相应worker上构建图的副本,默认情况下,只有变量操作被放置在ps任务上。
tf.train.MonitoredTrainingSession负责初始化session,可以从checkpoint恢复模型,以及保存模型到checkpoint,这个工作是在所有的计算节点里指定一个主节点完成的,即由参数is_chief指定。需要注意的是这里的global_step的值,是所有计算节点共享的,在执行optimizer的minimize的时候,会自动加1,所以可以通过这个可以知道所有的计算节点一共计算了多少步了。
上述代码就是一个大体的tensorflow多机框架,那么如何部署多机多卡呢?其实很简单,就是把第一部分的单机多卡构图代码加到build mode部分就可以完成多机多卡的部署了。
启动命令:
PS:CUDA_VISIBLE_DEVICES=' ' python train_distribute.py --ps_hosts=172.28.92.31:2220 --worker_hosts=172.28.92.31:2221, 172.28.92.32:2222 --job_name=ps --task_index=0
Worker1:python train:distribute.py --ps_hosts=172.28.92.31:2220 --worker_hosts=172.28.92.31:2221, 172.28.92.32:2222 --job_name=ps --task_index=0
Worker1:python train_distribute.py --ps_hosts=172.28.92.31:2220 --worker_hosts=172.28.92.31:2221, 172.28.92.32:2222 --job_name=ps --task_index=1
可以看到在参数服务器的启动中,使用CUDA_VISIBLE_DEVICES=’ ‘,这可以使其可见的显卡数为空,因参数服务器主要使用CPU,之后可以再在这台机器上启用一个worker,即一台机器可以同时作为一个ps和一个worker。
参考文献:
①https://www.tensorflow.org/deploy/distributed
②http://blog.csdn.net/luodongri/article/details/52596780
③http://blog.csdn.net/diligent_321/article/details/53187166