深度学习算法之YOLOv2
一. 久违的新版本
YOLO 问世已久,不过风头被SSD盖过不少,原作者自然不甘心,YOLO v2 的提出给我们带来了什么呢?
先看一下其在 v1的基础上做了哪些改进,直接引用作者的实验结果了:
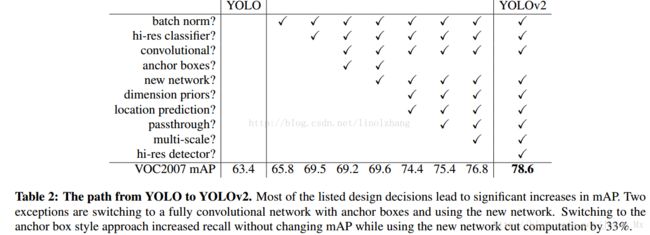
条目不少,好多Trick,我们一个一个来看:
A)Batch Normalization(批量规范化)
先建立这样一个观点: 对数据进行预处理(统一格式、均衡化、去噪等)能够大大提高训练速度,提升训练效果。
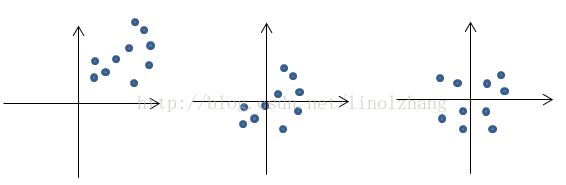
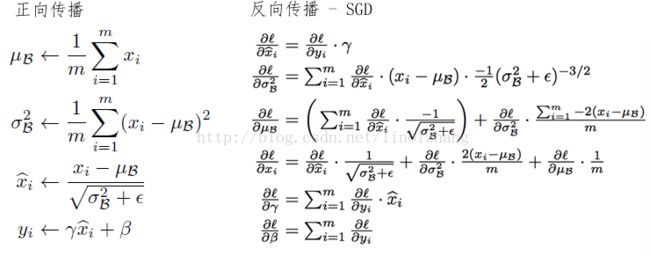
批量规范化 正是基于这个假设的实践,对每一层输入的数据进行加工。示意图:
Batch Normalization,简称 BN,由Google提出,是指对数据的 归一化、规范化、正态化。BN 作为近几年最火爆的Trick之一,主流的CNN都已集成。
该方法的提出基于以下背景:
1)神经网络每层输入的分布总是发生变化,通过标准化上层输出,均衡输入数据分布,加快训练速度;
可以设置较大的学习率和衰减,而不用去care初始参数,BN总能快速收敛,调参狗的福音。
2)通过规范化输入,降低激活函数在特定输入区间达到饱和状态的概率,避免 gradient vanishing 问题;
举个例子:0.95^64 ≈ 0.0375 计算累积会产生数据偏离中心,导致误差的放大或缩小。
3)输入规范化对应样本正则化,在一定程度上可以替代 Drop Out;
Drop Out的比例也可以被无视了,全自动的节奏。
BN 的做法是 在卷积池化之后,激活函数之前,对每个数据输出进行规范化(均值为 0,方差为 1)。
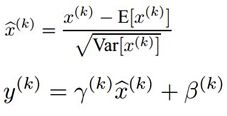
公式很简单,第一部分是 Batch内数据归一化(其中 E为Batch均值,Var为方差),Batch数据近似代表了整体训练数据。
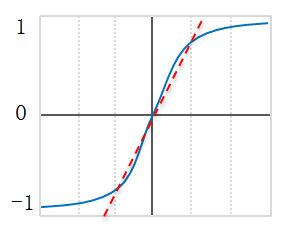
第二部分是亮点,即引入 附加参数 γ 和 β(Scale & Shift),Why? 因为简单的归一化 相当于只使用了激活函数中近似线性的部分(如下图红色虚线),破坏了原始数据的特征分布,这会降低模型表达能力。
这两个参数需要通过训练得到:
关于这一层的函数定义、反向求导 等具体推理本章不再做进一步介绍,大家肯定可以搜到很多专门讲 BN的文献。
B)High Resolution Classifier
YOLO 对应训练过程分为两步,第一步是通过 ImageNet 训练集 进行高分辨率的预训练,这一步训练的是分类网络;第二步是训练检测网络,是在分类网络的基础上进行 fine tune。
之前的 YOLO v1以分辨率224*224训练分类网络,YOLO v2 将分类网络的分辨率提高到 448*448,高分辨率样本对于效果有一定的提升(文中mAp提高了约4%)。
高分辨率对于精度的提高是显而易见的,这点我们不去论证。
C)New Network(新网络)
为保证后续 Anchor Boxes 讲解的连续性,这里将New Network提前。
作者对网络进行了改进:
1)不同于SSD的VGG-16网络,作者采用的基础网络是Googlenet,并且加入了自己的订制,来看数据对比:
Googlenet vs VGG-16
前向传播运算量(一次) 85.2亿次 306.9亿次
精度(224 * 224) 88% 90% single-crop,top-5 accuracy
整体来看,VGG-16整体精确度较高,但计算量过于复杂,性价比不高。
2)YOLO v2采用了常用的3 * 3卷积核,在每一次池化操作后把通道数翻倍。借鉴了network in network的思想,网络使用了全局平均池化(global average pooling)做预测,把1 * 1的卷积核置于3 * 3的卷积核之间,用来压缩特征。
YOLO v2包含19个卷积层、5个最大值池化层(max pooling layers )。
D)Convolutional With Anchor Boxes
Faster的 Anchor 机制又一次得到印证,与SSD一样,Anchor建立了和原始坐标的对应关系:
定义了不同的Scale和宽高比,一个中心对应K个不同尺度和宽高比的Boxes。
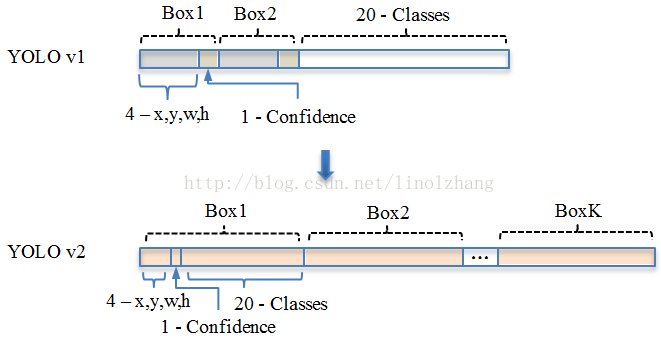
YOLO v1: S*S* (B*5 + C) => 7*7(2*5+20)
其中B对应Box数量,5对应 Rect 定位+置信度。
每个Grid只能预测对应两个Box,这两个Box共用一个分类结果(20 classes),
这是很不合理的临时方案,看来作者为第二篇论文预留了改进,没想被 SSD 抢了风头。
YOLO v2: S*S*K* (5 + C) => 13*13*9(5+20)
分辨率改成了13*13,更细的格子划分对小目标适应更好,再加上与Faster一样的K=9,计算量增加了不少。
通过Anchor Box改进,mAP由69.5下降到69.2,Recall由81%提升到了88%。
SSD(-): S*S*K*(4 + C) => 7*7*6*( 4+21 )
对应C=21,代表20种分类类别和一种 背景类。
E)Dimension Clusters(维度聚类)
还是针对Anchors,Faster的Anchor对应 K=9,那么为什么等于9呢?宽高比为什么定位成这样(1:1,1:2,2:1)?
对于SSD选择了K=6,那么K到底等于几合适?宽高比又该怎么设计? 作者给出了解决方案,这个解决方案就是聚类。
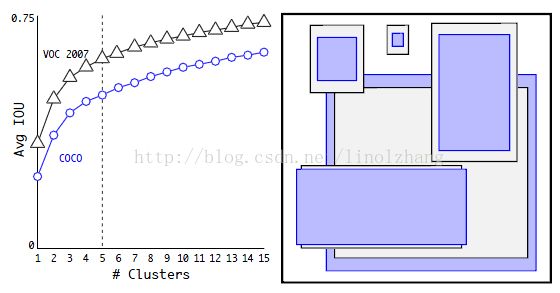
作者在 VOC和COCO上通过Ground Truth进行聚类统计(采用K-means算法),得到如下两个有用信息:
1)从K=1到K=5,IOU曲线上升较快(对应匹配度高),因此从效果和复杂度进行Trade Off, 选定了 Anchor Box个数为5;对应左图
2)统计发现,瘦高的框比扁平的框要多一些(人比车多?),选定了5种不同 宽高比+Scale 的 Anchor Box;对应右图
注:k-mans 采用的距离函数(度量标准) 描述为:
d(box,centroid) = 1 - IOU(box,centroid)
作者实验发现,5种boxes的Avg IOU(61.0)就和Faster R-CNN的9种Avg IOU(60.9)相当。 说明K-means方法的生成的boxes更具有代表性。
F)Direct location prediction(直接位置预测)
直接Anchor Box回归导致模型不稳定,对应公式也可以参考 Faster-RCNN论文,该公式没有任何约束,中心点可能会出现在图像任何位置,这就有可能导致回归过程震荡,甚至无法收敛:
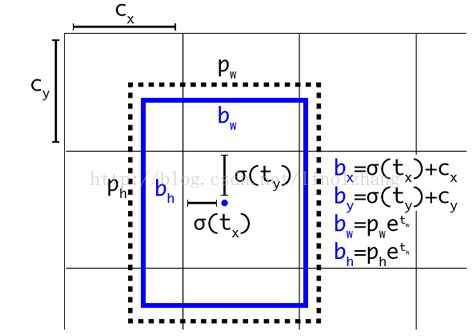
针对这个问题,作者在预测位置参数时采用了强约束方法:
1)对应 Cell 距离左上角的边距为(Cx,Cy),σ定义为sigmoid激活函数,将函数值约束到[0,1],用来预测相对于该Cell 中心的偏移(不会偏离cell);
2)预定Anchor(文中描述为bounding box prior)对应的宽高为(Pw,Ph),预测 Location 是相对于Anchor的宽高 乘以系数得到;
如下图所示:
作者通过使用 维度聚类 和 直接位置预测 这两项Anchor Boxes改进方法,将 mAP 提高了5%。
G)Fine-Grained Features(细粒度特征)
SSD通过不同Scale的Feature Map来预测Box来实现多尺度,而YOLO v2则采用了另一种思路:添加一个passthrough layer,来获取上一层26x26的特征,并将该特征同最后输出特征(13*13)相结合,以此来提高对小目标的检测能力。
通过Passthrough 把26 * 26 * 512的特征图叠加成13 * 13 * 2048的特征图,与原生的深层特征图相连接。
YOLO v2 使用扩展后的的特征图(add passthrough),将mAP提高了了1%。
PS:这里实际上是有个Trick,网络最后一层是13*13,相对原来7*7的网络来讲,细粒度的处理目标已经double了,再加上上一层26*26的Feature共同决策,这两层的贡献等价于SSD的4层以上,但计算量其实并没有增加多少。
H)Multi-Scale Training(多尺度训练)
为了让 YOLOv2 适应不同Scale下的检测任务,作者尝试 通过不同分辨率图片的训练来提高网络的适应性。
PS:网络只用到了卷积层和池化层,可以进行动态调整(检测任意大小图片)
具体做法是:
每经过10批训练(10 batches)就会随机选择新的图片尺寸,尺度定义为32的倍数,( 320,352,…,608 ),为了最后一层得到特征图尺度为13*13(416=13*32),YOLO v2 输入图片尺寸为416 * 416,降采样参数为32。

二. 训练过程
作者采用的深度学习框架是Darknet,该框架作者使用很少,具体不作描述。
a)预训练 - 训练分类网络(Training for classification)
采用随机梯度下降法SGD,在 ImageNet-1000分类数据集 上训练了160个epochs,参数设定:
初始学习率 - starting learning rate:0.1
多项式速率衰减 - polynomial rate decay:4的幂次
权值衰减 - weight decay:0.0005
动量 - momentum:0.9
b)数据增广方法(Data augmentation)
采用了常见的data augmentation,包括:
随机裁剪、旋转 - random crops、rotations
色调、饱和度、曝光偏移 - hue、saturation、exposure shifts
c)多分辨率训练
通过初始的224 * 224训练后,把分辨率上调到了448 * 448,同样的参数又训练了10个epochs,然后将学习率调整到了10^{-3}。
d)训练检测网络 - Training for detection
把分类网络改成检测网络,去掉原网络最后一个卷积层,增加了三个 3 * 3 (1024 filters)的卷积层,并且在每一个卷积层后面跟一个1 * 1的卷积层,输出个数是检测所需要的数量。
初始学习率为10^{-3},训练了160个epochs(划分为60 | 10 | 90),权值衰减 与 momentum参数与前面一样。
三. 交叉数据集训练
大家都知道,不同的数据集有不同的作用,通常我们采用一个数据集进行训练,而作者提出了新的思路:
通过ImageNet训练分类,COCO和VOC数据集来训练检测,这是一个很有价值的思路,可以让我们在公网上达到比较优的效果。 通过将两个数据集混合训练,如果遇到来自分类集的图片则只计算分类的Loss,遇到来自检测集的图片则计算完整的Loss。
这里面是有问题的,ImageNet对应分类有9000种,而COCO则只提供80种目标检测,这中间如何Match?答案就是multi-label模型,即假定一张图片可以有多个label,并且不要求label间独立。
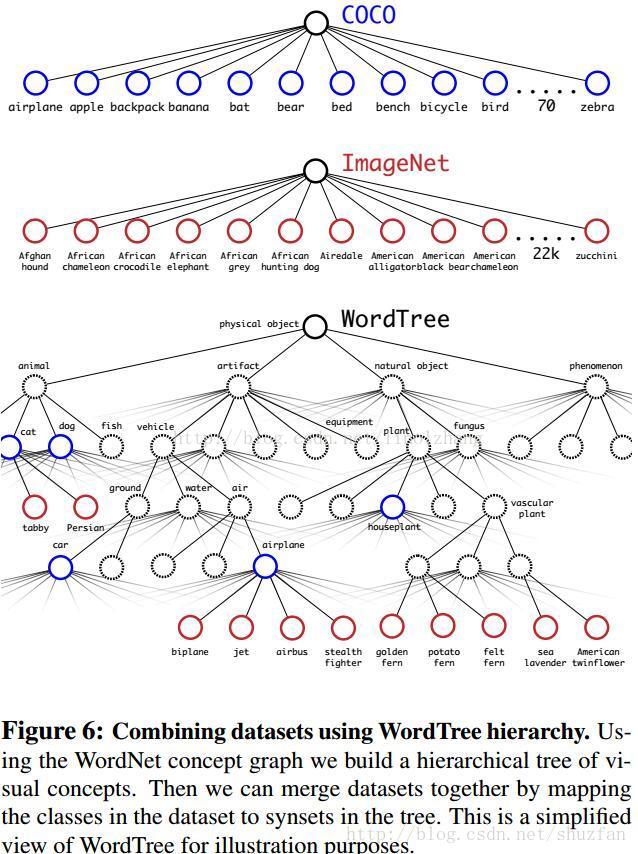
还是通过作者Paper里的图来说明,由于ImageNet的类别是从WordNet选取的,作者采用以下策略重建了一个树形结构(称为分层树):
1)遍历Imagenet的label,然后在WordNet中寻找该label到根节点(指向一个物理对象)的路径;
2)如果路径直有一条,那么就将该路径直接加入到分层树结构中;
3)否则,从剩余的路径中选择一条最短路径,加入到分层树。
这个分层树我们称之为 Word Tree,作用就在于将两种数据集按照层级进行结合。
分类时的概率计算借用了决策树思想,某个节点的概率值等于 该节点到根节点的所有条件概率之积。
另外,softmax操作也同时应该采用分组操作,下图上半部分为ImageNet对应的原生Softmax,下半部分对应基于Word Tree的Softmax:
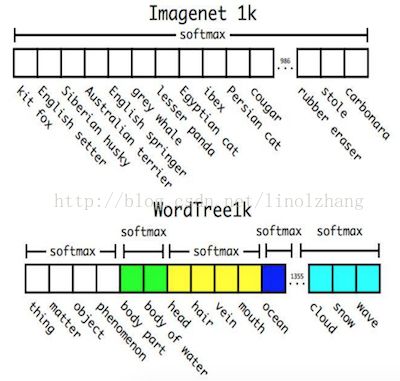
通过上述方案构造WordTree,得到对应9418个分类,通过重采样保证Imagenet和COCO的样本数据比例为4:1(这个没有太明显的意义,你也可以改成6:1试试效果)。
四. 效果如何?
YOLO v2 在大尺寸图片上能够实现高精度,在小尺寸图片上运行更快,可以说在速度和精度上达到了平衡。总结下不同分辨率下的震撼的效果:
1)低分辨率 - 228 * 228,帧率达到90FPS,mAP几乎与Faster媲美;
2)高分辨率,在VOC2007 上mAP达到78.6%,同时FPS=40;
看图说话:

相比SSD,YOLOv2添加了诸多工程Trick,虽然在算法理论上并没有明确的突破,但效果着实提升不少,相信实用性仍是我们的第一出发点,为作者点赞!