模糊聚类算法(FCM)
伴随着模糊集理论的形成、发展和深化,RusPini率先提出模糊划分的概念。以此为起点和基础,模糊聚类理论和方法迅速蓬勃发展起来。针对不同的应用,人们提出了很多模糊聚类算法,比较典型的有基于相似性关系和模糊关系的方法、基于模糊等价关系的传递闭包方法、基于模糊图论的最大支撑树方法,以及基于数据集的凸分解、动态规划和难以辨别关系等方法。然而,上述方法均不能适用于大数据量的情况,难以满足实时性要求较高的场合,因此实际应用并不广泛。
模糊聚类分析按照聚类过程的不同大致可以分为三大类:
(1)基于模糊关系的分类法:其中包括谱系聚类算法(又称系统聚类法)、基于等价关系的聚类算法、基于相似关系的聚类算法和图论聚类算法等等。它是研究比较早的一种方法,但是由于它不能适用于大数据量的情况,所以在实际中的应用并不广泛。
(2)基于目标函数的模糊聚类算法:该方法把聚类分析归结成一个带约束的非线性规划问题,通过优化求解获得数据集的最优模糊划分和聚类。该方法设计简单、解决问题的范围广,还可以转化为优化问题而借助经典数学的非线性规划理论求解,并易于计算机实现。因此,随着计算机的应用和发展,基于目标函数的模糊聚类算法成为新的研究热点。
(3)基于神经网络的模糊聚类算法:它是兴起比较晚的一种算法,主要是采用竞争学习算法来指导网络的聚类过程。
在介绍算法之前,先介绍下模糊集合的知识。
HCM聚类算法
首先说明隶属度函数的概念。隶属度函数是表示一个对象x 隶属于集合A 的程度的函数,通常记做μA(x),其自变量范围是所有可能属于集合A 的对象(即集合A 所在空间中的所有点),取值范围是[0,1],即0<=μA(x),μA(x)<=1。μA(x)=1 表示x 完全隶属于集合A,相当于传统集合概念上的x∈A。一个定义在空间X={x}上的隶属度函数就定义了一个模糊集合A,或者叫定义在论域X={x}上的模糊子集A’。对于有限个对象x1,x2,……,xn 模糊集合A’可以表示为:
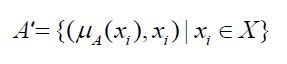
有了模糊集合的概念,一个元素隶属于模糊集合就不是硬性的了,在聚类的问题中,可以把聚类生成的簇看成模糊集合,因此,每个样本点隶属于簇的隶属度就是[0,1]区间里面的值。
再接下来要讲FCM算法不得不先讲一下HCM算法
硬C-均值(HCM)算法是实现数据集J硬C划分的经典算法之一,也是最受欢迎的算法之一。它能够把数据集X分成C个超椭球结构的聚类。HCM算法把传统的聚类问题归结为如下的非线性数学规划问题:
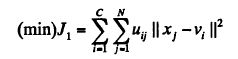
其中U=(uij)cxn为硬C-划分矩阵,V=(v1,v2,,,vc)为C个聚类中心,||·||代码欧式距离。
HCM算法的具体流程如下:
初始化:指定聚类类别数C,2<=C<=n,n是数据个数,设定迭代停止阈值Ɛ,初始化聚类中心V0,设置迭代计数器b=0;
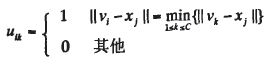
步骤一:根据下面的公式计算或更新划分矩阵U
步骤二:根据下面公式更新聚类中心V(b+1)
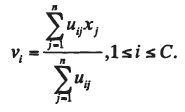
步骤三:如果||Vb – V(b+1)||< Ɛ,则算法停止并输出划分矩阵和聚类中心V,否则令b=b+1,转向执行步骤一
FCM聚类算法
Dunn按照RusPini定义的模糊划分的概念,把HCM算法扩展到模糊划分领域。Dunn对每个样本与每个聚类中心的距离用其隶属度平方加权,从而把类内误差平方和目标函数J1扩展为类内加权误差平方和函数J2:
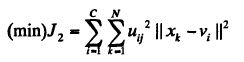
Bezdek又将Dunn的目标函数推广为更普遍的形式,给出了基于目标函数的模糊聚类更一般的描述。

其中,m∈[1,+∞)称为加权指数,又称作平滑参数。尽管从数学角度看,m的出现不自然,但如果不对隶属度加权,从HCM算法到FCM算法的推广将是无效的。
FCM算法的具体流程如下:
初始化:指定聚类类别数C,2<=C<=n,n是数据个数,设定迭代停止阈值Ɛ,初始化聚类中心V0,设置迭代计数器b=0;
步骤一:根据下面的公式计算或更新划分矩阵U
步骤二:根据下面公式更新聚类中心V(b+1)
步骤三:如果||Vb – V(b+1)||< Ɛ,则算法停止并输出划分矩阵和聚类中心V,否则令b=b+1,转向执行步骤一
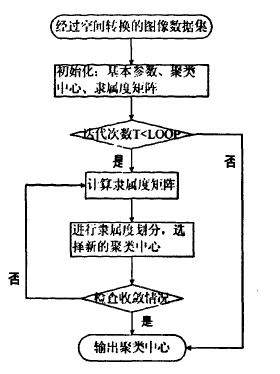
FCM算法流程图
FCM算法是目前比较流行的一种模糊聚类算法,究其原因大致有以下几个方面:首先,模糊C—均值泛函Jm仍是传统硬C一均值泛函J1的自然推广;硬C一均值泛函J1是一个应用十分广泛的聚类准则,对其在理论上的研究己经相当完善,这就为Jm的研究提供了良好的条件;数学上看,Jm与RS的希尔伯特空间结构(正交投影和均方逼近理论)有密切的关系,因此比其它泛函有更深厚的数学基础;最后,也是最重要的是该目标函数不仅在许多领域获得了非常成功的应用,而且以FCM算法为基础,人们提出的基于其它原型的模糊聚类算法,形成了一大批FCM类型的算法:如模糊C一线(FCL)、模糊C一面(FCP)等聚类算法,分别实现了对呈线状、超平面状结构模式子集(或聚类)的检测。
FCM算法应用到颜色迁移中
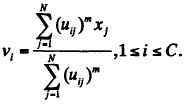
钱小燕等人将聚类算法应用到色彩迁移中,提出了一种基于图像模糊颜色聚类的自适应色彩迁移算法。该算法首先将源图像和目标图像分别转换到lαβ颜色空间:利用FCM 算法把源图像和目标图像划分为具有不同颜色特征的聚类,然后分析图像中的颜色特征:分别算出每个域的匹配权值,对每个目标图像的匹配权值,从源图像中选取一个最接近域作为最佳匹配域;最后根据目标图像各聚类域与源图像中的匹配域之间的关系,引入隶属度因子,两个域的处理结果分别进行加权平均,获得色彩迁移结果。使用FCM的思想对图像进行聚类域划分的思路是:设准备处理图像I的大小是S×H,即对颜色聚类颜色分析的个数是N,N = S×H,则图像I可表示成集合,I={p1 ,p2 ...,pn }。图像被分为c类,每个类的聚类中心为V={v1,v2 ...,vc },用uik表示像素pk隶属于聚类中心Vi的隶属度,定义图像的隶属度矩阵U。具体算法如下:
步骤一:把源图像和目标图像分别从RGB转换到lαβ空间。
步骤二:确定待处理图像聚类域个数c,然后初始化聚类中心。假设加权指数m=2,设定处理的最大迭代次数为50。
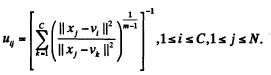
步骤三:当迭代次数T 小于50 时,根据初始化聚类中心计算隶属度矩阵。如果pk≠vi,则对于所有的vi ( i=1,2,...,C ),利用下式计算隶属度矩阵。

其中,i =1,2,...C; j =1,2,...N
如果,pk=vi,,k =1,2,...N则
其中,dik为第k个元素到第i 个聚类中心的距离,定义在lαβ下的欧式距离。
![]()
步骤四:对图像聚类划分。图像的隶属度矩阵中,从每列选择隶属度最大的点作为相对应点的归属域,并重新计算聚类中心。
步骤五:对收敛情况进行检查。若||Vi – V’i||<Σ,则立即停止迭代;否则一直迭代计算步骤三与步骤四。
步骤六:对聚类域进行匹配。使用FCM 后,对每一个聚类域分别设置一个匹配权值参数w,当目标图像是灰度图像时,w为聚类域的亮度均值;当目标图像为彩色图像时,w 是聚类域3 个通道标准差的加权平均值。
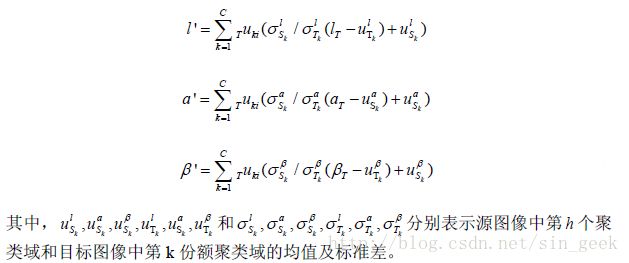
步骤七:色彩迁移。为了保持通用性,假定目标图像中元素pi的归属域与源图像中聚类域h 是匹配域,利用下式获得各个通道的新值:

FCM算法效果图
- BOOL TranFCM(LPBYTE lpDIBBits, LONG lmageWidth, LONG lmageHeight,LPBYTE lpDIBBits2, LONG lmageWidth2, LONG lmageHeight2,LPBYTE lpDIBBits3)
- {
- int classnum=2;
- int m=2;
- int i,j,k,nindex;
- double l,a,b;
- double* belong=new double[lmageWidth*lmageHeight*classnum];
- double* belong2=new double[lmageWidth2*lmageHeight2*classnum];
- double* center=new double[classnum*3];
- double* center2=new double[classnum*3];
- int* clustermap=new int[classnum];
- double suml,suma,sumb;
- FCMCluster(lpDIBBits,lmageWidth,lmageHeight,belong,center,classnum,m);
- FCMCluster(lpDIBBits2,lmageWidth2,lmageHeight2,belong2,center2,classnum,m);
- double* vl=new double[classnum];
- double* va=new double[classnum];
- double* vb=new double[classnum];
- double* vl2=new double[classnum];
- double* va2=new double[classnum];
- double* vb2=new double[classnum];
- for(i=0;i
- {
- BYTE distance=255;
- int map=-1;
- BYTE r,g,b,r2,g2,b2;
- for(j=0;j
- {
- LabToRgb(center[i*3+0],center[i*3+1],center[i*3+2],r,g,b);
- LabToRgb(center2[j*3+0],center2[j*3+1],center2[j*3+2],r2,g2,b2);
- BYTE dis=abs(RgbToGray(r,g,b)-RgbToGray(r2,g2,b2));
- if (distance>dis) {distance=dis;map=j;}
- }
- clustermap[i]=map;
- }
- //TranColor(belong,belong2,center,center2);
- //求各聚类域的标准差
- //求结果图像的lab
- for(j = 0;j
- {
- for(i = 0; i
- {
- nindex=((lmageHeight-j-1)*lmageWidth+i);
- suml=suma=sumb=0;
- RgbToLab(lpDIBBits[nindex*3+2],lpDIBBits[nindex*3+1],lpDIBBits[nindex*3+0],l,a,b);
- for(k=0;k
- {
- suml += belong[lmageWidth*lmageHeight*k+nindex]*center2[clustermap[k]*3+0];
- suma += belong[lmageWidth*lmageHeight*k+nindex]*center2[clustermap[k]*3+1];
- sumb += belong[lmageWidth*lmageHeight*k+nindex]*center2[clustermap[k]*3+2];
- }
- LabToRgb(l,suma,sumb,lpDIBBits3[nindex*3+2],lpDIBBits3[nindex*3+1],lpDIBBits3[nindex*3+0]);
- }
- }
- return TRUE;
- }
- BOOL FCMCluster(LPBYTE lpDIBBits, LONG lmageWidth, LONG lmageHeight,double* belong,double* center,int classnum,int m)
- {
- int i,j,l,nindex;//循环控制变量
- int k=0;
- int LOOP=500;
- double* center2=new double[classnum*3];//聚类中心
- long x,y;//随机确定聚类中心坐标
- long* num=new long[classnum];//每个类的像素个数
- double* lpImageLab = new double[lmageWidth*lmageHeight*3];
- double sumu,suml,suma,sumb;
- //初始化聚类中心
- for(i=0;i
- {
- x=rand()%lmageWidth;
- y=rand()%lmageHeight;
- nindex=((lmageHeight-y-1)*lmageWidth+x);
- RgbToLab(lpDIBBits[nindex*3+2],lpDIBBits[nindex*3+1],lpDIBBits[nindex*3+0],center[i*3+0],center[i*3+1],center[i*3+2]);
- for(j=0;j
- {
- double dis=DistanceLab(center[i*3+0],center[i*3+1],center[i*3+2],center[j*3+0],center[j*3+1],center[j*3+2]);
- if(dis<0.2) {i--;break;}//限值公式 暂取限值为1待优化 对初始化聚类中心的选择非常关键
- }
- }
- //计算隶属度矩阵、更新聚类中心、直至前后聚类中心距离小于限值e暂定0.1待优化
- while(k!=classnum && LOOP--)//限值公式
- {
- //计算隶属度矩阵
- for(j = 0;j
- {
- for(i = 0; i
- {
- nindex=((lmageHeight-j-1)*lmageWidth+i);
- RgbToLab(lpDIBBits[nindex*3+2],lpDIBBits[nindex*3+1],lpDIBBits[nindex*3+0],
- lpImageLab[nindex*3+0],lpImageLab[nindex*3+1],lpImageLab[nindex*3+2]);
- //means_Assign();
- double blg=-1;//隶属度
- for(k=0;k
- {
- sumu=0;
- double dis1=DistanceLab(lpImageLab[nindex*3+0],lpImageLab[nindex*3+1],lpImageLab[nindex*3+2],center[k*3+0],center[k*3+1],center[k*3+2]);
- if (dis1==0) {belong[lmageWidth*lmageHeight*k+nindex]=1;continue;}
- for(l=0;l
- {
- double dis2=DistanceLab(lpImageLab[nindex*3+0],lpImageLab[nindex*3+1],lpImageLab[nindex*3+2],center[l*3+0],center[l*3+1],center[l*3+2]);
- if (dis2==0) break;
- sumu+=pow((dis1*dis1)/(dis2*dis2),1.0/(m-1));
- }
- if (l!=classnum) {belong[lmageWidth*lmageHeight*k+nindex]=0;continue;}
- belong[lmageWidth*lmageHeight*k+nindex]=1/sumu;
- }
- }
- }
- //更新聚类中心
- for(k=0;k
- {
- suml=suma=sumb=sumu=0;
- for(j = 0;j
- {
- for(i = 0; i
- {
- nindex=((lmageHeight-j-1)*lmageWidth+i);
- suml+=pow(belong[lmageWidth*lmageHeight*k+nindex],m)*lpImageLab[nindex*3+0];
- suma+=pow(belong[lmageWidth*lmageHeight*k+nindex],m)*lpImageLab[nindex*3+1];
- sumb+=pow(belong[lmageWidth*lmageHeight*k+nindex],m)*lpImageLab[nindex*3+2];
- sumu+=pow(belong[lmageWidth*lmageHeight*k+nindex],m);
- }
- }
- center2[k*3+0]=suml/sumu;
- center2[k*3+1]=suma/sumu;
- center2[k*3+2]=sumb/sumu;
- }
- //判断循环终止条件
- for(k=0;k
- {
- if(DistanceLab(center[k*3+0],center[k*3+1],center[k*3+2],center2[k*3+0],center2[k*3+1],center2[k*3+2])>0.1) break;//限值e暂定0.1待优化
- }
- for(i=0;i
- {
- center[i]=center2[i];
- }
- }
- return TRUE;
- }
- double DistanceLab(double l1,double a1,double b1,double l2,double a2,double b2)
- {
- double lx=l1-l2;
- double ax=a1-a2;
- double bx=b1-b2;
- if (lx<0) lx=-lx;
- if (ax<0) ax=-ax;
- if (bx<0) bx=-bx;
- return lx+ax+bx;
- }
代码链接